
一种水下机器人目标探测装置及探测方法.pdf

星星****眨眼


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水下机器人目标探测装置及探测方法.pdf
本发明提供的是一种水下机器人目标探测装置及探测方法。包括PC/104计算机、单波束前视声纳设备传感器、多普勒计、深度计、高度计及继电器元件。当在水下状态时,计算机上电后,设备控制程序自主运行,通过DI\O数字板控制继电器打开传感器,由单波束前视声纳完成行进方向的环境信息采集,利用多普勒计信息对数据进行校正,通过对深度信息对数据进行划分,通过处理算法得到水下目标点水平面信息,依据深度计信息对目标水下深度信息进行估计,从而实现对水下目标的检测。本发明避免了多波束前视声纳以及三维声呐存在的空间占有问题,有效地解
一种水下目标探测装置.pdf
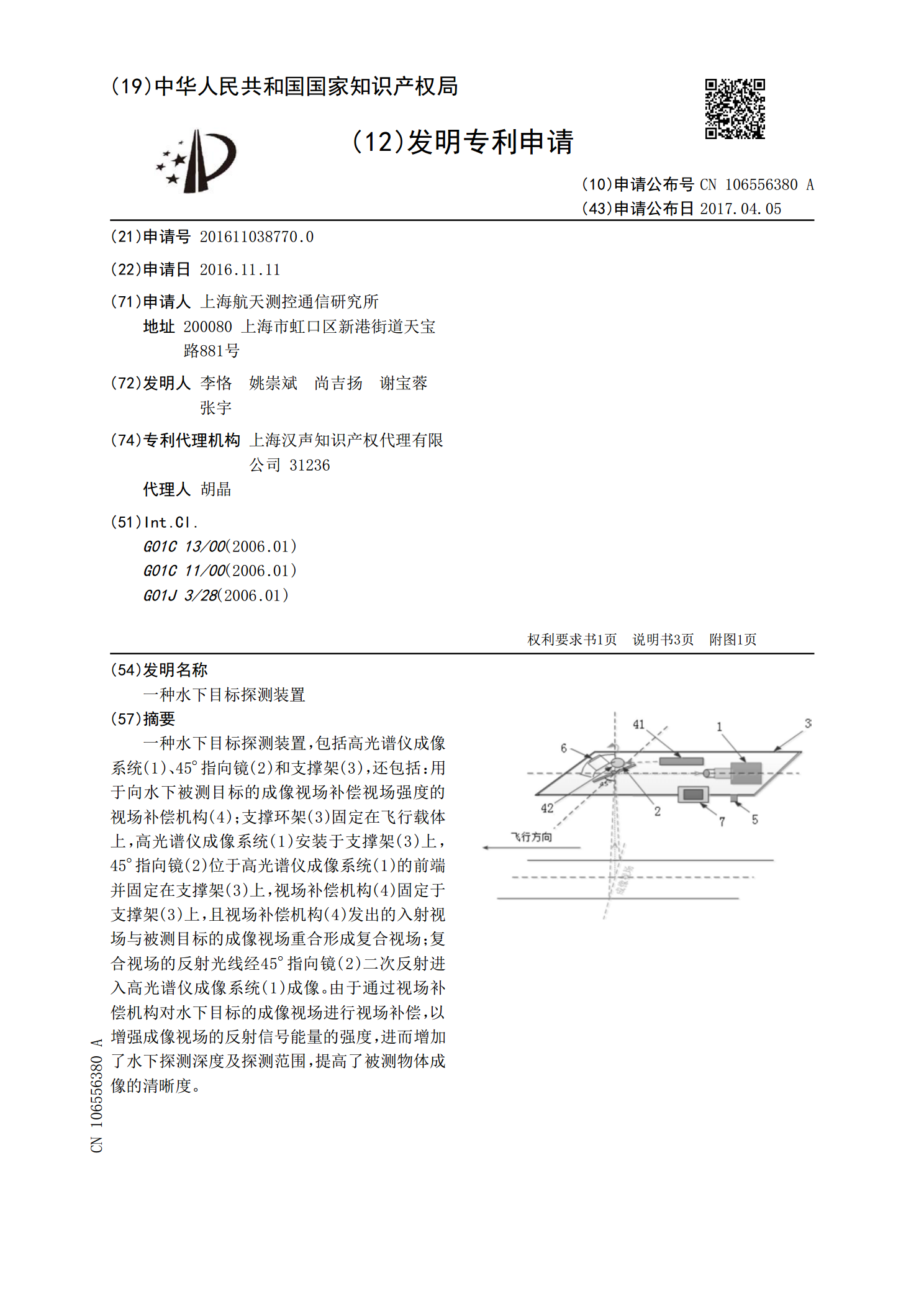
一种水下目标探测装置,包括高光谱仪成像系统(1)、45°指向镜(2)和支撑架(3),还包括:用于向水下被测目标的成像视场补偿视场强度的视场补偿机构(4);支撑环架(3)固定在飞行载体上,高光谱仪成像系统(1)安装于支撑架(3)上,45°指向镜(2)位于高光谱仪成像系统(1)的前端并固定在支撑架(3)上,视场补偿机构(4)固定于支撑架(3)上,且视场补偿机构(4)发出的入射视场与被测目标的成像视场重合形成复合视场;复合视场的反射光线经45°指向镜(2)二次反射进入高光谱仪成像系统(1)成像。由于通过视场补偿
水下目标探测的方法.pdf
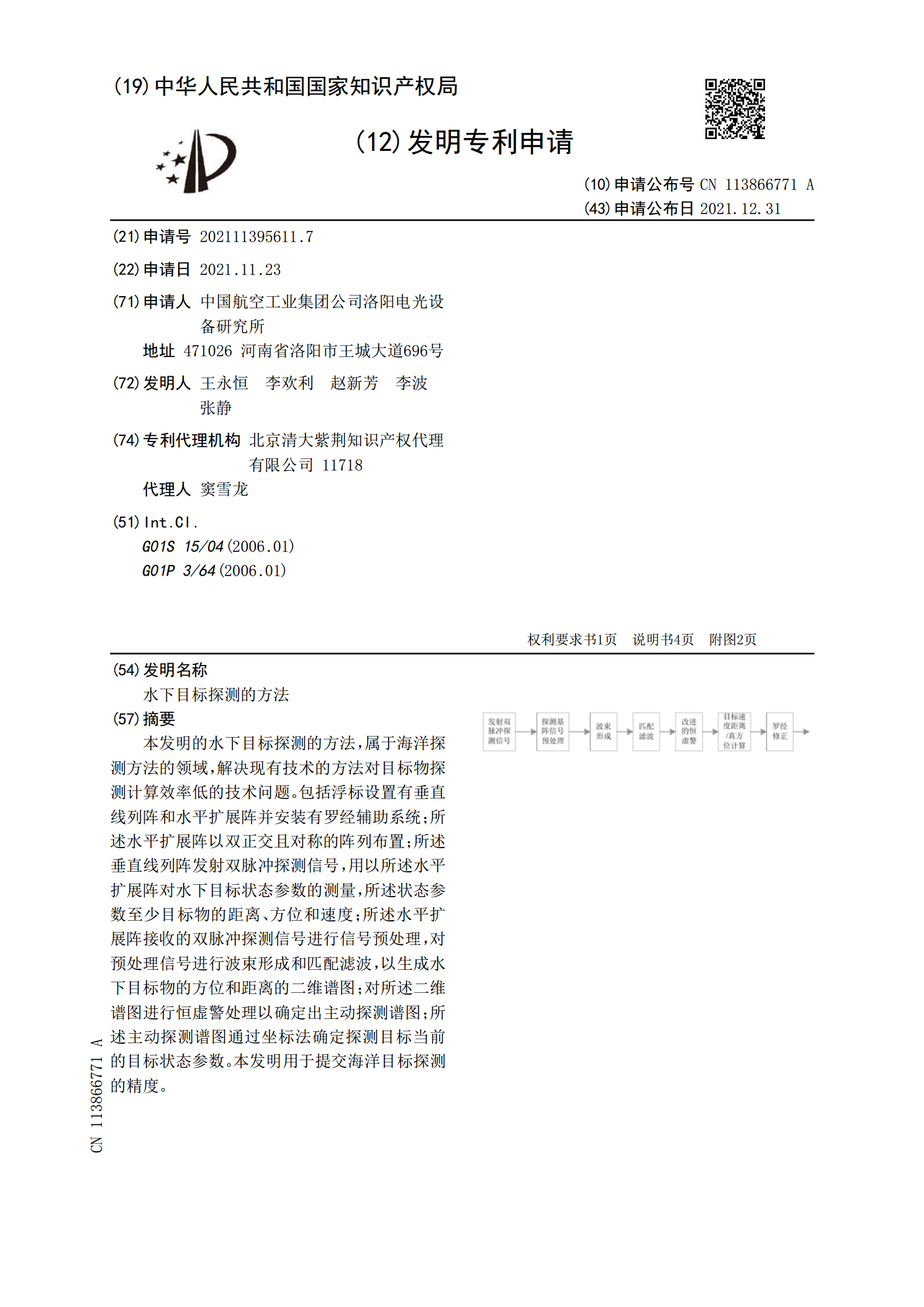
本发明的水下目标探测的方法,属于海洋探测方法的领域,解决现有技术的方法对目标物探测计算效率低的技术问题。包括浮标设置有垂直线列阵和水平扩展阵并安装有罗经辅助系统;所述水平扩展阵以双正交且对称的阵列布置;所述垂直线列阵发射双脉冲探测信号,用以所述水平扩展阵对水下目标状态参数的测量,所述状态参数至少目标物的距离、方位和速度;所述水平扩展阵接收的双脉冲探测信号进行信号预处理,对预处理信号进行波束形成和匹配滤波,以生成水下目标物的方位和距离的二维谱图;对所述二维谱图进行恒虚警处理以确定出主动探测谱图;所述主动探测
一种偏振成像水下装置与目标探测方法.pdf
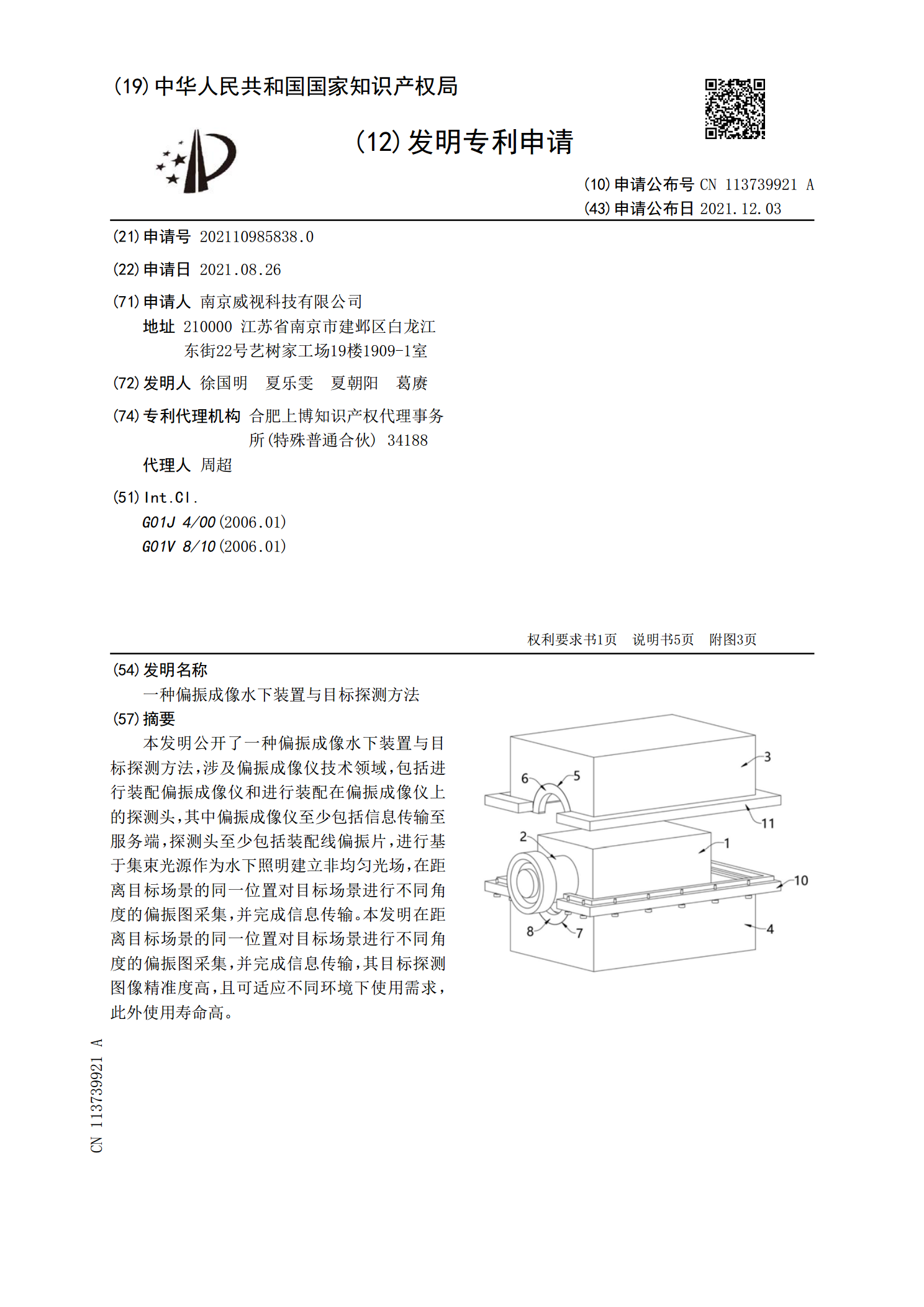
本发明公开了一种偏振成像水下装置与目标探测方法,涉及偏振成像仪技术领域,包括进行装配偏振成像仪和进行装配在偏振成像仪上的探测头,其中偏振成像仪至少包括信息传输至服务端,探测头至少包括装配线偏振片,进行基于集束光源作为水下照明建立非均匀光场,在距离目标场景的同一位置对目标场景进行不同角度的偏振图采集,并完成信息传输。本发明在距离目标场景的同一位置对目标场景进行不同角度的偏振图采集,并完成信息传输,其目标探测图像精准度高,且可适应不同环境下使用需求,此外使用寿命高。

漂流探测水下机器人装置及控制方法.pdf
本发明公开了一种漂流探测水下机器人装置及控制方法,属于探测水下机器人技术领域。机器人主体是鱼雷型结构,在机器人艏部搭载水文探测设备ADCP(声学多普勒剖面测速仪)、测距声呐、应急抛载;中间舱段为耐压舱,耐压舱内分为能源舱和控制舱两部分,能源舱内有两块高能量密度锂电池,分别用于动力和控制供电;尾段搭载保形天线(包含北斗定位与通讯、无线电和WiFi)、DVL、深度计、测距声呐。在机器人尾部左右两侧布置高效率推进器,在机器人前后各设置一个垂向槽道推进器。本发明根据机器人周围环境、任务指令,智能实现选择漂流模式的