
一种基于偏振光/惯性/视觉组合导航的水下同步定位与建图方法.pdf

一只****ua

1/10
2/10

3/10

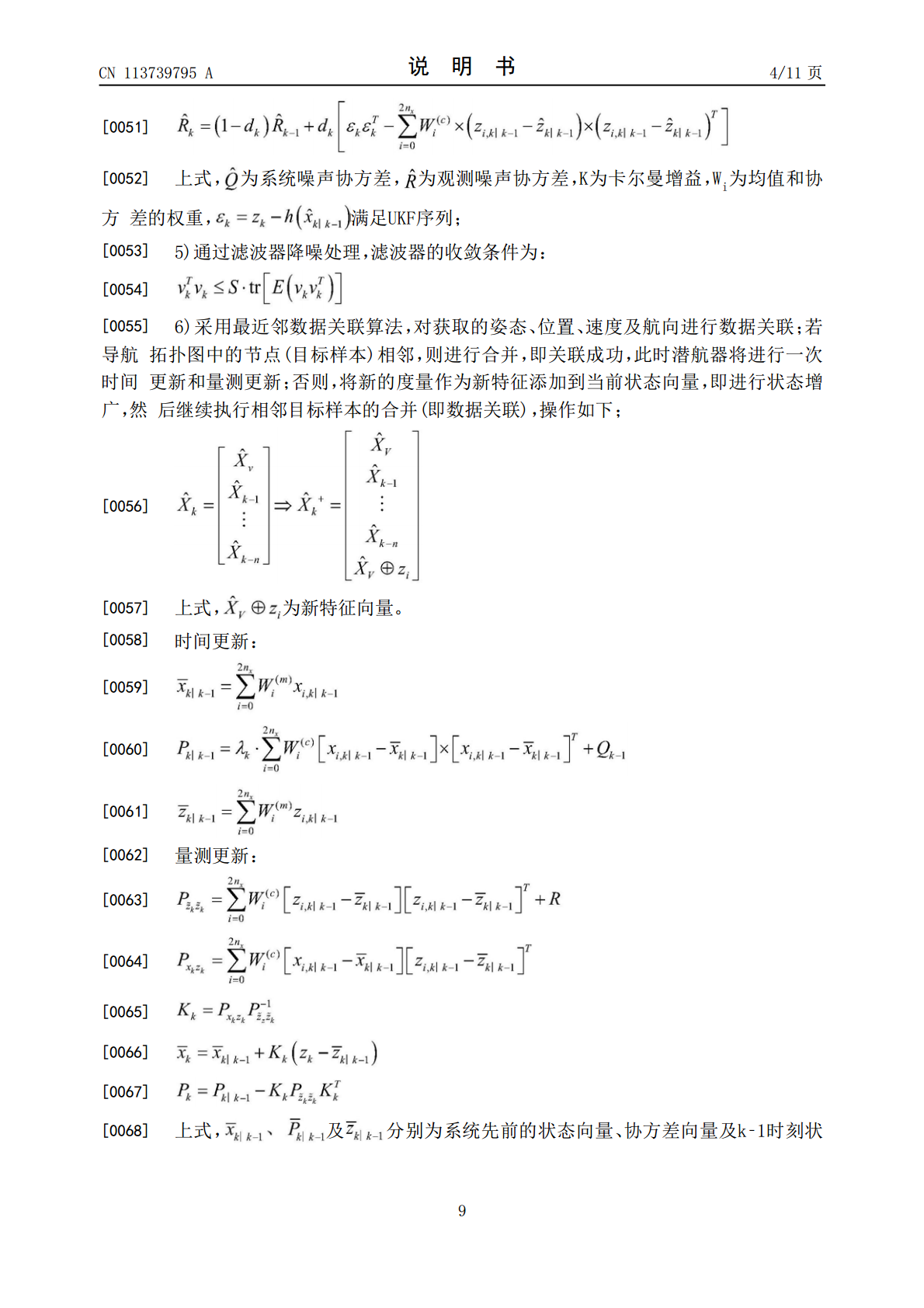
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于偏振光/惯性/视觉组合导航的水下同步定位与建图方法.pdf
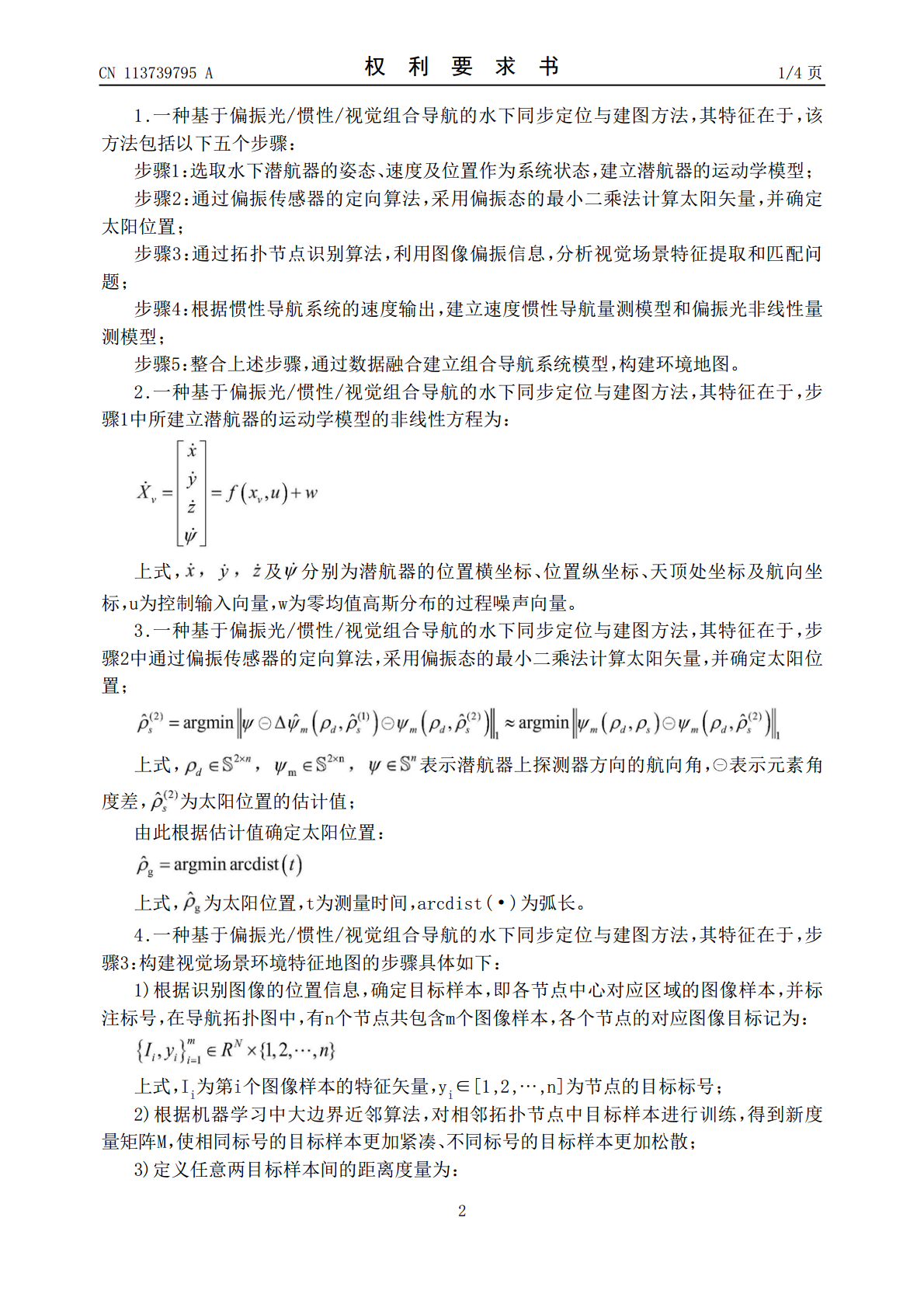
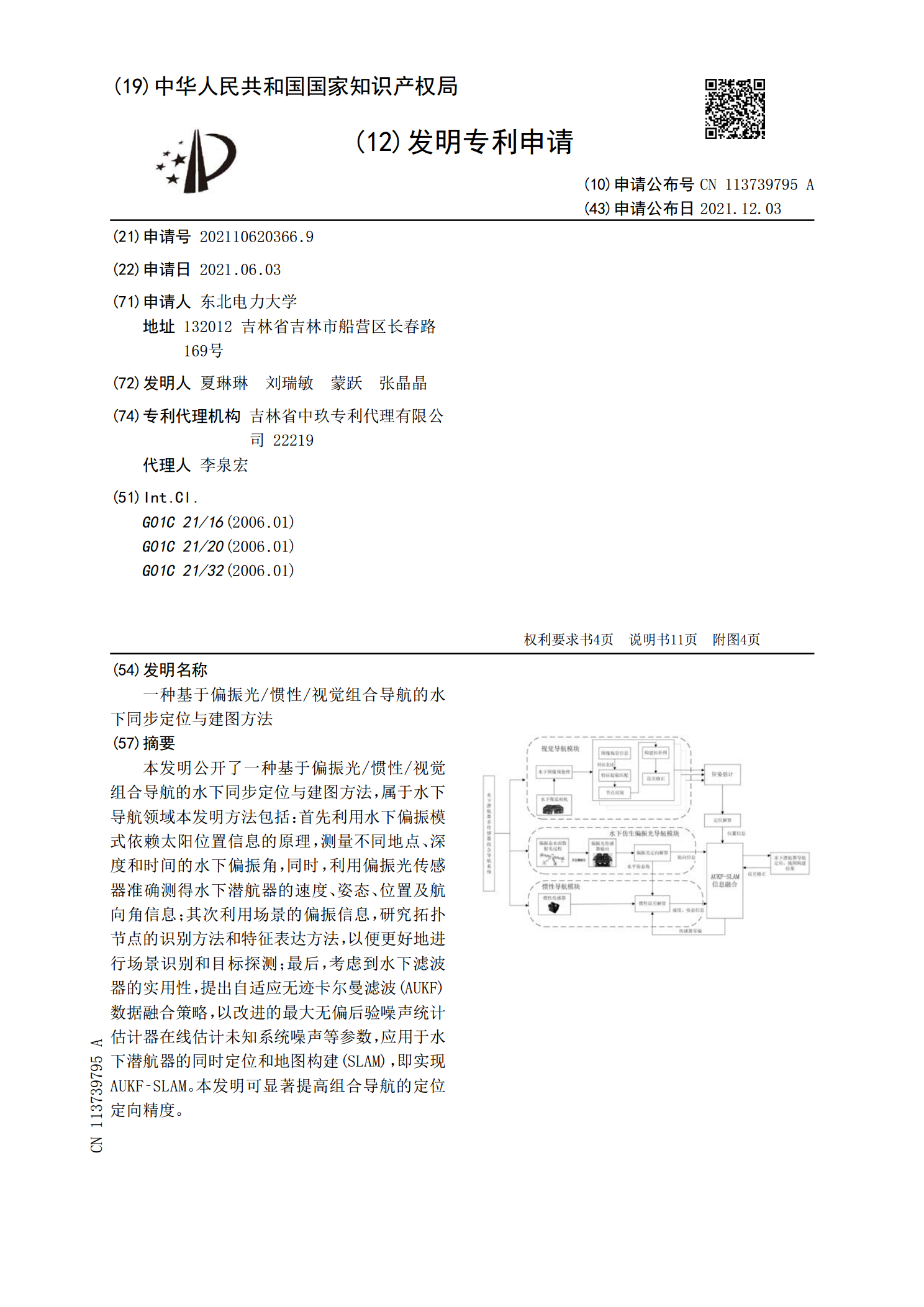
本发明公开了一种基于偏振光/惯性/视觉组合导航的水下同步定位与建图方法,属于水下导航领域本发明方法包括:首先利用水下偏振模式依赖太阳位置信息的原理,测量不同地点、深度和时间的水下偏振角,同时,利用偏振光传感器准确测得水下潜航器的速度、姿态、位置及航向角信息;其次利用场景的偏振信息,研究拓扑节点的识别方法和特征表达方法,以便更好地进行场景识别和目标探测;最后,考虑到水下滤波器的实用性,提出自适应无迹卡尔曼滤波(AUKF)数据融合策略,以改进的最大无偏后验噪声统计估计器在线估计未知系统噪声等参数,应用于水下潜

基于视觉和惯性导航的水下机器人组合定位设计.docx
基于视觉和惯性导航的水下机器人组合定位设计水下机器人作为一种重要的水下探测工具,在海洋探测、水下安全监测、沉船捞取等多个领域发挥着重要作用。而水下机器人面临的最大问题之一就是精准的定位问题。为了解决这个问题,本文开展了基于视觉和惯性导航的水下机器人组合定位设计的研究。一、水下机器人组合定位技术介绍组合定位技术是指将多种定位方式结合起来,得到更加准确的定位结果。在水下机器人定位中,常见的组合定位方式是基于视觉和惯性导航。其中,视觉定位是利用相机获取水下场景的信息,利用计算机算法实现水下机器人的定位。惯性导航
基于视觉和惯性导航的水下机器人组合定位设计.pdf
基于视觉和惯性导航的水下机器人组合定位设计一、本文概述随着海洋资源的日益开发和水下探索需求的不断增加,水下机器人的定位技术成为了研究的热点。水下环境的复杂性和不确定性使得单一的定位方法往往难以满足实际需求,因此,结合多种传感器信息进行组合定位成为了提高水下机器人定位精度和稳定性的重要手段。本文旨在探讨基于视觉和惯性导航的水下机器人组合定位设计,通过深入研究视觉感知、惯性导航以及两者之间的融合算法,为水下机器人的精确定位提供新的解决方案。本文将首先介绍水下机器人定位技术的研究背景和意义,分析当前国内外的研究

基于视觉和惯性导航的水下机器人组合定位设计的开题报告.docx
基于视觉和惯性导航的水下机器人组合定位设计的开题报告一、开题背景水下机器人是一种用于探索海洋、进行海洋资源勘探、海洋工程施工及维护、水下科学研究等领域的重要装备,随着海洋技术的不断发展和深入应用,水下机器人的应用领域也逐渐拓宽。对于水下机器人而言,组合定位是其实现精准控制、完成复杂任务的基础,因此组合定位技术的研究一直备受关注。视觉和惯性导航是目前组合定位技术中使用较为广泛的一种方法,视觉可以提供水下机器人在水下环境中的位置和姿态信息,而惯性导航则可以提供其速度和加速度等信息。这两种方法互补性强,可以实现

基于视觉和惯性导航的水下机器人组合定位设计的中期报告.docx
基于视觉和惯性导航的水下机器人组合定位设计的中期报告一、研究背景随着科技的发展和人类对水下资源的重视,水下机器人的应用越来越广泛。水下机器人的定位技术是保障其工作效率和应用效果的基础,而组合定位技术是当前水下机器人定位技术的主流。组合定位技术可将多种定位信息综合利用,弥补单一定位技术的不足,提高定位精度和可靠性。目前,组合定位技术主要包括惯性导航、声纳定位、视觉导航等多种形式。其中,惯性导航和视觉导航是较为常用的两种技术,它们能够提供连续性的测量信息,并且具有相对较低的误差,因此被广泛应用于水下机器人的定