
一种基于偏振信息的组合导航系统递推优化初始对准方法.pdf

秀华****魔王


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于偏振信息的组合导航系统递推优化初始对准方法.pdf
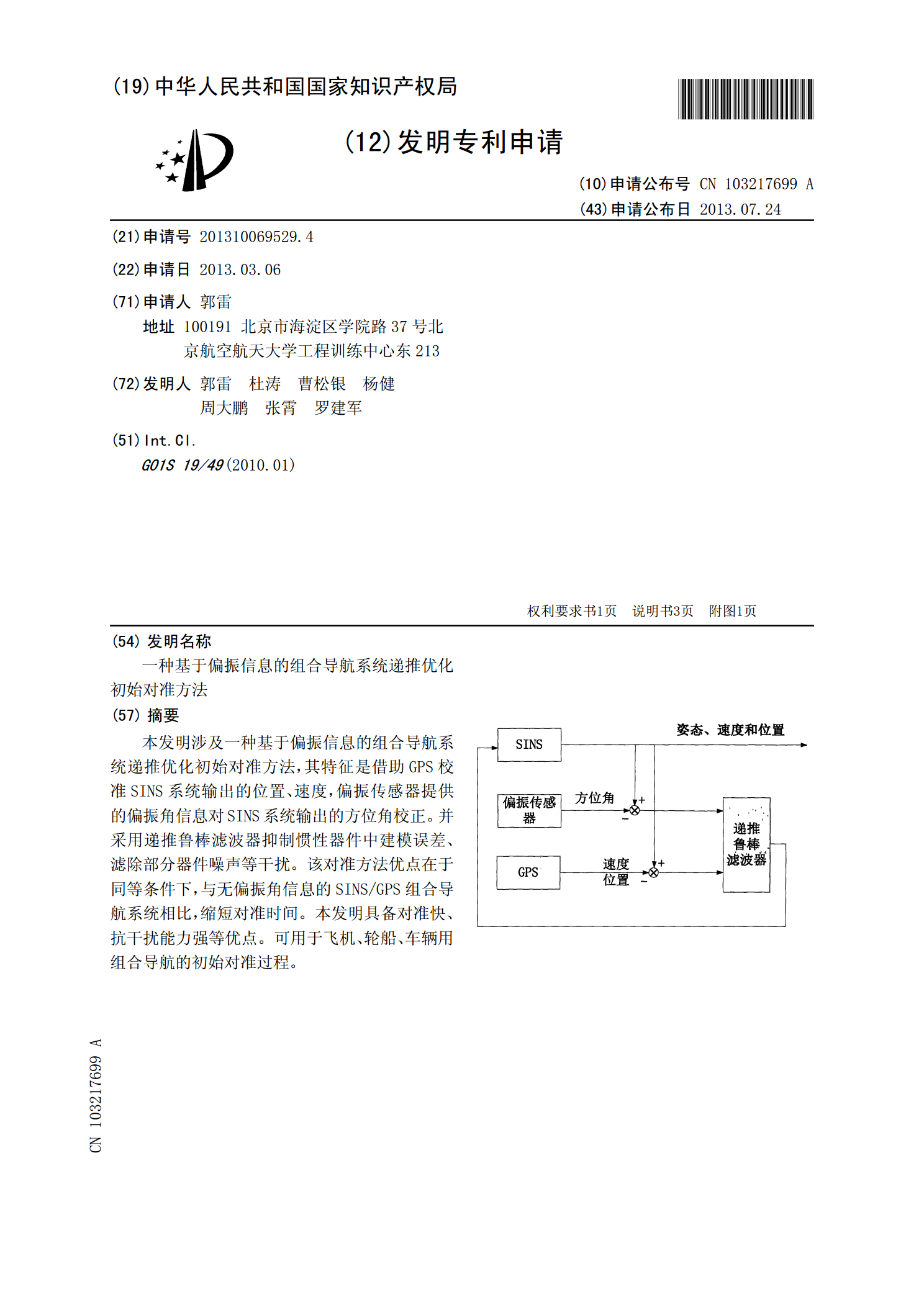
本发明涉及一种基于偏振信息的组合导航系统递推优化初始对准方法,其特征是借助GPS校准SINS系统输出的位置、速度,偏振传感器提供的偏振角信息对SINS系统输出的方位角校正。并采用递推鲁棒滤波器抑制惯性器件中建模误差、滤除部分器件噪声等干扰。该对准方法优点在于同等条件下,与无偏振角信息的SINS/GPS组合导航系统相比,缩短对准时间。本发明具备对准快、抗干扰能力强等优点。可用于飞机、轮船、车辆用组合导航的初始对准过程。

基于小波神经网络的组合导航系统初始对准技术.docx
基于小波神经网络的组合导航系统初始对准技术一、引言组合导航系统是一种集成多种导航信号和导航技术的系统,它能够提供高精度、高可靠的定位、导航和定向服务。组合导航系统通常会使用传感器、卫星导航系统和其他辅助导航系统进行位置估计。其中,初始对准技术是组合导航系统中的重要部分,它能够很好地改善组合导航系统性能。本文介绍一种基于小波神经网络的组合导航系统初始对准技术。二、组合导航系统初始对准技术1.组合导航系统中的初始对准技术组合导航系统需要多个传感器协同工作才能实现位置估计,但是这些传感器之间的误差会导致系统产生

GNSSINS组合导航系统初始对准及其故障修复研究.pptx
GNSSINS组合导航系统初始对准及其故障修复研究目录GNSSINS组合导航系统概述定义和组成工作原理和特点应用领域GNSSINS组合导航系统初始对准技术初始对准的必要性初始对准的方法和流程算法优化和改进GNSSINS组合导航系统故障修复技术故障诊断和分类故障修复方法和流程故障预防和预测GNSSINS组合导航系统性能评估评估指标和方法实验验证和分析结果比较和讨论GNSSINS组合导航系统未来发展展望技术发展趋势和挑战未来发展方向和重点跨领域合作和创新感谢观看
基于机器学习的捷联惯性导航系统的初始对准方法研究.pptx
汇报人:CONTENTSPARTONEPARTTWO捷联惯性导航系统简介初始对准的重要性和挑战研究目的与意义PARTTHREE传统初始对准方法研究基于机器学习的初始对准方法研究研究现状与存在问题PARTFOUR方法概述关键技术实现实验设计与验证结果分析与讨论PARTFIVE与传统方法的比较分析方法优势与局限性分析未来改进方向与展望PARTSIX研究成果总结对未来研究的建议与展望汇报人:

一种基于仿生偏振的水下组合导航系统.pdf
本发明公开了一种基于仿生偏振的水下组合导航系统,包括水下仿生偏振模块,多普勒计程仪模块,惯性辅助模块,健康监测模块,水下导航信息控制处理器,存储模块,通信模块、电源模块以及接口电路。其中,水下仿生偏振模块采集偏振图像并解算导航信息;多普勒计程仪模块利用多普勒原理估计水下载体三维绝对速度;惯性辅助模块提供水下载体的位姿信息;健康监测模块能够实时监测系统健康;水下导航信息控制处理器负责信息融合处理。本发明基于自然界生物偏振感知特性和声多普勒效应实现仿生自主导航,能够为水下载体提供高可靠的位姿信息,适用于陌生海