
一种深海目标被动定位及粒子滤波跟踪方法.pdf

雨巷****凝海


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种深海目标被动定位及粒子滤波跟踪方法.pdf
本发明提供了一种深海目标被动定位及粒子滤波跟踪方法,在类似于深海分布式垂直阵组网观测系统下实现深海目标被动定位及跟踪功能,主要利用的技术手段有宽/窄带检测及特征提取、声线逆推估距、改进的粒子滤波,相比于传统的匹配场处理、运动目标分析、几何定位法等被动目标定位技术。本发明对环境参数的要求较低,估计精度较高,且适用于静止且无水平测向能力的单节点构成的分布式系统中,仅通过目标俯仰角信息、目标多普勒信息,结合多节点的系统参数和声速剖面采集数据,即可得到对被动目标声源的实时定位与连续跟踪。该方法实现相对简单、对条件
一种基于粒子滤波的视频多目标跟踪方法.pdf
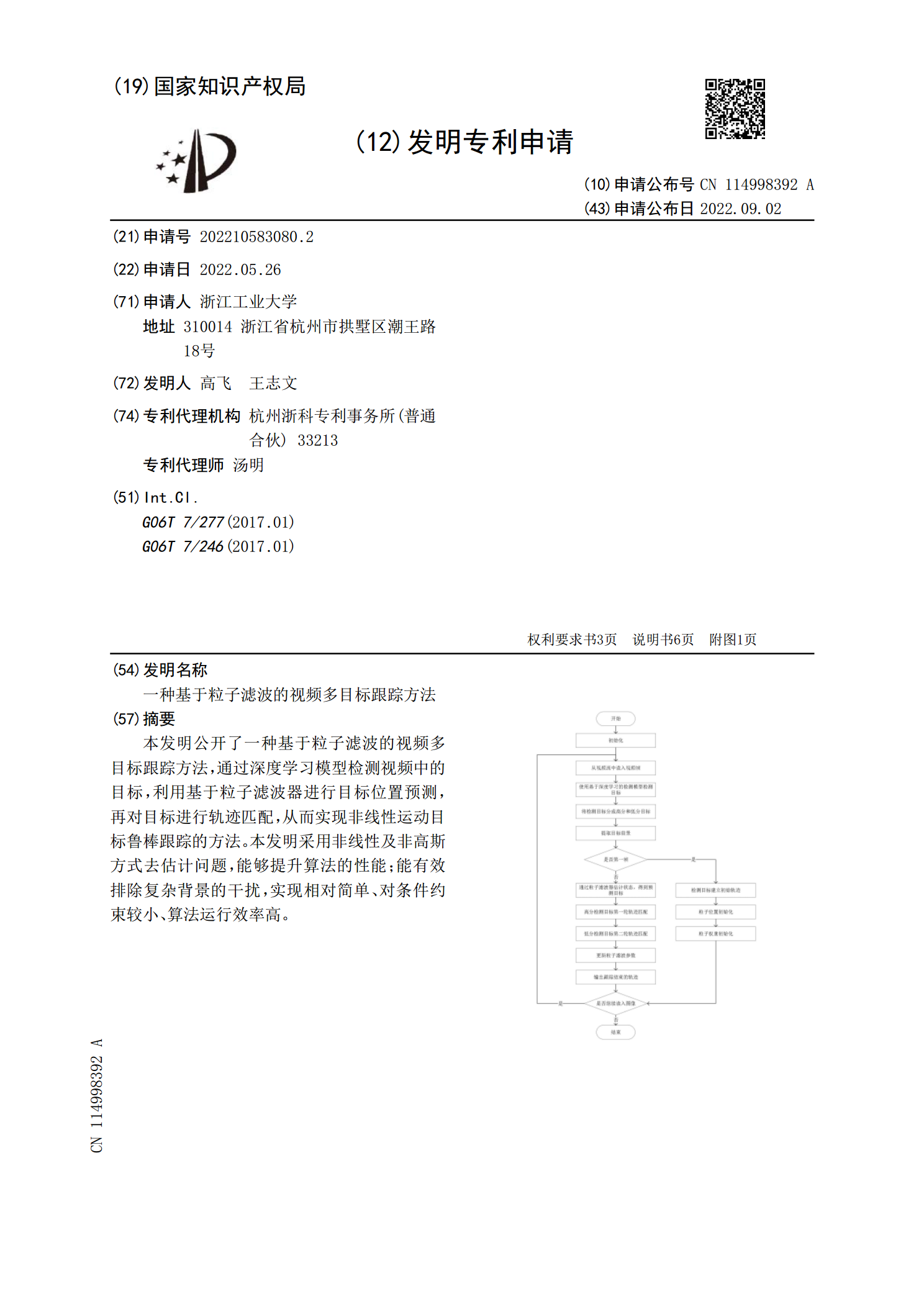
本发明公开了一种基于粒子滤波的视频多目标跟踪方法,通过深度学习模型检测视频中的目标,利用基于粒子滤波器进行目标位置预测,再对目标进行轨迹匹配,从而实现非线性运动目标鲁棒跟踪的方法。本发明采用非线性及非高斯方式去估计问题,能够提升算法的性能;能有效排除复杂背景的干扰,实现相对简单、对条件约束较小、算法运行效率高。

基于粒子滤波的机器人定位及目标跟踪的中期报告.docx
基于粒子滤波的机器人定位及目标跟踪的中期报告一、研究背景机器人定位和目标跟踪是机器人导航和自主控制中的重要问题。传统的定位算法和跟踪算法往往面临环境复杂、噪声干扰、多目标等多个挑战,因此需要采用更为高效和精确的方法来解决这些问题。粒子滤波是一种基于概率理论的自适应滤波技术,可以用于解决机器人定位和目标跟踪的问题。二、研究内容1.粒子滤波基本原理粒子滤波是一种基于贝叶斯定理和蒙特卡洛方法的滤波技术。它通过大量的随机粒子来描述概率分布,并利用这些粒子来估计目标状态以及未知参数等信息。在粒子滤波中,粒子的数量是

一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法.pdf
本发明公开了一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法,该方法在跟踪环节中,对已经跟踪完成且pb大于给定阈值的目标,按粒子权重值大小对跟踪粒子群按逆序进行排序,计算其前N/50个粒子的状态均值。以此状态均值为中心点,产生新的粒子,对跟踪粒子群的后0.98*N个粒子状态信息进行替换,粒子群存在值全置为1,保留了优质粒子,更新了粒子群,提高了粒子使用率,使跟踪点迹较快靠近真实目标,提高了目标的跟踪精度。此外,使虚假点迹更快接近真实目标,通过计算目标踪航迹长度len

一种基于粒子滤波的PTZ自动跟踪目标的方法.pdf
本发明公开了一种基于粒子滤波的PTZ自动跟踪目标的方法,包括以下步骤:运动目标检测,目标跟踪,云台控制,可实现摄像机自动锁定运动目标并进行视觉导向的自动跟踪,弥补固定摄像机监控视野狭窄的缺点。首先在预置位进行手动框选运动目标或利用视觉一致性算法进行运动目标的自动检测,利用经典粒子滤波进行目标位置的匹配跟踪,最后根据目标的位置和大小发送控制命令对摄像机的位置和焦距进行调整。当跟踪失败后,自动跳回到预置位,进行下一轮的检测。本发明设计合理,实现了摄像机对目标的自动跟踪功能,保证了目标始终处于镜头的中间位置,为