
用于定位车辆轮子的纵向位置的方法和装置.pdf

绮兰****文章

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于定位车辆轮子的纵向位置的方法和装置.pdf
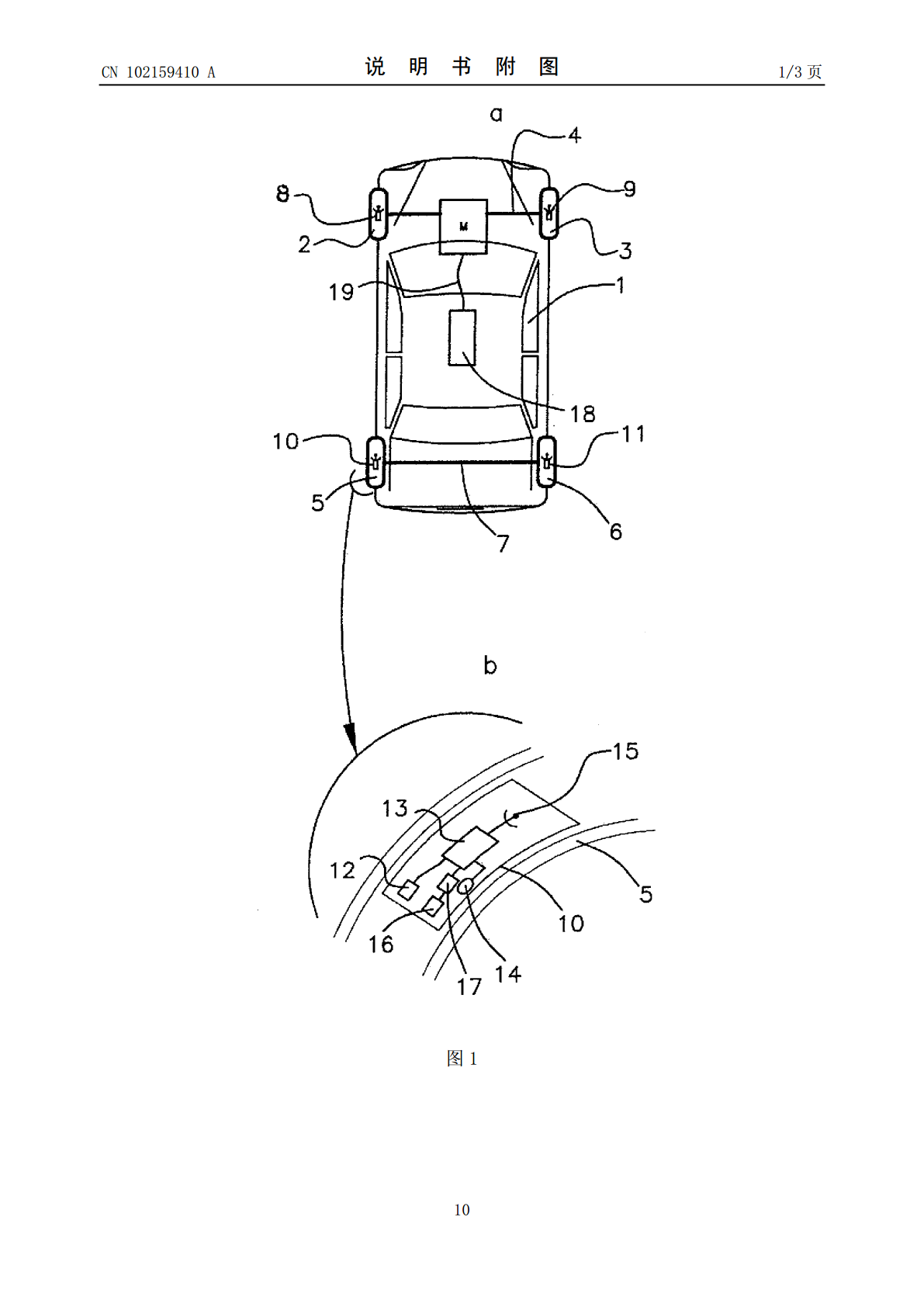
本发明涉及一种用于定位车辆(1)的轮子(2,3,5,6)的纵向位置的方法,根据所述定位方法,为每个轮子配备切向测量传感器(16),所述切向测量传感器适于输出包括载波的测量信号,其中所述载波的振幅和频率随着所述切向测量传感器所遭受的振动冲击而变化。此外,根据本发明,在对应于发动机(M)的爆发频率的频率带中测量所述信号的载波振幅,比较所述信号,以识别其载波对于相同频率具有最大振幅的信号,并且将其载波具有最大振幅的信号所来源的轮子(2,3)确定为对应于安装在驱动轴(4)上的轮子(2,3)。

用于定位车辆轮子的纵向位置的方法.pdf
本发明涉及一种用于定位轮子(2)的纵向位置的方法,所述纵向位置要么在车辆的前桥上要么在后桥上,其中所述轮子配备有电子模块(6),电子模块适于向安装在车辆上的中央单元发射代表每个轮子的工作参数的信号。根据本发明,为每个轮子(2)配备用于测量代表投影在所述轮子平面上的地球磁场模的数值的传感器(16);比较由不同传感器(16)同时测量的、代表每个所述传感器所测量的地球磁场模的变化的数值系列,以揭示所述系列之间的相移;并且将导向轮(2)确定为配备有产生相位超前的数值系列的传感器(16)的轮子。

用于定位车辆轮子的位置的方法.pdf
本发明涉及一种用于定位轮子(4)的位置的方法,其中所述轮子配备有电子模块(8),所述电子模块适于向安装在车辆上的中央单元发射代表每个轮子的工作参数的信号。根据本发明,在给定的时间窗期间,记录车辆的连续移动、方向变化和/或速度变化,以对于每个轮子(4),根据在预先阶段中所记忆的数据来建立对于该连续移动代表所述轮子配有的轮胎的内部温度的理论变化的数值序列。此外,在所述时间窗期间,对于每个轮子(4),测量所述轮子配有的轮胎的内部温度的变化,并且将所测量的数值序列与每个理论数值序列比较,以建立对应关系,所述对应关

用于调节车辆纵向位置的方法和装置.pdf
本发明涉及一种用于调节车辆、尤其是自主驾驶车辆的纵向位置的方法,其中,借助纵向位置调节器(7.1)根据纵向动力学预调理论参数(a_set)并根据纵向动力学调节误差参数(s_err,v_err,a_err)产生纵向加速度调节信号(U_asoll_sum,U_asoll),用以对车辆的驱动装置(9)和制动装置(10)起作用的下级加速度调节单元(8),对应于当前时刻(t
用于定位轮子的位置的轮子定位器、轮子定位装置、系统、方法和计算机程序.pdf
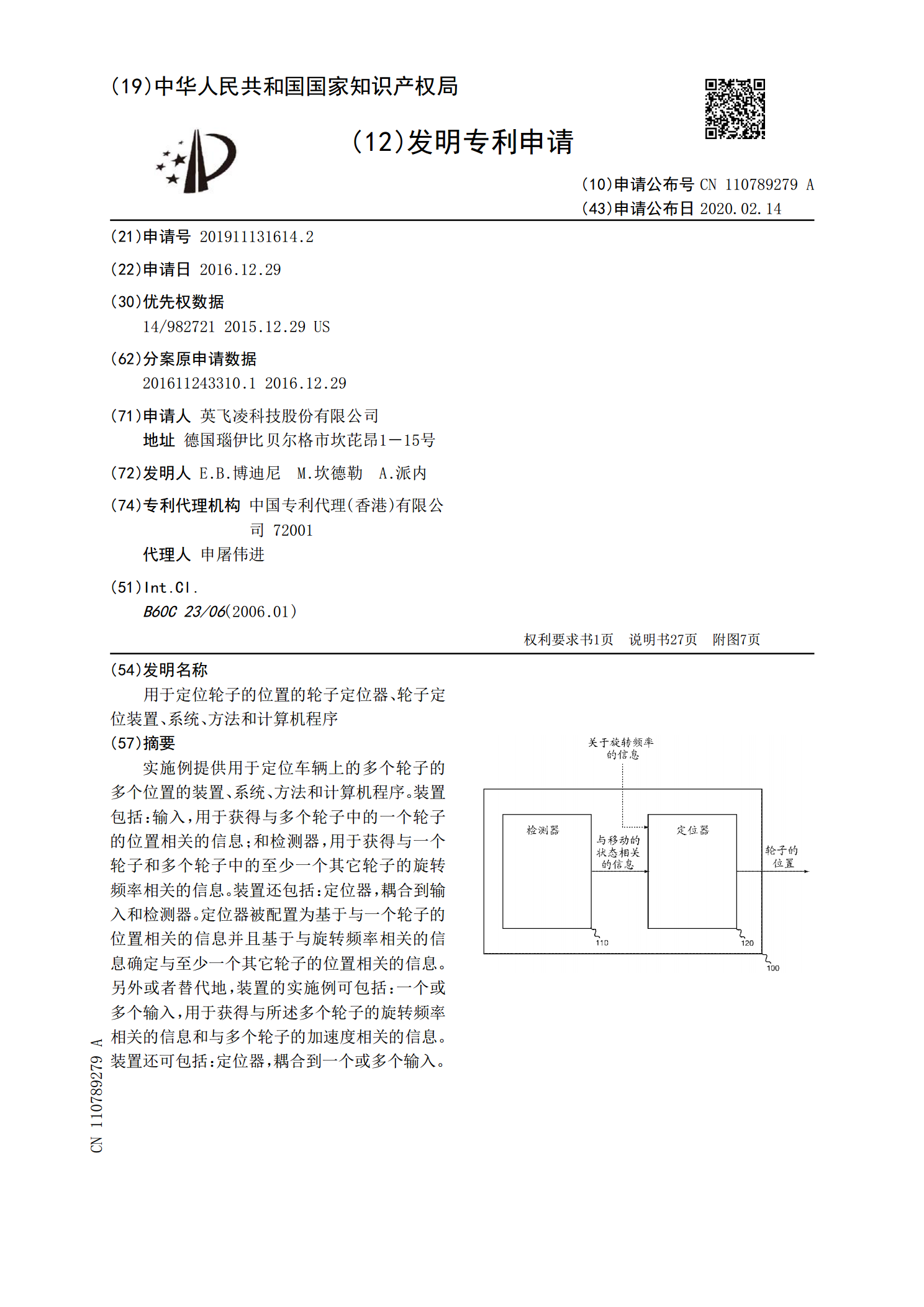
实施例提供用于定位车辆上的多个轮子的多个位置的装置、系统、方法和计算机程序。装置包括:输入,用于获得与多个轮子中的一个轮子的位置相关的信息;和检测器,用于获得与一个轮子和多个轮子中的至少一个其它轮子的旋转频率相关的信息。装置还包括:定位器,耦合到输入和检测器。定位器被配置为基于与一个轮子的位置相关的信息并且基于与旋转频率相关的信息确定与至少一个其它轮子的位置相关的信息。另外或者替代地,装置的实施例可包括:一个或多个输入,用于获得与所述多个轮子的旋转频率相关的信息和与多个轮子的加速度相关的信息。装置还可包括