
一种雷达微多普勒测量系统及方法.pdf

一吃****福乾


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种雷达微多普勒测量系统及方法.pdf
本发明涉及一种雷达微多普勒测量系统及方法,其系统包括雷达分系统和终端分系统,雷达分系统与终端分系统电连接;雷达分系统,用于发射雷达信号,接收雷达信号的回波信号,并对回波信号进行第一级信号处理,生成目标数据信息;终端分系统,用于控制雷达分系统的系统参数,还用于对目标数据信息进行第二级信号处理,完成对微动目标的检测,得到微多普勒特征参数。本发明的雷达微多普勒测量系统及方法,通过发射雷达信号感知微动目标,实现对微动目标进行探测,能够适应恶劣的工作环境,可全天时、全天候对微动目标的微多普勒特征进行测量。

一种多普勒雷达微运动目标检测方法及系统.pdf
本公开公开了一种多普勒雷达微运动目标检测方法及系统,包括采集静止目标的回波信号,对其进行多普勒滤波处理得到多普勒数据;对多普勒数据进行频段划分,得到第一频段和第二频段,将第一频段和第二频段的多普勒数据分别进行累加得到第一多普勒数据和第二多普勒数据;对第一多普勒数据和第二多普勒数据的比值进行阈值检测,得到静止目标是否进行微运动的检测结果。利用微运动目标所产生的多普勒频率相对较低的特点进行检测,并通过与高多普勒频率数据进行对比,使目标更突出,避免了噪声较大时,以绝对值进行判断所带来的错误,减少了环境噪声的影响

一种多普勒雷达目标检测方法及系统.pdf
本公开提出了一种多普勒雷达目标检测方法及系统,方法包括:对获取的回波数据,进行距离向傅立叶变换得到频域矩阵数据B;调整多普勒滤波和求模先后顺序获得第一多普勒矩阵C和第二多普勒矩阵E;计算第一多普勒谱C与第二多普勒谱E的差值,获得第二矩阵F;针对第二矩阵F依次进行赋值和同一距离向上的累加操作,获得数列G;对于数列G,当数列G的项峰值大于设定的阈值时,判定为有目标。通过对采集的回波信号通过不同顺序的多普勒滤波和求模获得不同的矩阵,从而去除幅度抖动,在运动目标的检测中减少了强反射静目标的影响,有效提高了目标检测

一种多普勒雷达目标判定方法及系统.pdf
本公开提出了一种多普勒雷达目标判定方法及系统,包括如下步骤:获取多普勒雷达的回波信号数据;根据获取的回波信号数据,获得多普勒累加数列A,多普勒累加数列A中的数据为多普勒数据每个距离向上的累加值;设定幅度阈值P,将数列A中的数据与幅度阈值P比较,获得比较结果;设置目标宽度阈值Q,比较结果中数列A中的数据大于幅度阈值P的连续个数大于目标宽度阈值Q,判定为有目标;否则,判定为无目标。本公开针对检测目标的回波数据从幅度与宽度两个维度上的判断,能够有效剔除虚假目标,提高目标判断的准确性,能够有效减少目标检测时虚假目
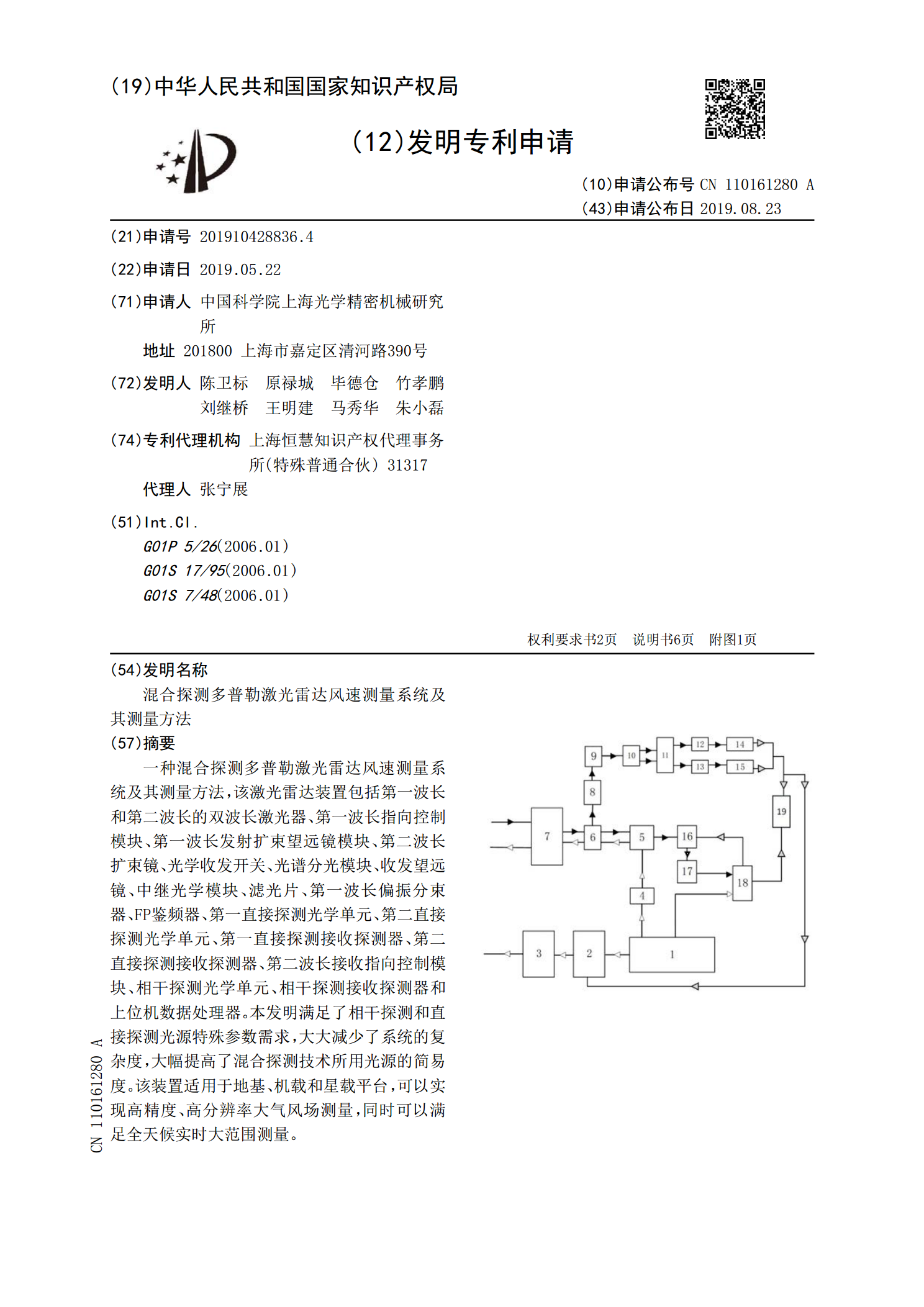
混合探测多普勒激光雷达风速测量系统及其测量方法.pdf
一种混合探测多普勒激光雷达风速测量系统及其测量方法,该激光雷达装置包括第一波长和第二波长的双波长激光器、第一波长指向控制模块、第一波长发射扩束望远镜模块、第二波长扩束镜、光学收发开关、光谱分光模块、收发望远镜、中继光学模块、滤光片、第一波长偏振分束器、FP鉴频器、第一直接探测光学单元、第二直接探测光学单元、第一直接探测接收探测器、第二直接探测接收探测器、第二波长接收指向控制模块、相干探测光学单元、相干探测接收探测器和上位机数据处理器。本发明满足了相干探测和直接探测光源特殊参数需求,大大减少了系统的复杂度,