
一种基于粒子滤波的视频多目标跟踪方法.pdf

玄静****写意

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于粒子滤波的视频多目标跟踪方法.pdf
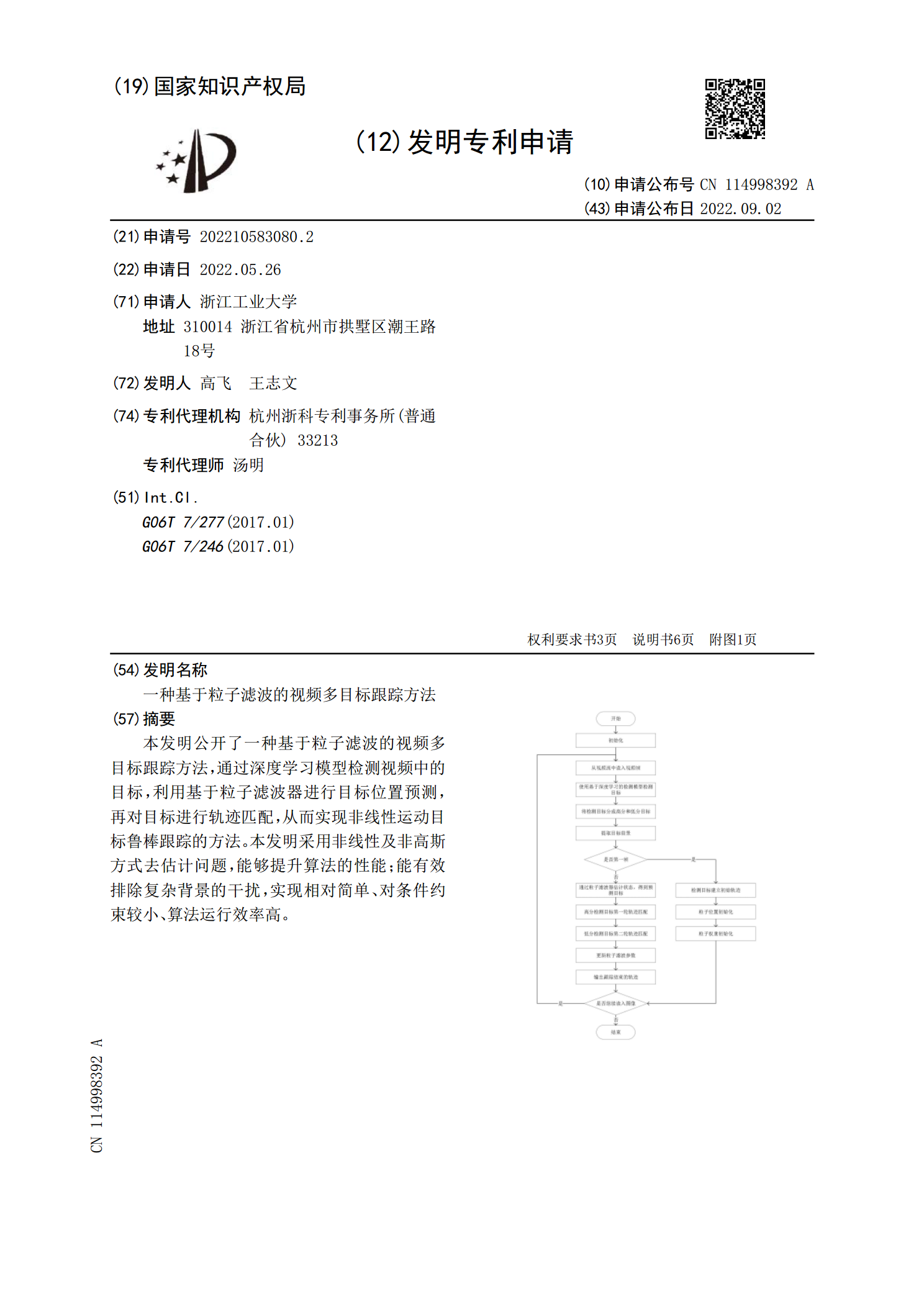
本发明公开了一种基于粒子滤波的视频多目标跟踪方法,通过深度学习模型检测视频中的目标,利用基于粒子滤波器进行目标位置预测,再对目标进行轨迹匹配,从而实现非线性运动目标鲁棒跟踪的方法。本发明采用非线性及非高斯方式去估计问题,能够提升算法的性能;能有效排除复杂背景的干扰,实现相对简单、对条件约束较小、算法运行效率高。

基于混合粒子PHD滤波的多目标视频跟踪.docx
基于混合粒子PHD滤波的多目标视频跟踪基于混合粒子PHD滤波的多目标视频跟踪摘要多目标视频跟踪是计算机视觉领域的一个重要研究方向,其在实际应用中具有广泛的意义。本文提出了一种基于混合粒子PHD滤波的多目标视频跟踪算法,该算法可以准确跟踪视频中的多个目标,并对目标进行有效的识别和追踪。本文首先介绍了混合粒子PHD滤波算法的原理和方法,然后详细描述了多目标视频跟踪算法的设计和实现过程。最后通过实验验证了该算法的性能和有效性,结果表明该算法对于多目标视频跟踪问题具有较好的效果。关键词:多目标视频跟踪、混合粒子P

基于粒子滤波的视频跟踪.doc
摘要针对传统的Kalman滤波器在非线性非高斯环境下对运动目标的跟踪效果较差这一问题,本文提出了一种基于粒子滤波的目标跟踪方法。粒子滤波是采用一些带有权值的随机样本(粒子)来表示所需要的后验概率密度,而不是采用传统的线性变换,从而得到基于物理模型的近似最优数值解,具有精度高、收敛速度快等特点。基于粒子滤波的目标跟踪原理是通过这些粒子的加权来估计目标运动的状态。目标模型的仿真实验表明,在非线性非高斯环境下,粒子滤波的跟踪效果优于扩展卡尔曼滤波器。最后,将粒子滤波运用于视频跟踪,实验结果进一步说

基于粒子滤波的视频目标跟踪方法研究.docx
基于粒子滤波的视频目标跟踪方法研究基于粒子滤波的视频目标跟踪方法研究摘要:目标跟踪在计算机视觉领域中具有重要的应用价值。为了提高视频目标跟踪的准确性和稳定性,本文提出了一种基于粒子滤波的视频目标跟踪方法。该方法通过利用粒子滤波的特性对目标进行建模和预测,同时使用观测模型来更新目标的位置。实验证明,该方法能够有效地跟踪目标并且具有较高的定位精度。关键词:视频目标跟踪、粒子滤波、观测模型、建模和预测、定位精度1.引言目标跟踪作为计算机视觉领域的一个重要研究方向,一直以来都是学术界和工业界的关注焦点。它在视频监

一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法.pdf
本发明公开了一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法,该方法在跟踪环节中,对已经跟踪完成且pb大于给定阈值的目标,按粒子权重值大小对跟踪粒子群按逆序进行排序,计算其前N/50个粒子的状态均值。以此状态均值为中心点,产生新的粒子,对跟踪粒子群的后0.98*N个粒子状态信息进行替换,粒子群存在值全置为1,保留了优质粒子,更新了粒子群,提高了粒子使用率,使跟踪点迹较快靠近真实目标,提高了目标的跟踪精度。此外,使虚假点迹更快接近真实目标,通过计算目标踪航迹长度len