
一种卫星导航与惯性导航超紧组合仿真定位的方法及终端.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种卫星导航与惯性导航超紧组合仿真定位的方法及终端.pdf
本发明公开了一种卫星导航与惯性导航超紧组合仿真定位的方法及终端,方法包括:获取仿真载体运动轨迹;根据仿真载体运动轨迹,生成仿真卫星导航信号以及仿真惯性导航数据;仿真惯性导航数据通过多普勒频率对仿真卫星导航信号处理进行辅助作用;根据仿真卫星导航、仿真惯性导航分别计算出距离以及速度;通过组合导航卡尔曼滤波器进行滤波;滤波结果对惯性导航数据进行定位校正,输出定位结果。本发明通过仿真惯性导航数据对卫星导航信号进行辅助、互补,实现深层次的双系统组合,可以最充分地利用双系统互补的信息,最大程度地提升导航性能;大大提升

一种基于多普勒信息的低轨卫星/惯性组合导航定位方法.pdf
本发明提出一种基于多普勒信息的低轨卫星/惯性组合导航定位方法,能够在轨道信息、钟差信息等先验信息不完备的条件下将低轨通信卫星与惯性导航系统进行组合导航定位的方法。通过使用该方法,组合导航系统在卫星导航信号可用时对低轨卫星的位置、钟差、钟漂等参数进行精确预测,当卫星导航信号受到干扰后不可用时,则利用低轨卫星的多普勒信息来进行定位解算,保证组合导航系统的定位误差不因惯性系统的误差积累而发散,从而保持定位精度。

低轨卫星紧组合导航UKF方法.docx
低轨卫星紧组合导航UKF方法标题:低轨卫星紧组合导航UKF方法摘要:随着全球导航系统的发展,低轨卫星紧组合导航逐渐成为一种重要的导航方式。该方法通过融合卫星导航和惯性导航的信息来提高导航精度和可靠性。本论文介绍了一种基于无人机中低轨卫星紧组合导航的UKF方法,为了提高导航精度,采用了非线性滤波器(UnscentedKalmanFilter,UKF)来进行状态估计。实验结果表明,该方法在低轨卫星紧组合导航中具有较好的性能。关键词:低轨卫星、紧组合导航、UKF、状态估计、无人机1.引言低轨卫星紧组合导航是一种
基于卫星导航与惯性导航的无盲区车辆定位系统和方法.pdf
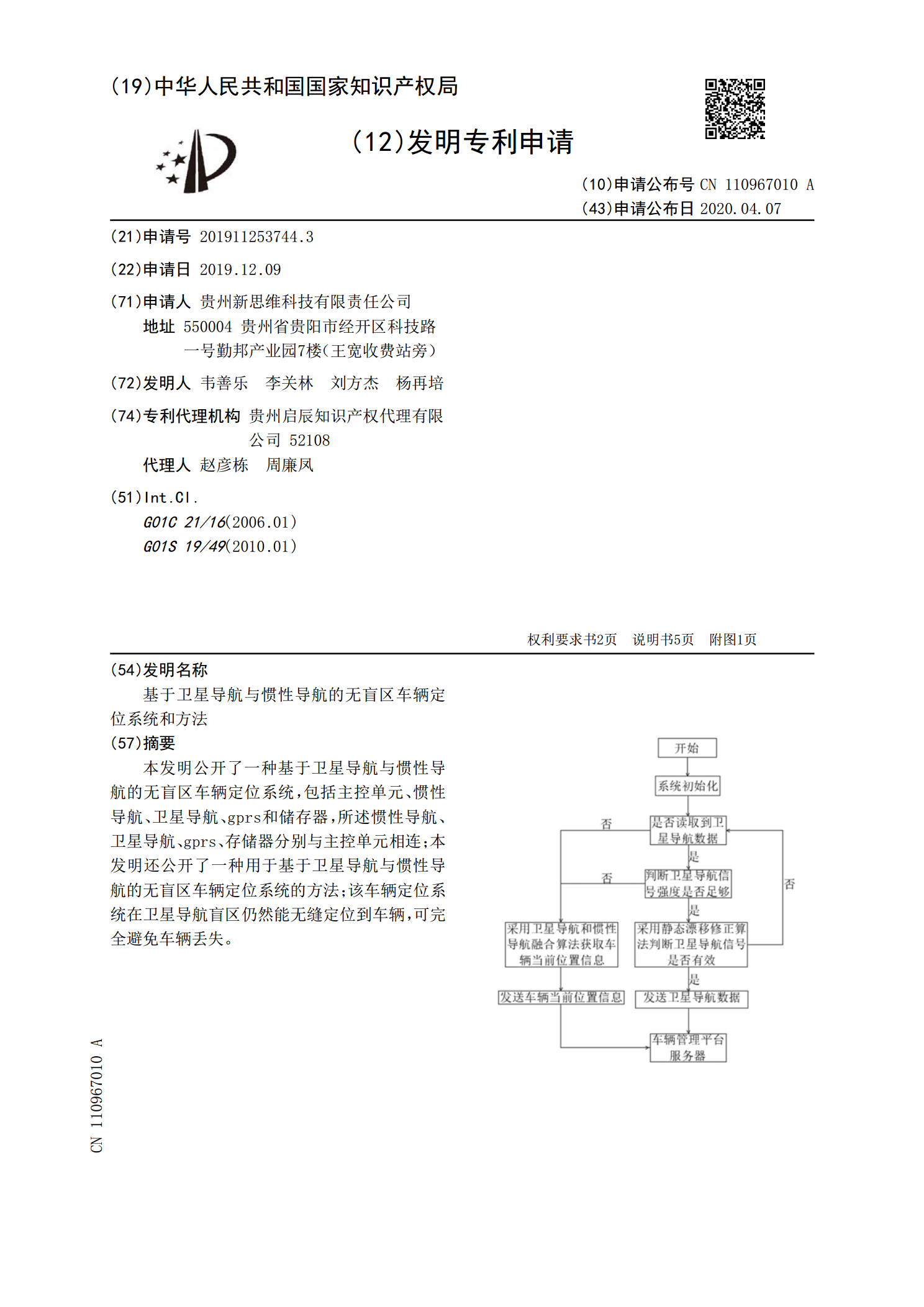
本发明公开了一种基于卫星导航与惯性导航的无盲区车辆定位系统,包括主控单元、惯性导航、卫星导航、gprs和储存器,所述惯性导航、卫星导航、gprs、存储器分别与主控单元相连;本发明还公开了一种用于基于卫星导航与惯性导航的无盲区车辆定位系统的方法;该车辆定位系统在卫星导航盲区仍然能无缝定位到车辆,可完全避免车辆丢失。

捷联惯性导航与卫星导航紧组合系统关键技术研究的开题报告.docx
捷联惯性导航与卫星导航紧组合系统关键技术研究的开题报告一、研究背景和意义随着航空、航天、探测等领域的不断发展,惯性导航和卫星导航技术作为其核心技术也在不断进步。惯性导航能够在没有外部参考的情况下,通过测量机体加速度和角速度来计算出自身的位置、速度和姿态等信息,但是其存在漂移的问题,导致误差随时间的累计不断增大,需要在一定时间内进行校正,而卫星导航定位则能够提供高精度的位置和速度信息,但在信号遮蔽、干扰等情况下精度会降低。综上所述,单一的惯性导航和卫星导航存在各自局限性,两者的紧密组合将极大地提高导航系统的