
一种分布式可变扩散组合系数粒子滤波直接跟踪方法.pdf

书錦****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种分布式可变扩散组合系数粒子滤波直接跟踪方法.pdf
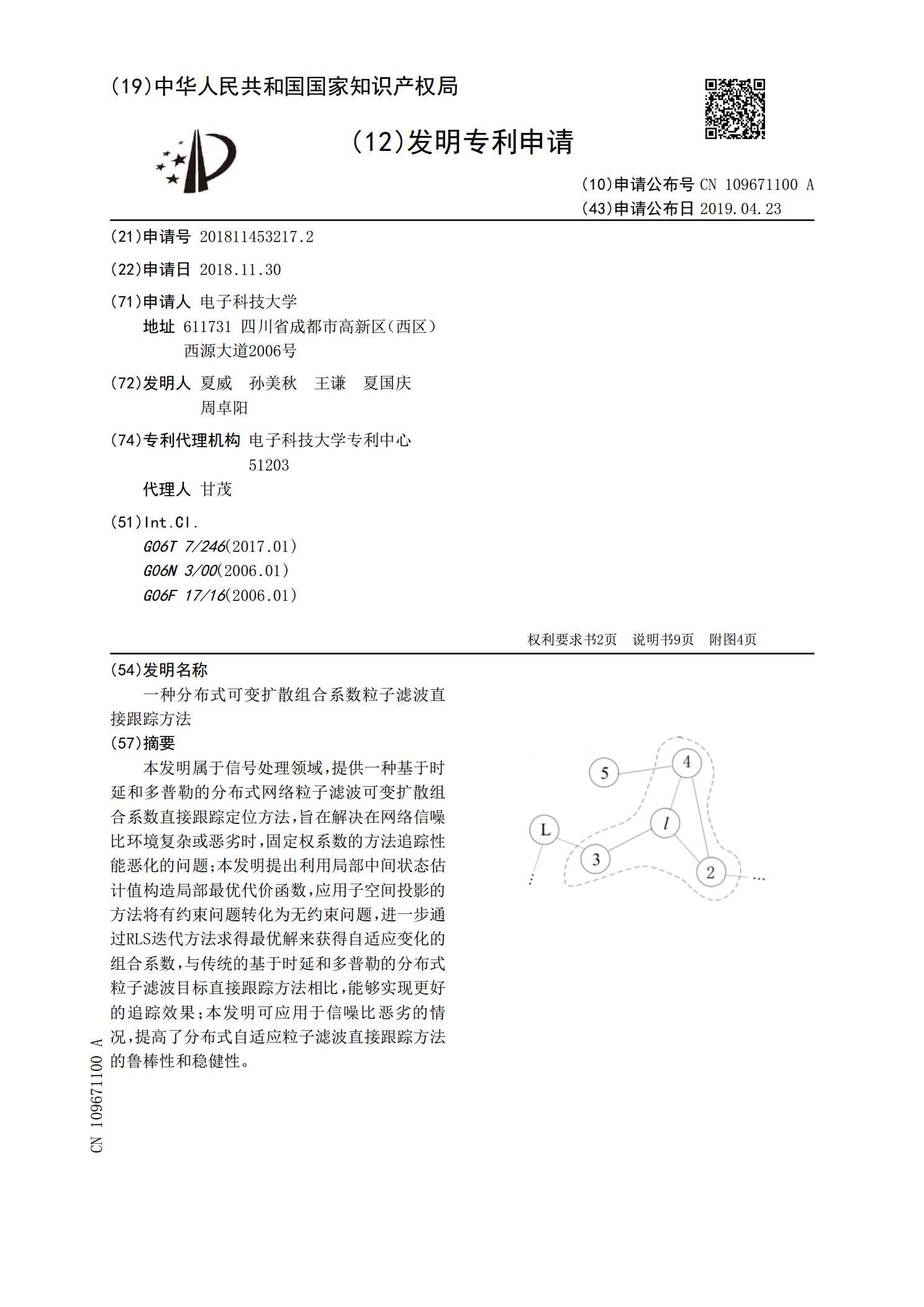
本发明属于信号处理领域,提供一种基于时延和多普勒的分布式网络粒子滤波可变扩散组合系数直接跟踪定位方法,旨在解决在网络信噪比环境复杂或恶劣时,固定权系数的方法追踪性能恶化的问题;本发明提出利用局部中间状态估计值构造局部最优代价函数,应用子空间投影的方法将有约束问题转化为无约束问题,进一步通过RLS迭代方法求得最优解来获得自适应变化的组合系数,与传统的基于时延和多普勒的分布式粒子滤波目标直接跟踪方法相比,能够实现更好的追踪效果;本发明可应用于信噪比恶劣的情况,提高了分布式自适应粒子滤波直接跟踪方法的鲁棒性和稳
一种分布式异构自适应粒子滤波直接跟踪方法.pdf
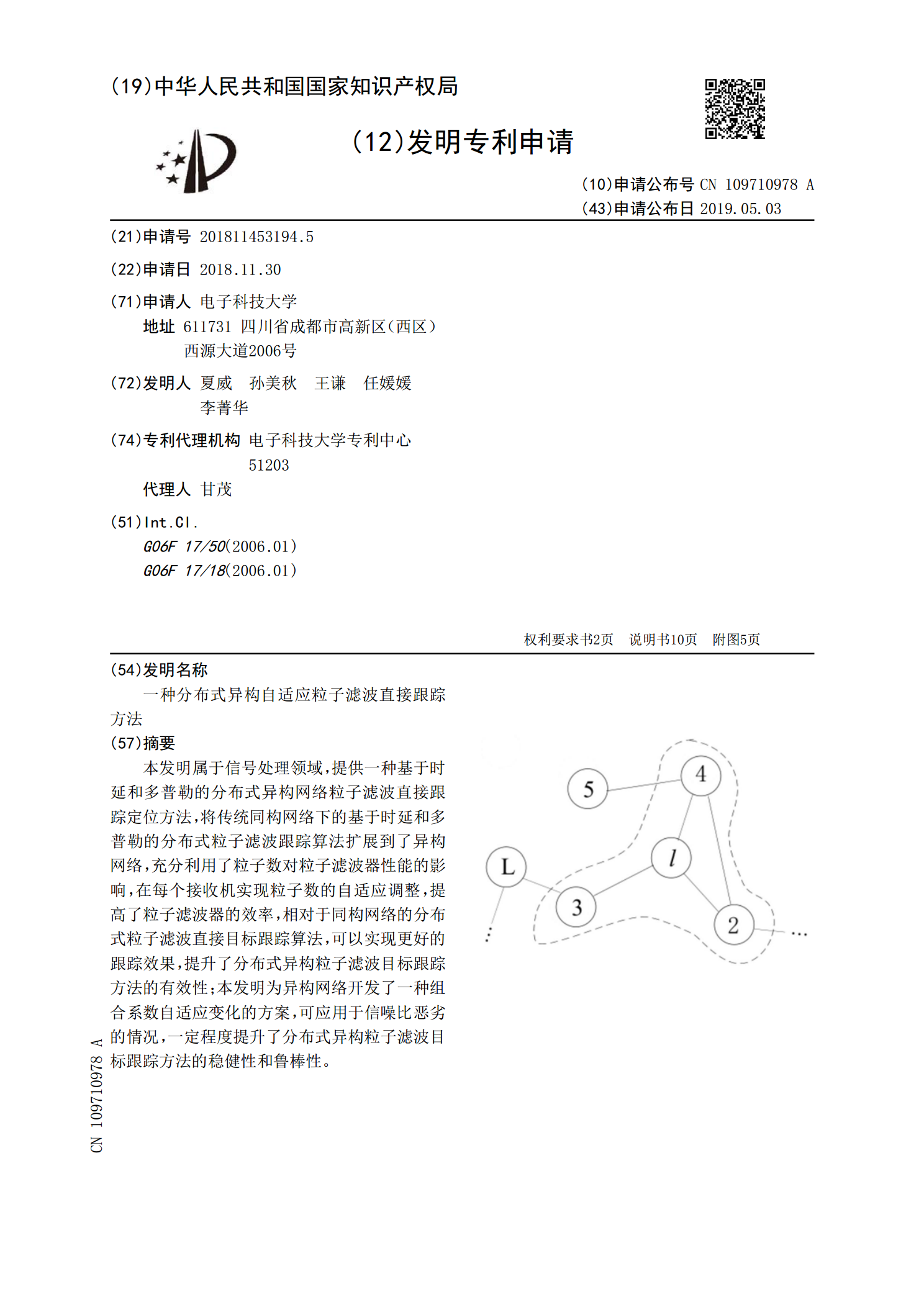
本发明属于信号处理领域,提供一种基于时延和多普勒的分布式异构网络粒子滤波直接跟踪定位方法,将传统同构网络下的基于时延和多普勒的分布式粒子滤波跟踪算法扩展到了异构网络,充分利用了粒子数对粒子滤波器性能的影响,在每个接收机实现粒子数的自适应调整,提高了粒子滤波器的效率,相对于同构网络的分布式粒子滤波直接目标跟踪算法,可以实现更好的跟踪效果,提升了分布式异构粒子滤波目标跟踪方法的有效性;本发明为异构网络开发了一种组合系数自适应变化的方案,可应用于信噪比恶劣的情况,一定程度提升了分布式异构粒子滤波目标跟踪方法的稳

一种基于时延和多普勒的分布式自适应粒子滤波直接跟踪定位方法.pdf
本发明属于信号处理领域,特别是涉及基于时差和频差的无源定位系统中分布式自适应跟踪定位方法;首先在接收机个数为N的无线传感器网络当中,局部GPF从局部重要函数中随机采M个随机预测粒子;然后进行接收机与邻居接收机的接收信号交换,接收机更新每个预测粒子所对应的权重值
一种基于粒子滤波的视频多目标跟踪方法.pdf
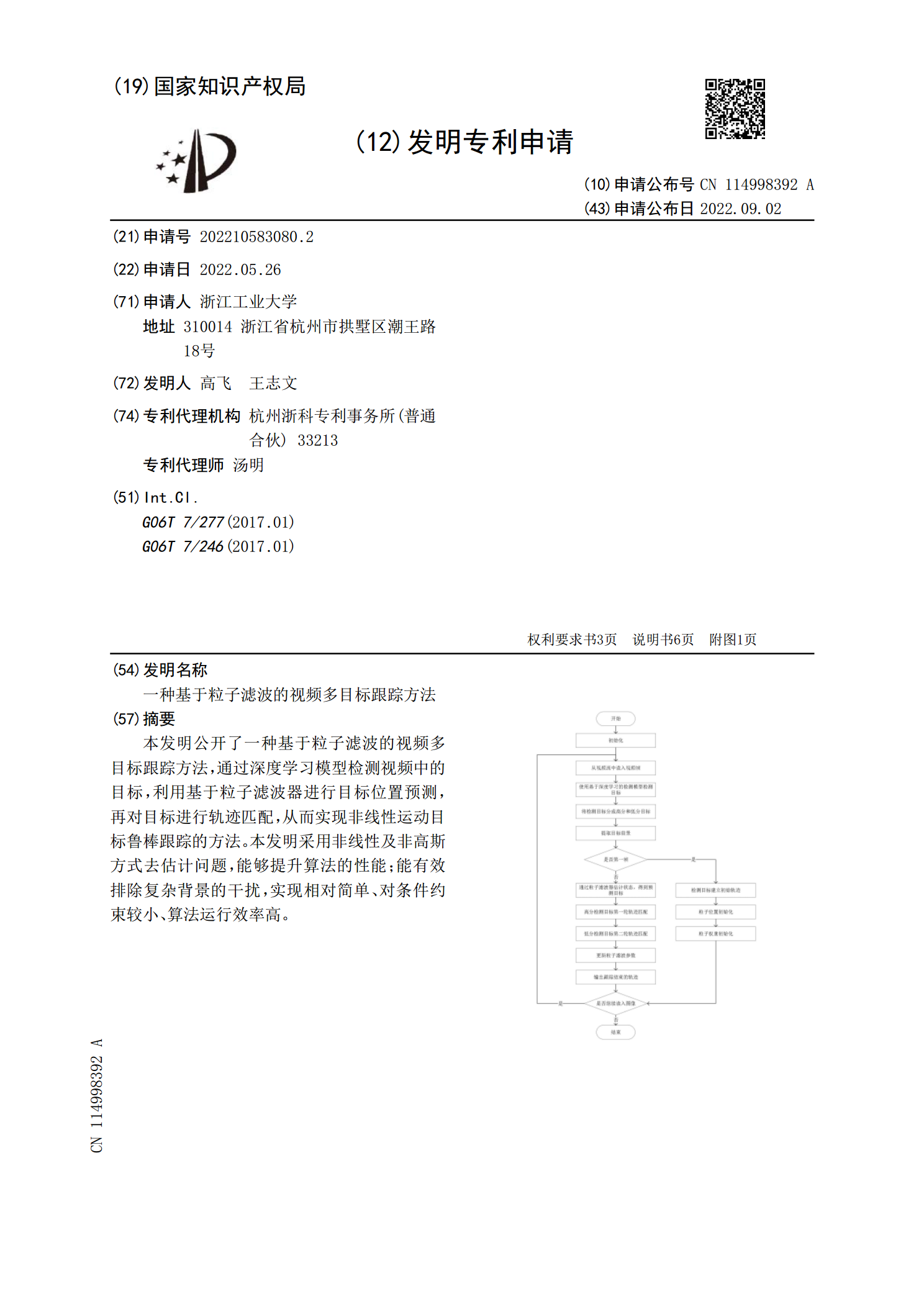
本发明公开了一种基于粒子滤波的视频多目标跟踪方法,通过深度学习模型检测视频中的目标,利用基于粒子滤波器进行目标位置预测,再对目标进行轨迹匹配,从而实现非线性运动目标鲁棒跟踪的方法。本发明采用非线性及非高斯方式去估计问题,能够提升算法的性能;能有效排除复杂背景的干扰,实现相对简单、对条件约束较小、算法运行效率高。

一种深海目标被动定位及粒子滤波跟踪方法.pdf
本发明提供了一种深海目标被动定位及粒子滤波跟踪方法,在类似于深海分布式垂直阵组网观测系统下实现深海目标被动定位及跟踪功能,主要利用的技术手段有宽/窄带检测及特征提取、声线逆推估距、改进的粒子滤波,相比于传统的匹配场处理、运动目标分析、几何定位法等被动目标定位技术。本发明对环境参数的要求较低,估计精度较高,且适用于静止且无水平测向能力的单节点构成的分布式系统中,仅通过目标俯仰角信息、目标多普勒信息,结合多节点的系统参数和声速剖面采集数据,即可得到对被动目标声源的实时定位与连续跟踪。该方法实现相对简单、对条件