
一种多普勒雷达辅助GPS/INS车辆测速方法.pdf

曦晨****22

1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多普勒雷达辅助GPS/INS车辆测速方法.pdf
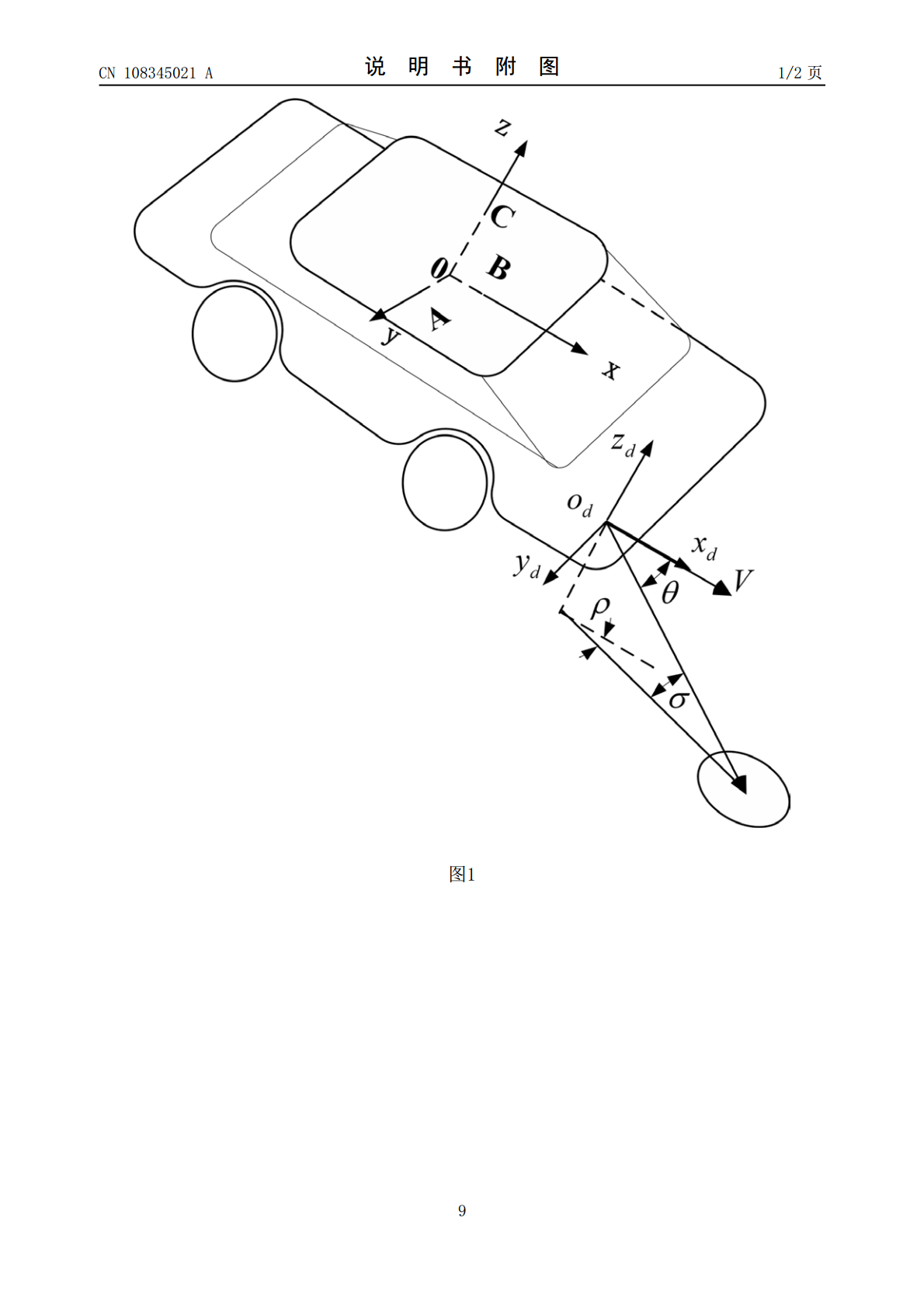
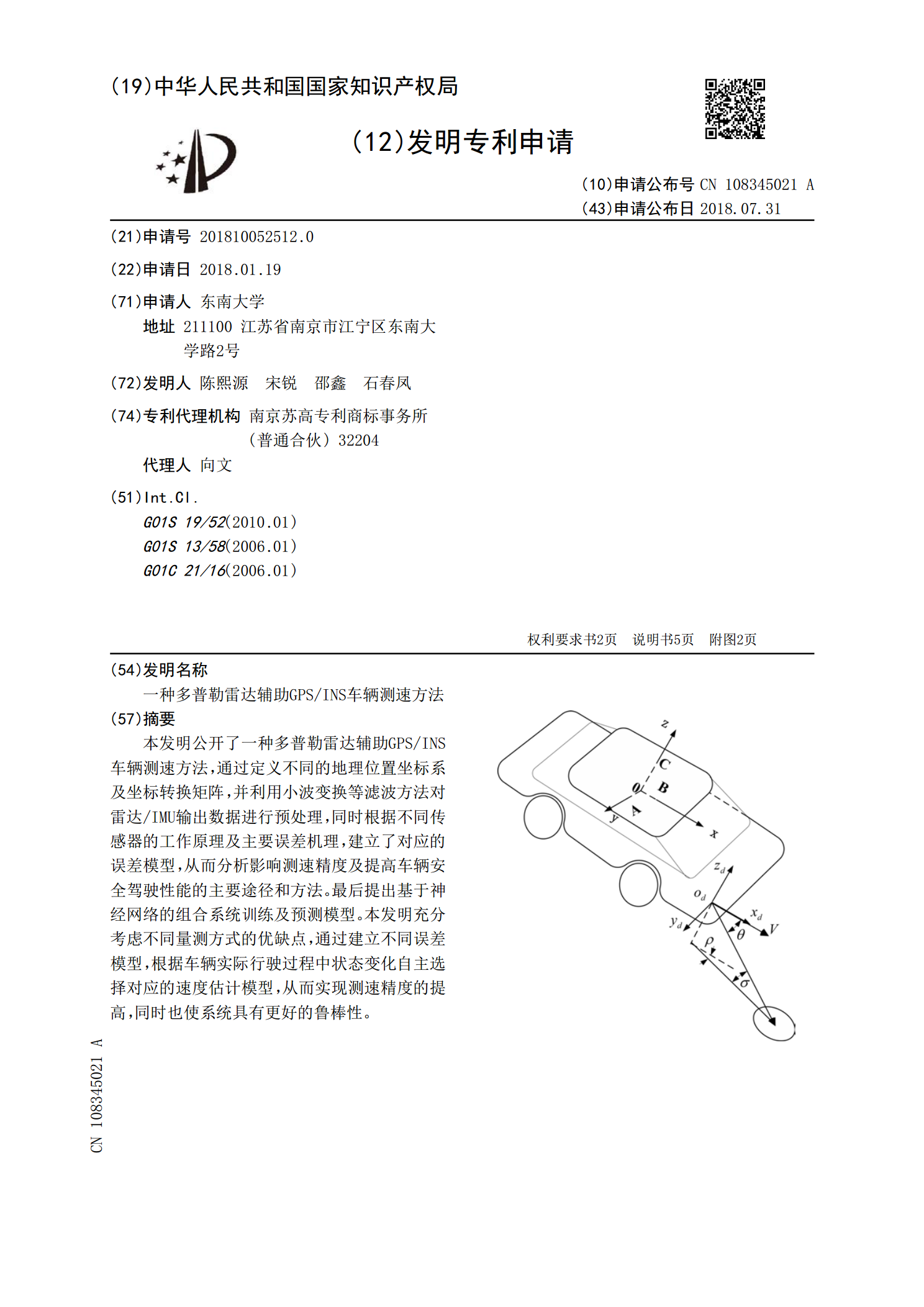
本发明公开了一种多普勒雷达辅助GPS/INS车辆测速方法,通过定义不同的地理位置坐标系及坐标转换矩阵,并利用小波变换等滤波方法对雷达/IMU输出数据进行预处理,同时根据不同传感器的工作原理及主要误差机理,建立了对应的误差模型,从而分析影响测速精度及提高车辆安全驾驶性能的主要途径和方法。最后提出基于神经网络的组合系统训练及预测模型。本发明充分考虑不同量测方式的优缺点,通过建立不同误差模型,根据车辆实际行驶过程中状态变化自主选择对应的速度估计模型,从而实现测速精度的提高,同时也使系统具有更好的鲁棒性。
一种多普勒雷达水流测速的方法及装置.pdf
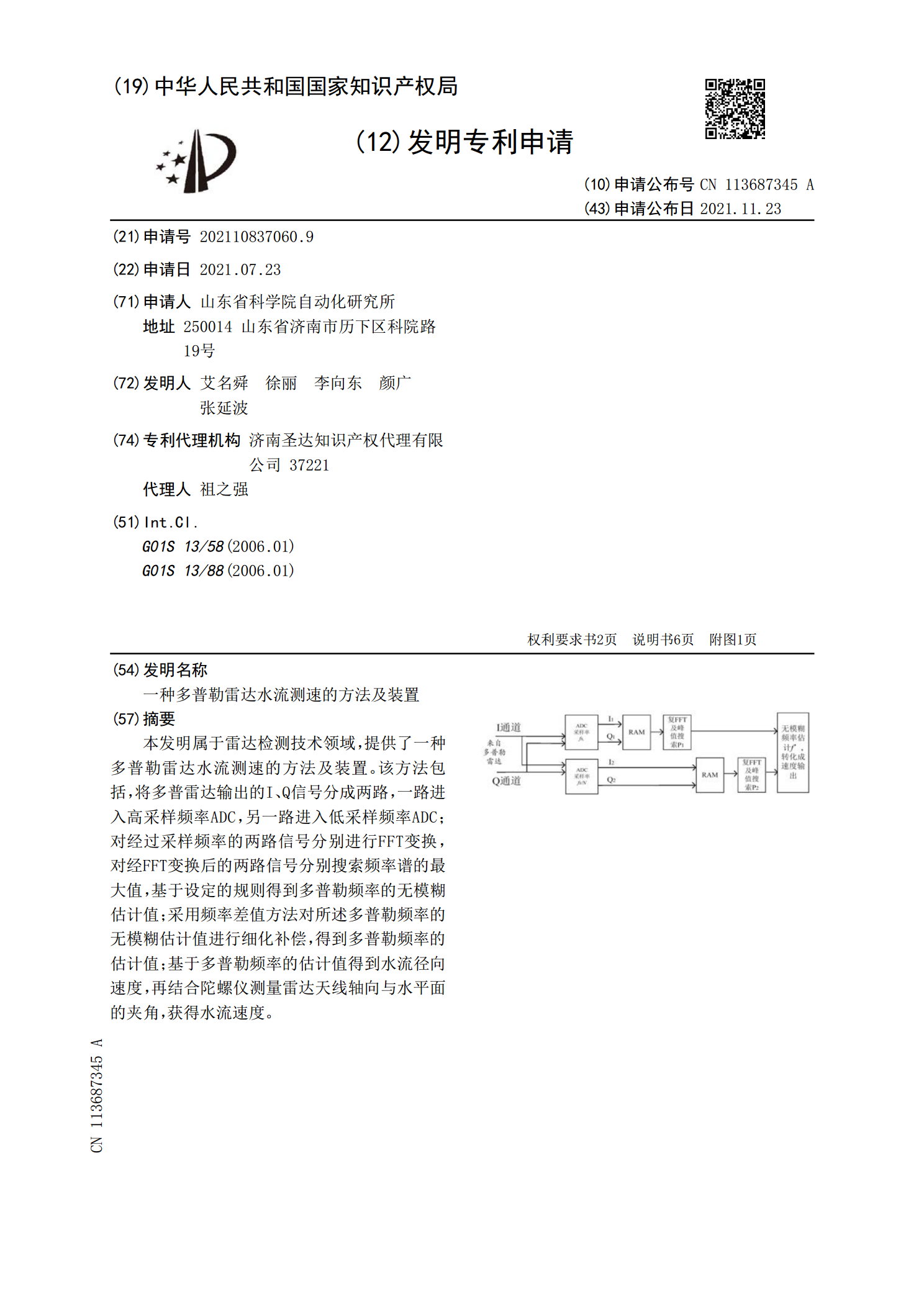
本发明属于雷达检测技术领域,提供了一种多普勒雷达水流测速的方法及装置。该方法包括,将多普雷达输出的I、Q信号分成两路,一路进入高采样频率ADC,另一路进入低采样频率ADC;对经过采样频率的两路信号分别进行FFT变换,对经FFT变换后的两路信号分别搜索频率谱的最大值,基于设定的规则得到多普勒频率的无模糊估计值;采用频率差值方法对所述多普勒频率的无模糊估计值进行细化补偿,得到多普勒频率的估计值;基于多普勒频率的估计值得到水流径向速度,再结合陀螺仪测量雷达天线轴向与水平面的夹角,获得水流速度。

一种测速多普勒雷达减振装置.pdf
本发明提供了一种测速多普勒雷达减振装置,主要包括信号处理、接收组合、天线罩,其特征在于包括主壳体、减振系统;所述主壳体上下两端开口的矩形筒体,共形天线罩通过主壳体上的法兰框固定在弹体上,共形天线罩的弧度与弹体共形;在信号处理、接收组合加装减振系统。本发明提高多普勒雷达抗干扰能力、测量精度和可靠性,适用高速飞行器上多普勒雷达的需求。

一种车用多普勒雷达测速装置.pdf
本发明涉及一种车用多普勒雷达测速装置,具有前端检测单元,其特征在于:前端检测单元信号输出端接信号调理单元,信号调理单元信号输出端接控制单元,控制单元信号输出端接测速输出接口单元。
多普勒效应和雷达测速.doc
多普勒效应和雷达测速你一定有这样的经验当你站在马路旁边即使没有去注视路面上车辆的行驶的情况单凭耳朵的听觉判断你能感到一辆汽车正在驶过来或者离你而去。这里面当然依靠汽车行驶的声间是渐强还是渐弱但细细想想主要还是根据汽车行驶的车轮声或剌叭声调的变化。原来车辆驶近时声音要变尖也就是说音调要高些;开过以后远离的时候声音会越来越低。为什么会这样呢?原来声音的形成首先是由于发声体的振动然后在它周围的空气中形成了一会疏一会密的声波传到耳朵里使耳膜随着它同样地振动起来人们就听到了声音。耳膜每秒钟振动的次数多