
一种基于时延和多普勒的分布式自适应粒子滤波直接跟踪定位方法.pdf

斌斌****公主

1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于时延和多普勒的分布式自适应粒子滤波直接跟踪定位方法.pdf
本发明属于信号处理领域,特别是涉及基于时差和频差的无源定位系统中分布式自适应跟踪定位方法;首先在接收机个数为N的无线传感器网络当中,局部GPF从局部重要函数中随机采M个随机预测粒子;然后进行接收机与邻居接收机的接收信号交换,接收机更新每个预测粒子所对应的权重值
一种分布式异构自适应粒子滤波直接跟踪方法.pdf
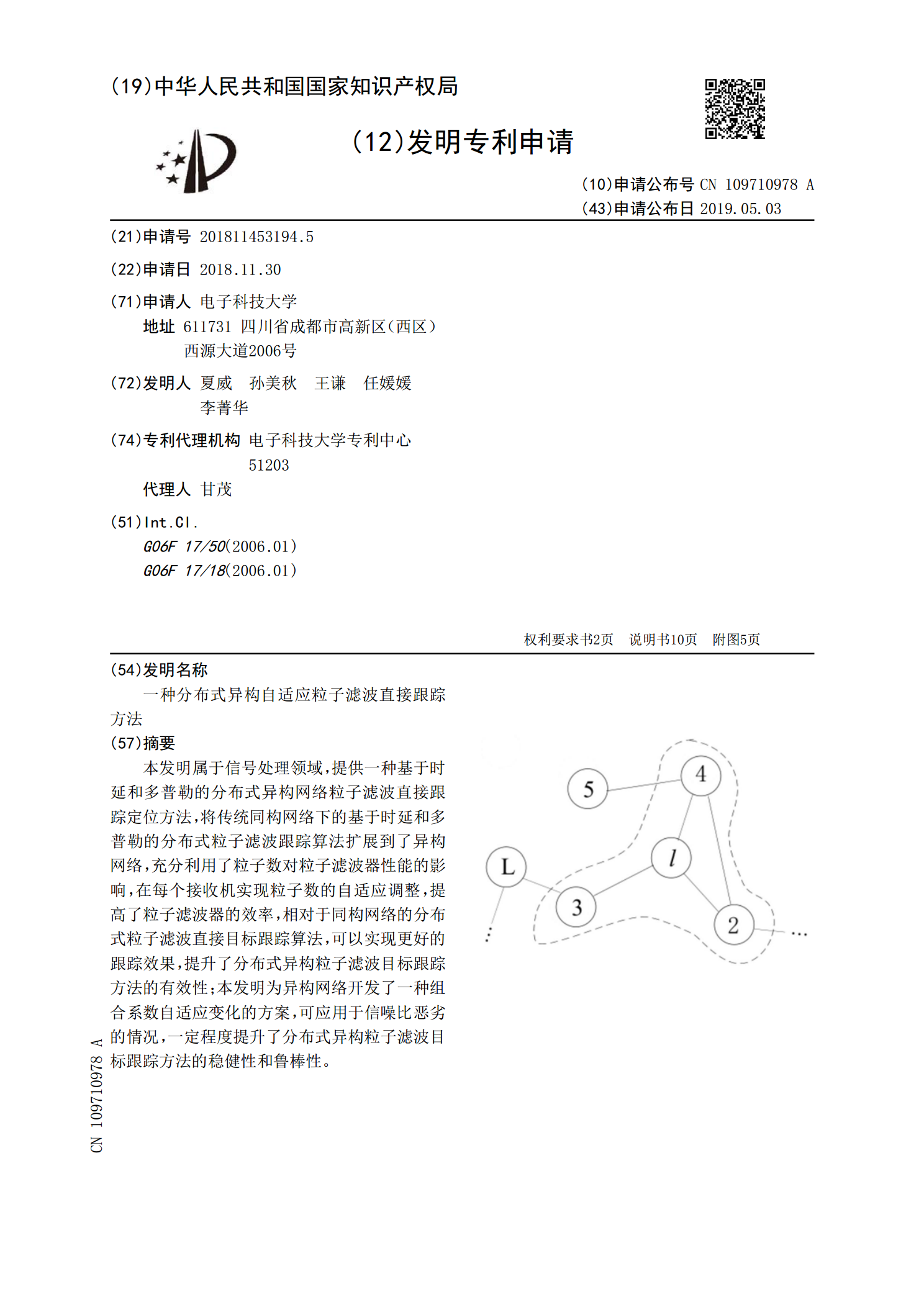
本发明属于信号处理领域,提供一种基于时延和多普勒的分布式异构网络粒子滤波直接跟踪定位方法,将传统同构网络下的基于时延和多普勒的分布式粒子滤波跟踪算法扩展到了异构网络,充分利用了粒子数对粒子滤波器性能的影响,在每个接收机实现粒子数的自适应调整,提高了粒子滤波器的效率,相对于同构网络的分布式粒子滤波直接目标跟踪算法,可以实现更好的跟踪效果,提升了分布式异构粒子滤波目标跟踪方法的有效性;本发明为异构网络开发了一种组合系数自适应变化的方案,可应用于信噪比恶劣的情况,一定程度提升了分布式异构粒子滤波目标跟踪方法的稳
一种基于外辐射源时延和多普勒频率的直接定位方法.pdf
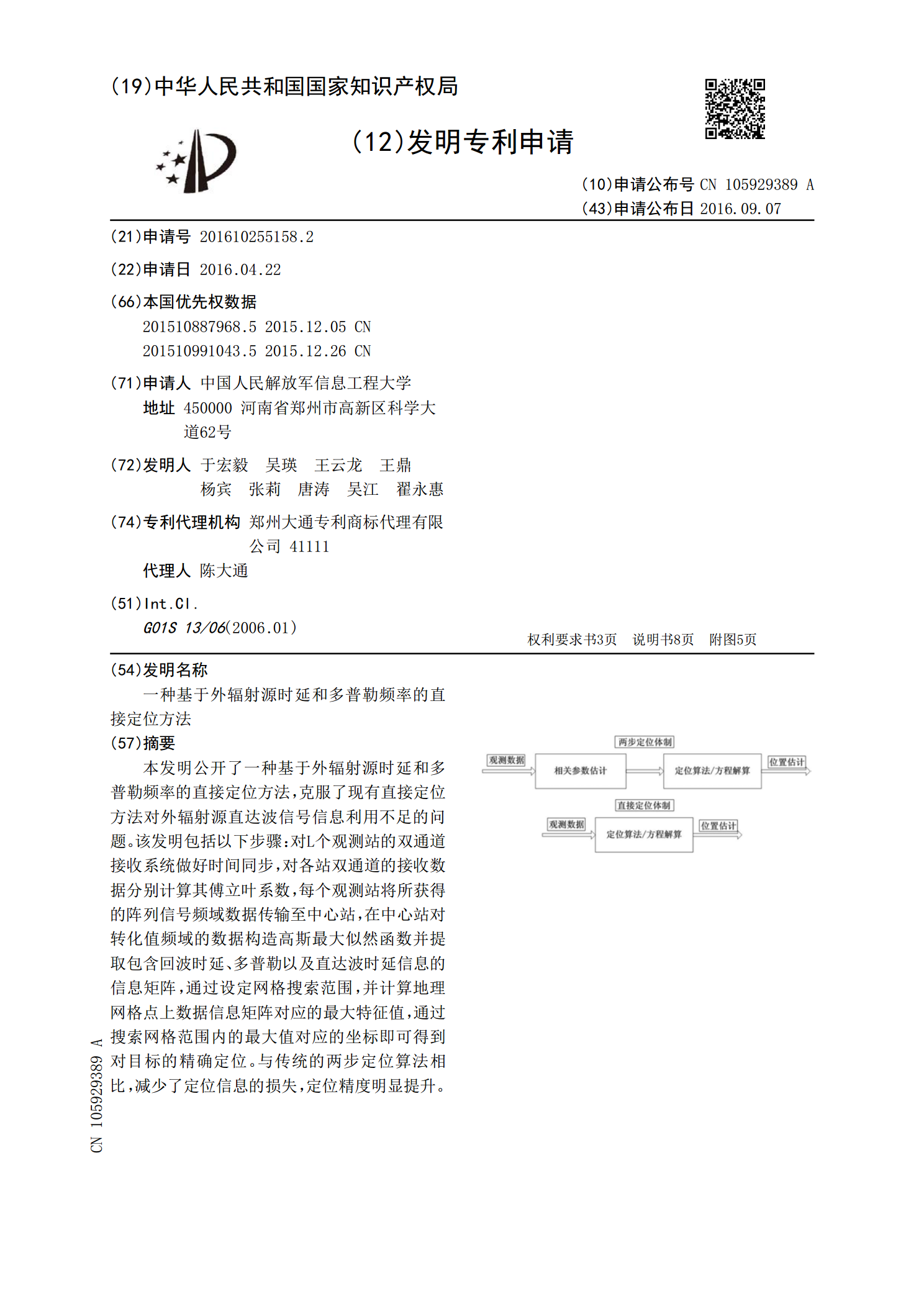
本发明公开了一种基于外辐射源时延和多普勒频率的直接定位方法,克服了现有直接定位方法对外辐射源直达波信号信息利用不足的问题。该发明包括以下步骤:对L个观测站的双通道接收系统做好时间同步,对各站双通道的接收数据分别计算其傅立叶系数,每个观测站将所获得的阵列信号频域数据传输至中心站,在中心站对转化值频域的数据构造高斯最大似然函数并提取包含回波时延、多普勒以及直达波时延信息的信息矩阵,通过设定网格搜索范围,并计算地理网格点上数据信息矩阵对应的最大特征值,通过搜索网格范围内的最大值对应的坐标即可得到对目标的精确定位

一种基于外辐射源时延和多普勒频率的直接定位方法.pdf
本发明公开了一种基于外辐射源时延和多普勒频率的直接定位方法,克服了现有直接定位方法对外辐射源直达波信号信息利用不足的问题。该发明包括以下步骤:对L个观测站的双通道接收系统做好时间同步,对各站双通道的接收数据分别计算其傅立叶系数,每个观测站将所获得的阵列信号频域数据传输至中心站,在中心站对转化值频域的数据构造高斯最大似然函数并提取包含回波时延、多普勒以及直达波时延信息的信息矩阵,通过设定网格搜索范围,并计算地理网格点上数据信息矩阵对应的最大特征值,通过搜索网格范围内的最大值对应的坐标即可得到对目标的精确定位
一种分布式可变扩散组合系数粒子滤波直接跟踪方法.pdf
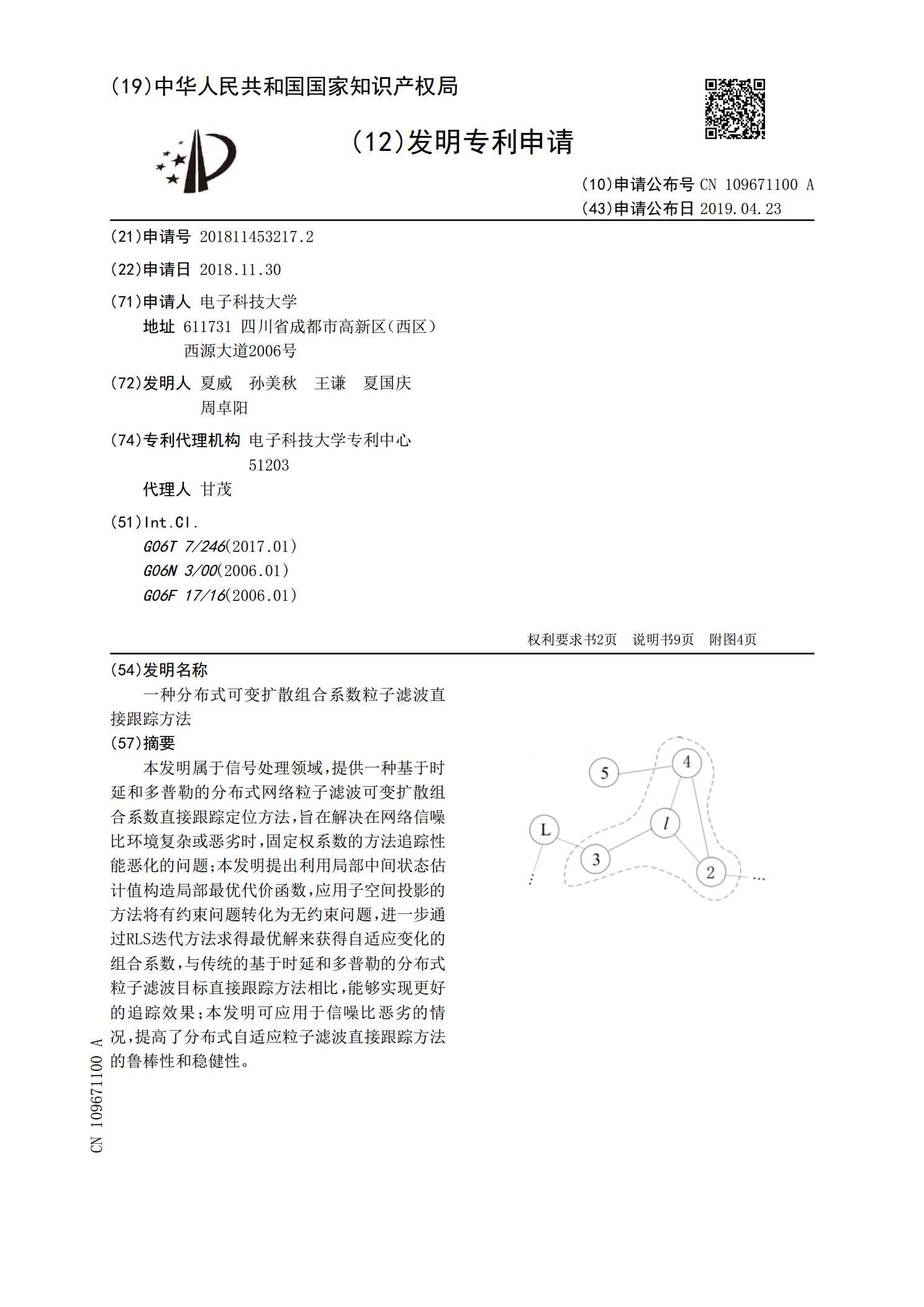
本发明属于信号处理领域,提供一种基于时延和多普勒的分布式网络粒子滤波可变扩散组合系数直接跟踪定位方法,旨在解决在网络信噪比环境复杂或恶劣时,固定权系数的方法追踪性能恶化的问题;本发明提出利用局部中间状态估计值构造局部最优代价函数,应用子空间投影的方法将有约束问题转化为无约束问题,进一步通过RLS迭代方法求得最优解来获得自适应变化的组合系数,与传统的基于时延和多普勒的分布式粒子滤波目标直接跟踪方法相比,能够实现更好的追踪效果;本发明可应用于信噪比恶劣的情况,提高了分布式自适应粒子滤波直接跟踪方法的鲁棒性和稳