
漂流探测水下机器人装置及控制方法.pdf

An****70


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

漂流探测水下机器人装置及控制方法.pdf
本发明公开了一种漂流探测水下机器人装置及控制方法,属于探测水下机器人技术领域。机器人主体是鱼雷型结构,在机器人艏部搭载水文探测设备ADCP(声学多普勒剖面测速仪)、测距声呐、应急抛载;中间舱段为耐压舱,耐压舱内分为能源舱和控制舱两部分,能源舱内有两块高能量密度锂电池,分别用于动力和控制供电;尾段搭载保形天线(包含北斗定位与通讯、无线电和WiFi)、DVL、深度计、测距声呐。在机器人尾部左右两侧布置高效率推进器,在机器人前后各设置一个垂向槽道推进器。本发明根据机器人周围环境、任务指令,智能实现选择漂流模式的

一种水下机器人目标探测装置及探测方法.pdf
本发明提供的是一种水下机器人目标探测装置及探测方法。包括PC/104计算机、单波束前视声纳设备传感器、多普勒计、深度计、高度计及继电器元件。当在水下状态时,计算机上电后,设备控制程序自主运行,通过DI\O数字板控制继电器打开传感器,由单波束前视声纳完成行进方向的环境信息采集,利用多普勒计信息对数据进行校正,通过对深度信息对数据进行划分,通过处理算法得到水下目标点水平面信息,依据深度计信息对目标水下深度信息进行估计,从而实现对水下目标的检测。本发明避免了多波束前视声纳以及三维声呐存在的空间占有问题,有效地解

基于水下机器人定位与探测方法研究综述.docx
基于水下机器人定位与探测方法研究综述水下机器人在海洋资源开发、海底搜寻与勘探、水下工程维护等领域具有广泛的应用。在水下机器人任务完成过程中,精确的定位探测是必须的。一、水下机器人定位技术水下机器人的定位技术分为两种:一种是粗定位技术;另一种是精确定位技术。粗定位技术主要指的是利用声纳,通过声波测距技术,大致了解水下机器人的位置。精确定位技术则是通过水下机器人配备的各种传感器,包括慢速陀螺仪、加速度计等,以及使用卫星引导系统,实现对水下机器人位置、方向、速度等精确测量。1.声纳测距定位技术声纳测距技术是最常

一种水下机器人控制装置及方法.pdf
本发明公开了一种水下机器人控制装置,包括控制器、水下机器人,所述水下机器人上固定设置有陀螺仪、过滤器、行走机构,所述陀螺仪的输出端、所述过滤器的输入端分别与所述控制器的输入端相联接,所述控制器的输出端与所述水下机器人的输入端相联接,所述陀螺仪、所述行走机构与所述过滤器分别用来获取所述水下机器人的行走角度、行走位移以及过滤控制。本发明解决了水下机器人作业技术领域的环境监测和水下升降的功能的实现,提高了水下作业的工作效率和环境适应范围,减少了水下救援作业的作业难度;行走机构采用麦克纳姆轮,便于横向、斜向以及转
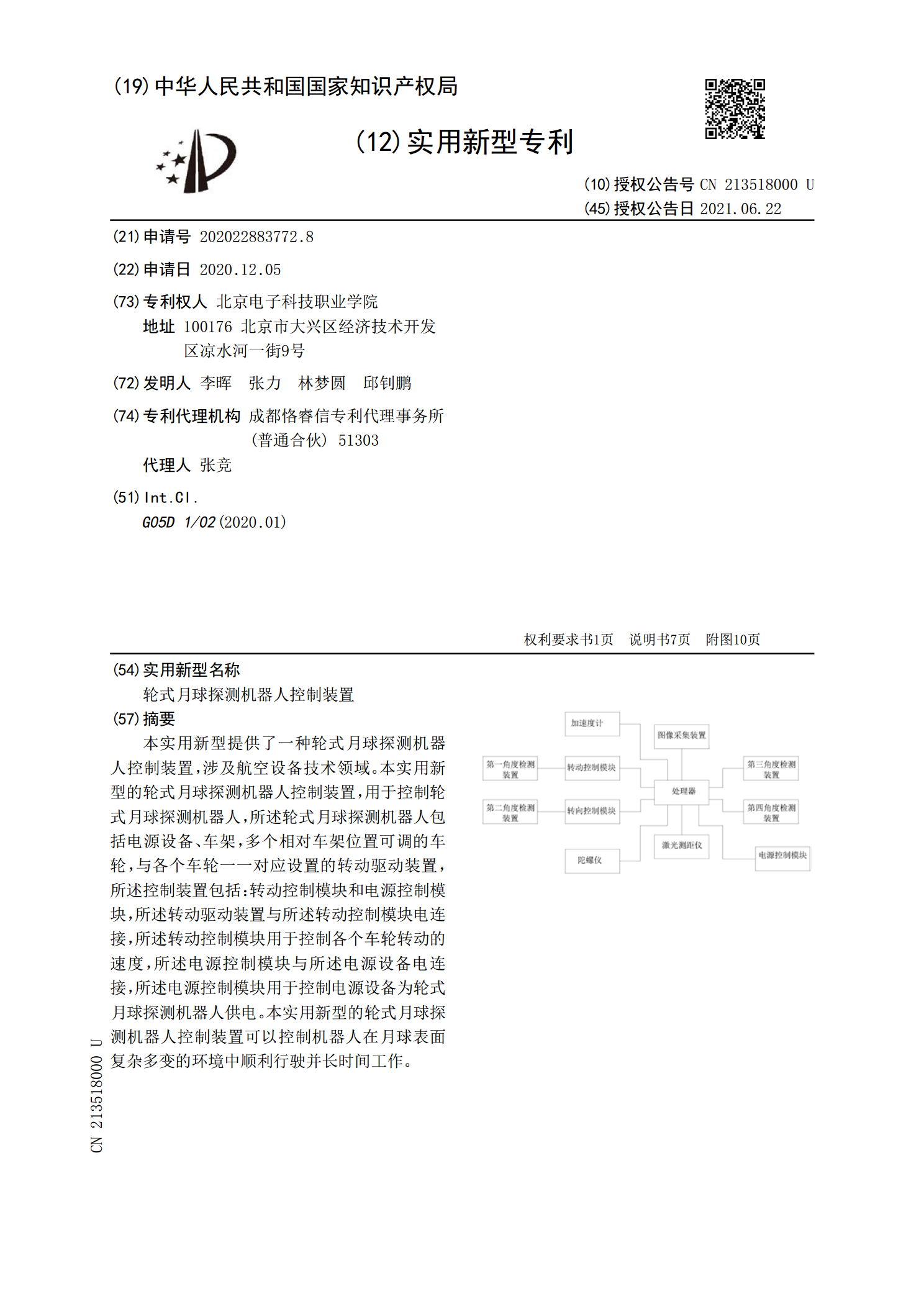
轮式月球探测机器人控制装置.pdf
本实用新型提供了一种轮式月球探测机器人控制装置,涉及航空设备技术领域。本实用新型的轮式月球探测机器人控制装置,用于控制轮式月球探测机器人,所述轮式月球探测机器人包括电源设备、车架,多个相对车架位置可调的车轮,与各个车轮一一对应设置的转动驱动装置,所述控制装置包括:转动控制模块和电源控制模块,所述转动驱动装置与所述转动控制模块电连接,所述转动控制模块用于控制各个车轮转动的速度,所述电源控制模块与所述电源设备电连接,所述电源控制模块用于控制电源设备为轮式月球探测机器人供电。本实用新型的轮式月球探测机器人控制装