
一种基于仿生偏振的水下组合导航系统.pdf

曦晨****22


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于仿生偏振的水下组合导航系统.pdf
本发明公开了一种基于仿生偏振的水下组合导航系统,包括水下仿生偏振模块,多普勒计程仪模块,惯性辅助模块,健康监测模块,水下导航信息控制处理器,存储模块,通信模块、电源模块以及接口电路。其中,水下仿生偏振模块采集偏振图像并解算导航信息;多普勒计程仪模块利用多普勒原理估计水下载体三维绝对速度;惯性辅助模块提供水下载体的位姿信息;健康监测模块能够实时监测系统健康;水下导航信息控制处理器负责信息融合处理。本发明基于自然界生物偏振感知特性和声多普勒效应实现仿生自主导航,能够为水下载体提供高可靠的位姿信息,适用于陌生海

基于卫星INS的仿生机器鱼组合导航系统.pptx
汇报人:CONTENTS添加章节标题仿生机器鱼导航系统概述仿生机器鱼导航系统的定义仿生机器鱼导航系统的应用场景仿生机器鱼导航系统的研究现状基于卫星INS的仿生机器鱼组合导航系统原理INS/GPS组合导航系统原理INS/GPS组合导航系统优势INS/GPS组合导航系统在仿生机器鱼中的应用仿生机器鱼组合导航系统硬件设计INS/GPS组合导航模块设计传感器模块设计控制模块设计电源模块设计仿生机器鱼组合导航系统软件设计INS/GPS组合导航算法设计传感器数据处理算法设计控制算法设计通信协议设计仿生机器鱼组合导航系
一种基于偏振信息的组合导航系统递推优化初始对准方法.pdf
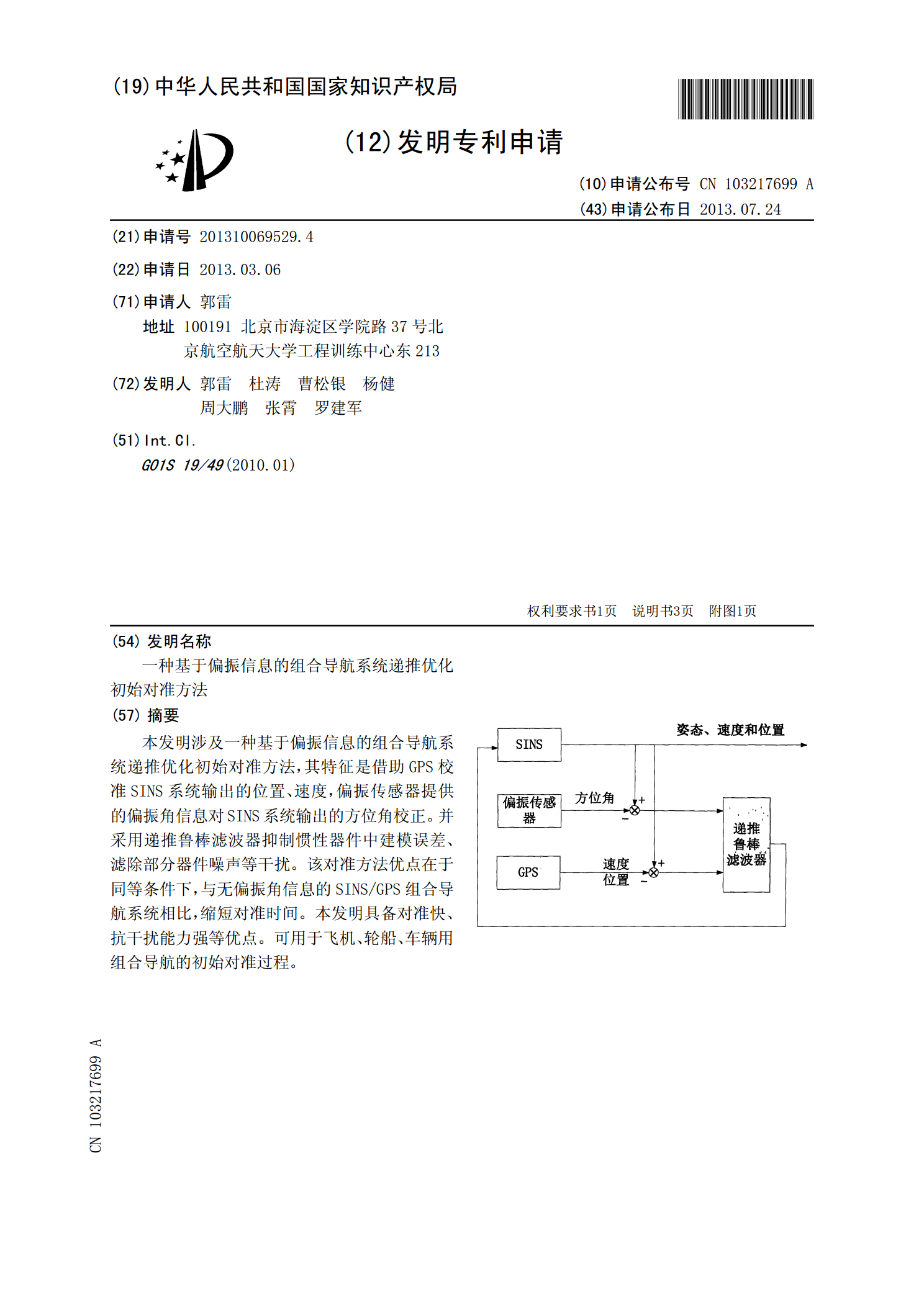
本发明涉及一种基于偏振信息的组合导航系统递推优化初始对准方法,其特征是借助GPS校准SINS系统输出的位置、速度,偏振传感器提供的偏振角信息对SINS系统输出的方位角校正。并采用递推鲁棒滤波器抑制惯性器件中建模误差、滤除部分器件噪声等干扰。该对准方法优点在于同等条件下,与无偏振角信息的SINS/GPS组合导航系统相比,缩短对准时间。本发明具备对准快、抗干扰能力强等优点。可用于飞机、轮船、车辆用组合导航的初始对准过程。

一种基于仿生的水下探测器.pdf
本发明公开的一种基于仿生的水下探测器,包括机体,所述机体内设有动力装置,所述动力装置左侧可啮合的连接有探测装置,通过所述动力装置可驱动所述探测装置进行探测,所述动力装置右侧连接有脱离装置,当有海洋生物威胁到探测器时,通过所述脱离装置可抛出引诱剂,本发明可通过人为遥控来控制探测器,而且同时对海底环境以及探测器周围环境进行探测监控,避免探测器突然被海洋生物吞食,当有海洋生物对探测器有威胁时,探测器可将引诱剂脱离出来并加速逃离,基于蜥蜴等生物的逃生特性,引诱剂可吸引海洋生物并可被消化降解,不会威胁到海洋环境以及
一种基于偏振光/惯性/视觉组合导航的水下同步定位与建图方法.pdf
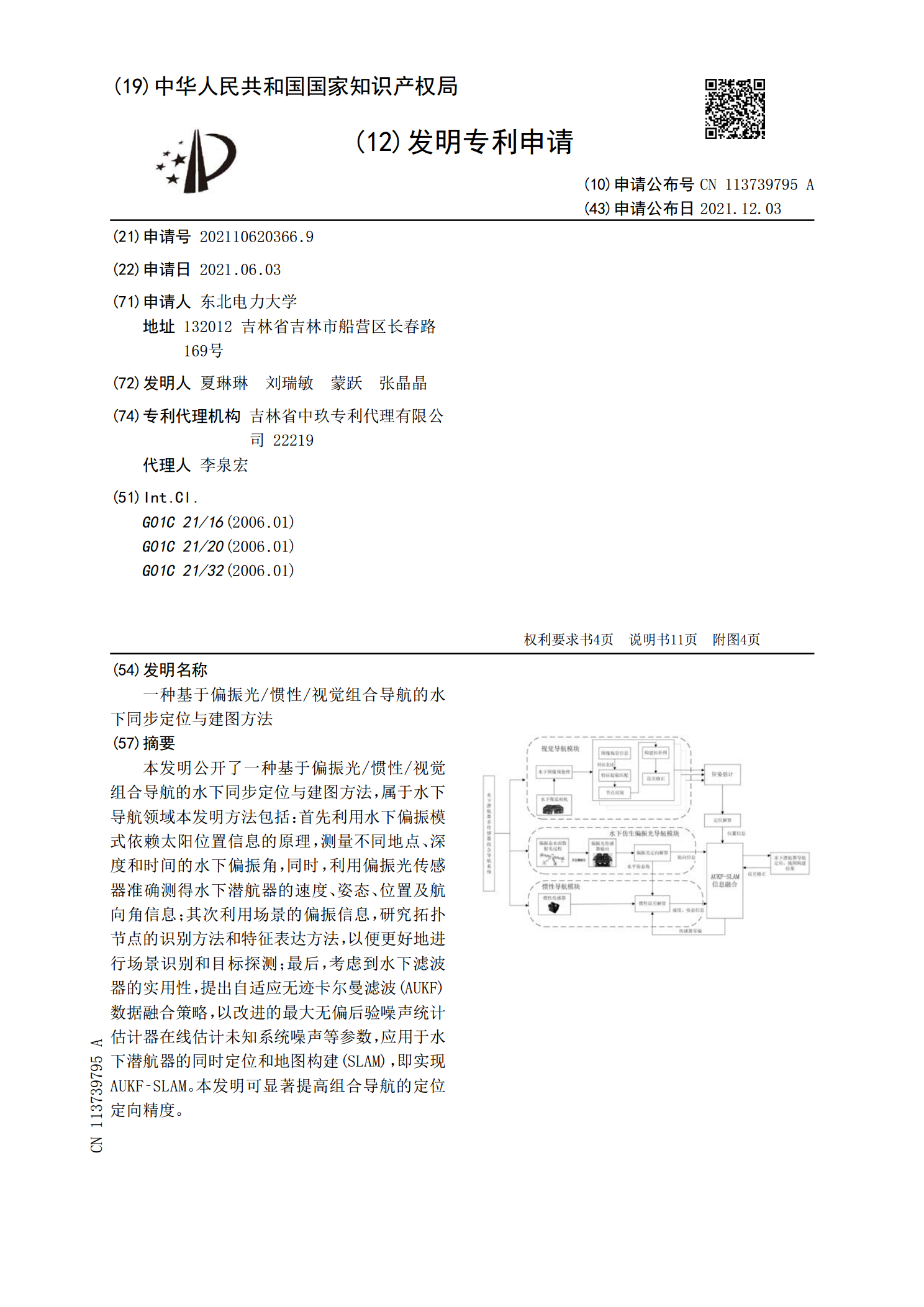
本发明公开了一种基于偏振光/惯性/视觉组合导航的水下同步定位与建图方法,属于水下导航领域本发明方法包括:首先利用水下偏振模式依赖太阳位置信息的原理,测量不同地点、深度和时间的水下偏振角,同时,利用偏振光传感器准确测得水下潜航器的速度、姿态、位置及航向角信息;其次利用场景的偏振信息,研究拓扑节点的识别方法和特征表达方法,以便更好地进行场景识别和目标探测;最后,考虑到水下滤波器的实用性,提出自适应无迹卡尔曼滤波(AUKF)数据融合策略,以改进的最大无偏后验噪声统计估计器在线估计未知系统噪声等参数,应用于水下潜