
一种无人船系统及基于该无人船系统进行地形测量的方法.pdf

书生****66


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人船系统及基于该无人船系统进行地形测量的方法.pdf
本发明公开了一种无人船系统及基于该无人船系统进行地形测量的方法,所述无人船系统包括采集设备,所述采集设备包括单波束测深仪、多波束测深仪、ADCP声学多普勒流速剖面仪、水质仪;数据采集系统,所述用于采集所述采集设备采集的数据;数据处理系统,所述数据处理系统用于数据取样与修正;数据导出系统,所述数据导出系统用于待所有的测线数据采样完后需要把htt文件转换为需要的成果数据,本发明使用无人船一体化调查系统进行测量,可有效解决传统作业方式效率低下,受地形环境等因素限制较大的情况,其中使用无人船搭载单波束测量1分钟能

用于水下地形测量的无人船系统.pdf
本发明公开了用于水下地形测量的无人船系统,包括采集设备,所述采集设备包括单波束测深仪、多波束测深仪、ADCP声学多普勒流速剖面仪、水质仪;数据采集系统,所述用于采集所述采集设备采集的数据;数据处理系统,所述数据处理系统用于数据取样与修正;数据导出系统,所述数据导出系统用于待所有的测线数据采样完后需要把htt文件转换为需要的成果数据,本发明使用无人船一体化调查系统进行测量,可有效解决传统作业方式效率低下,受地形环境等因素限制较大的情况,其中使用无人船搭载单波束测量1分钟能打60个点以上,以及无人船搭载多波束
一种无人船河道测量系统.pdf
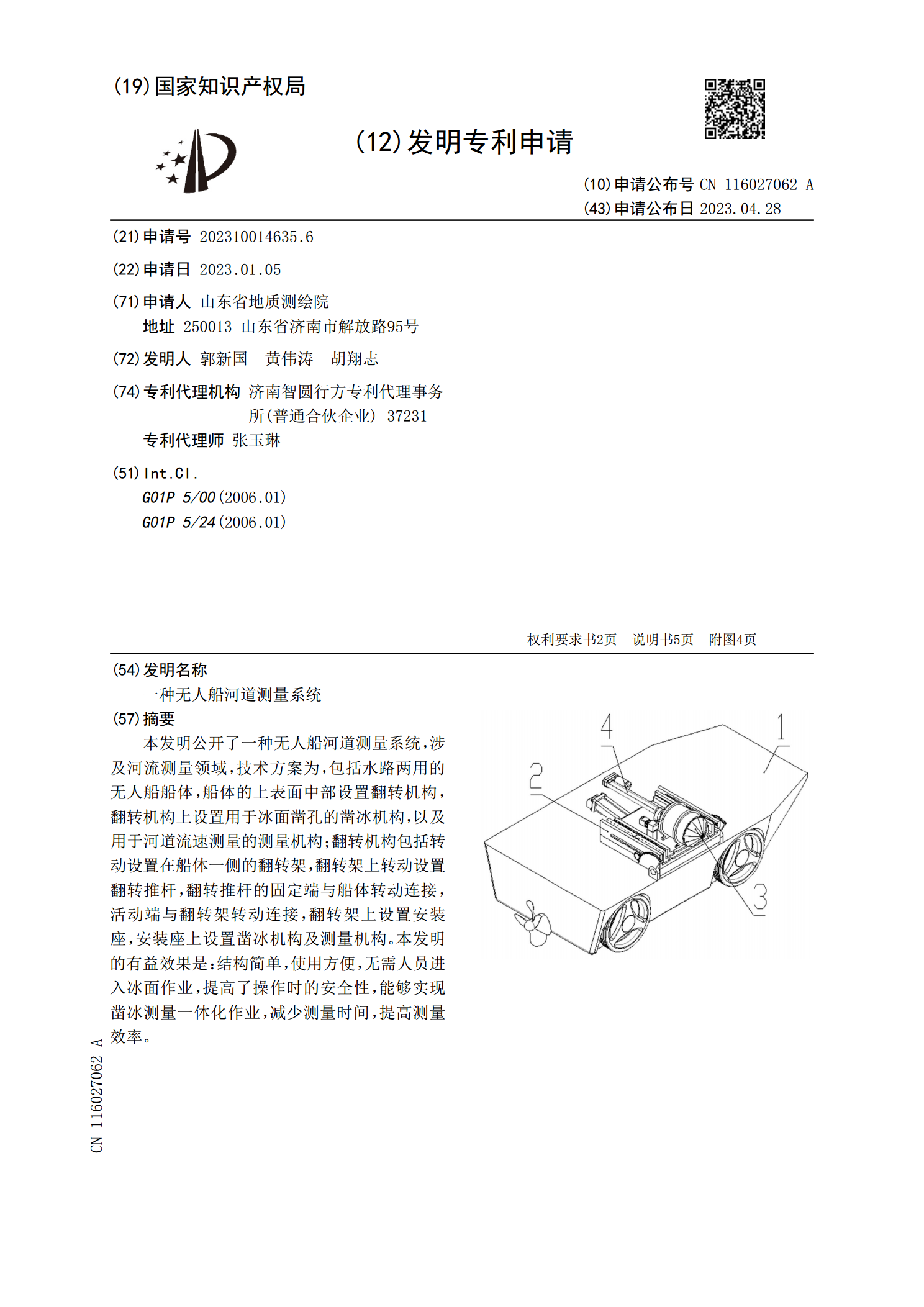
本发明公开了一种无人船河道测量系统,涉及河流测量领域,技术方案为,包括水路两用的无人船船体,船体的上表面中部设置翻转机构,翻转机构上设置用于冰面凿孔的凿冰机构,以及用于河道流速测量的测量机构;翻转机构包括转动设置在船体一侧的翻转架,翻转架上转动设置翻转推杆,翻转推杆的固定端与船体转动连接,活动端与翻转架转动连接,翻转架上设置安装座,安装座上设置凿冰机构及测量机构。本发明的有益效果是:结构简单,使用方便,无需人员进入冰面作业,提高了操作时的安全性,能够实现凿冰测量一体化作业,减少测量时间,提高测量效率。
一种无人船流速流量测量系统.pdf
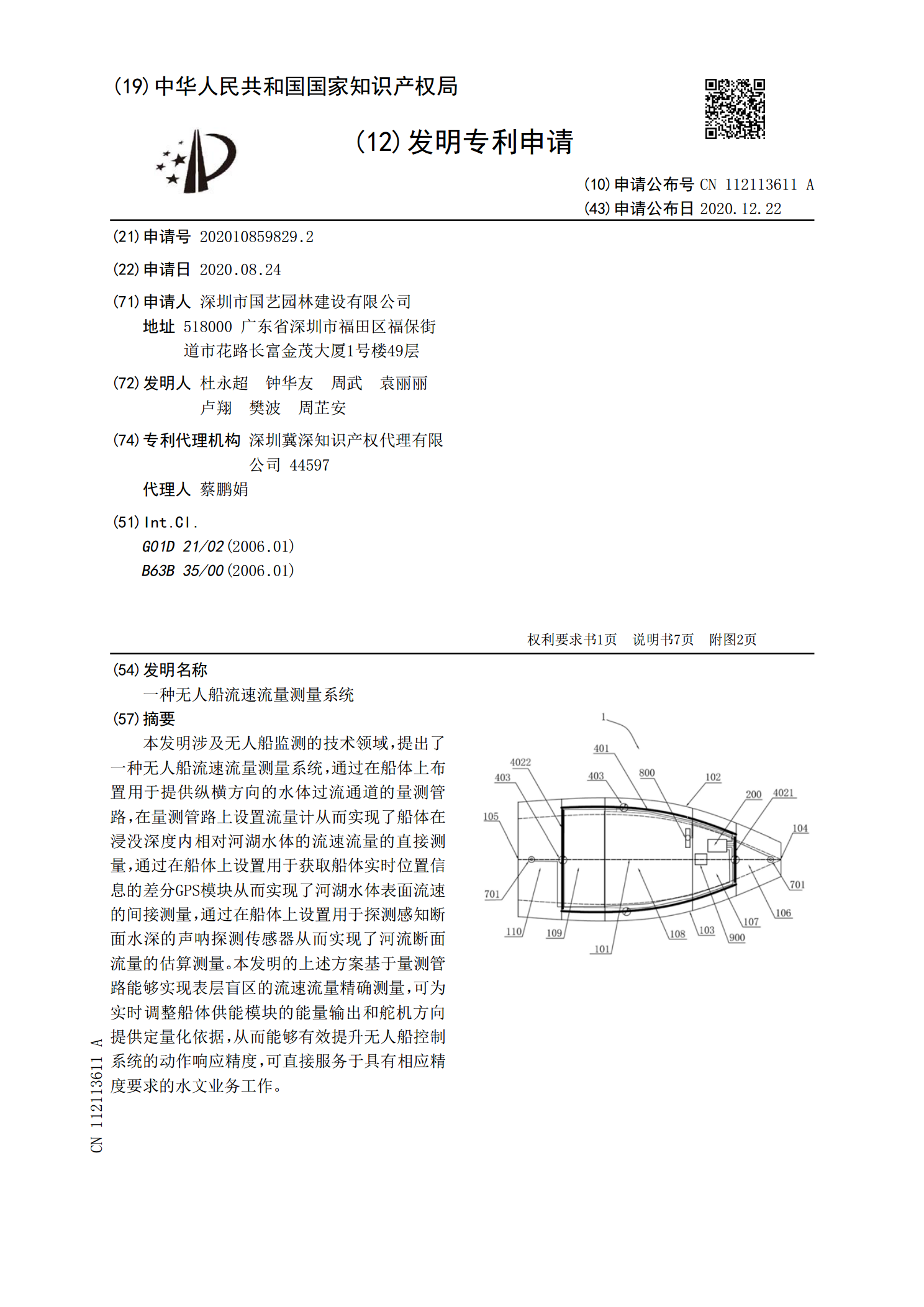
本发明涉及无人船监测的技术领域,提出了一种无人船流速流量测量系统,通过在船体上布置用于提供纵横方向的水体过流通道的量测管路,在量测管路上设置流量计从而实现了船体在浸没深度内相对河湖水体的流速流量的直接测量,通过在船体上设置用于获取船体实时位置信息的差分GPS模块从而实现了河湖水体表面流速的间接测量,通过在船体上设置用于探测感知断面水深的声呐探测传感器从而实现了河流断面流量的估算测量。本发明的上述方案基于量测管路能够实现表层盲区的流速流量精确测量,可为实时调整船体供能模块的能量输出和舵机方向提供定量化依据,
无人船路径规划方法及系统.pdf
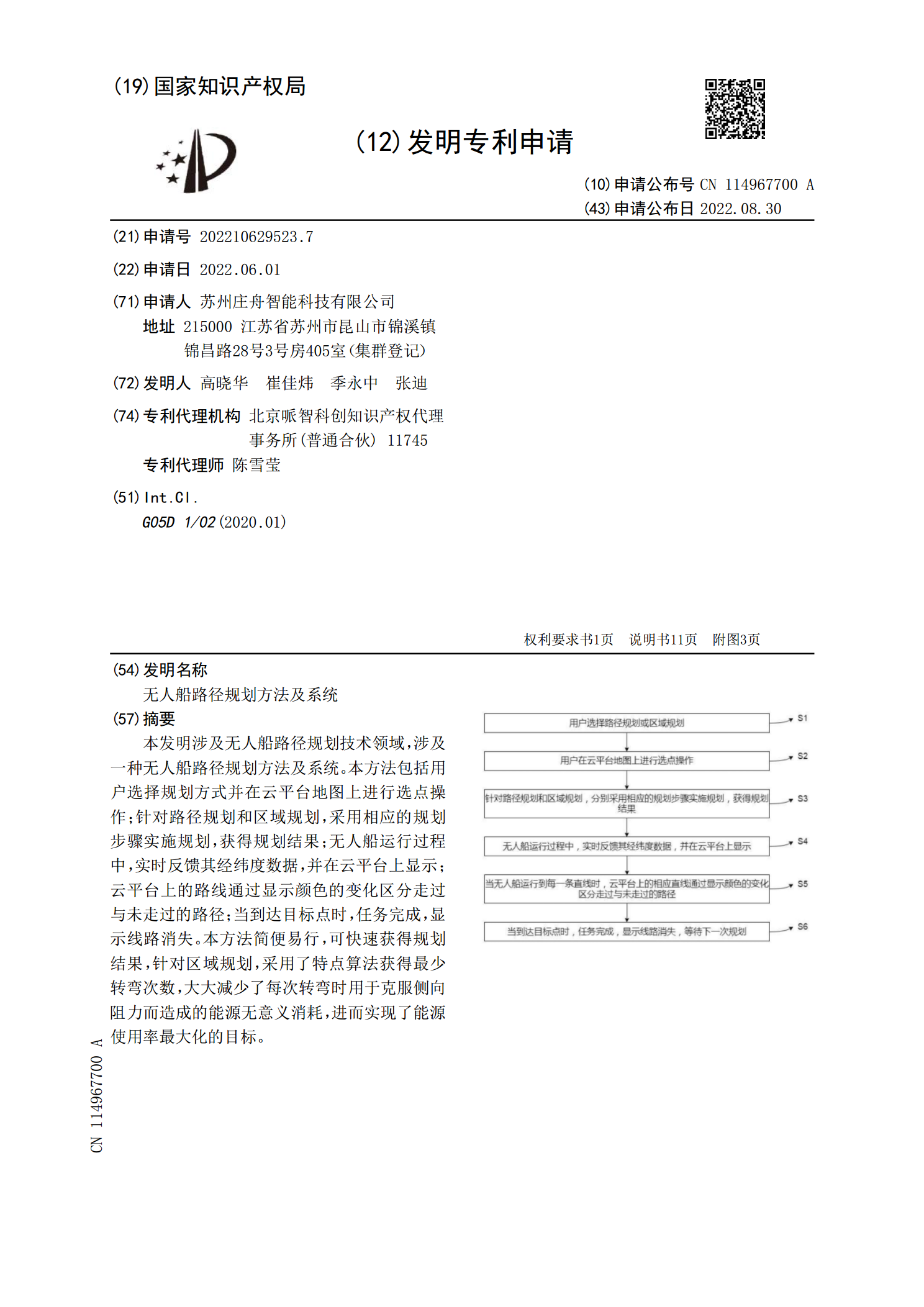
本发明涉及无人船路径规划技术领域,涉及一种无人船路径规划方法及系统。本方法包括用户选择规划方式并在云平台地图上进行选点操作;针对路径规划和区域规划,采用相应的规划步骤实施规划,获得规划结果;无人船运行过程中,实时反馈其经纬度数据,并在云平台上显示;云平台上的路线通过显示颜色的变化区分走过与未走过的路径;当到达目标点时,任务完成,显示线路消失。本方法简便易行,可快速获得规划结果,针对区域规划,采用了特点算法获得最少转弯次数,大大减少了每次转弯时用于克服侧向阻力而造成的能源无意义消耗,进而实现了能源使用率最大