
基于卫星导航与惯性导航的无盲区车辆定位系统和方法.pdf

念珊****写意


1/9

2/9
3/9
4/9

5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于卫星导航与惯性导航的无盲区车辆定位系统和方法.pdf
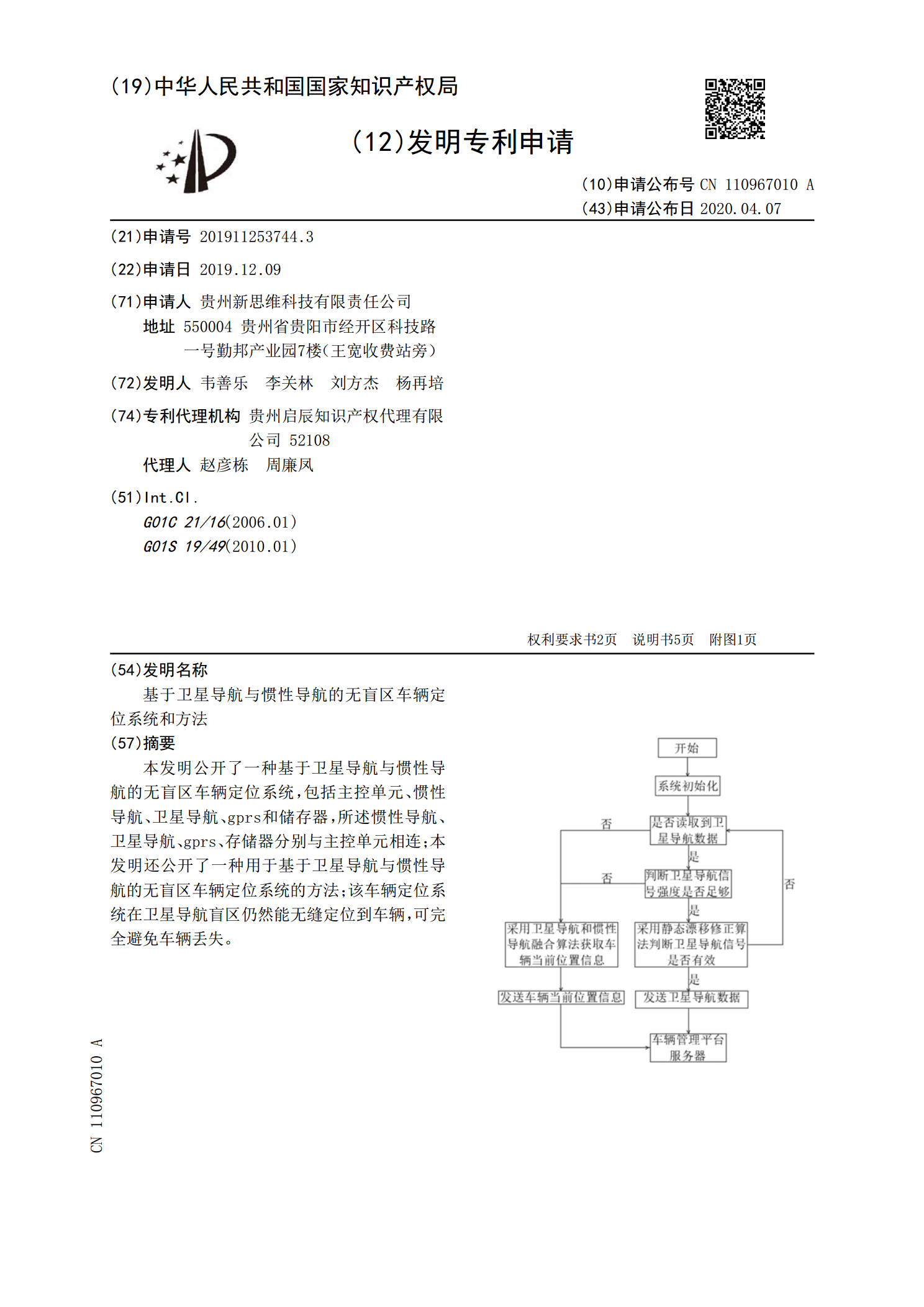
本发明公开了一种基于卫星导航与惯性导航的无盲区车辆定位系统,包括主控单元、惯性导航、卫星导航、gprs和储存器,所述惯性导航、卫星导航、gprs、存储器分别与主控单元相连;本发明还公开了一种用于基于卫星导航与惯性导航的无盲区车辆定位系统的方法;该车辆定位系统在卫星导航盲区仍然能无缝定位到车辆,可完全避免车辆丢失。

GNSS盲区中基于VANET车辆间协作的惯性导航定位方法.pdf
本发明公开了GNSS盲区中基于VANET车辆间协作的惯性导航定位方法,该方法在GNSS盲区使用惯性导航定位技术进行单独定位的基础上,引入协作定位的理念,解决GNSS盲区中单独使用惯性导航INS进行定位时定位误差随时间积累造成的定位性能较差问题,包括:首先,车辆之间通过DSRC进行通信,共享车辆自身的INS位置信息、里程仪的速度信息,ID等;其次,各车辆根据接收到的邻近车辆的速度信息等检测车辆与邻近车辆“相遇”时刻;再次,根据相遇时刻得到车辆相遇时的距离;然后,利用航位推算将本地的INS位置信息和车辆之间的

车辆定位导航系统和车辆以及车辆定位导航方法.pdf
本发明公开一种车辆定位导航系统和车辆以及车辆定位导航方法,车辆定位导航系统包括:卫星定位天线,用于接收车辆定位信息;卫星定位行驶记录仪,与卫星定位天线连接,用于响应于定位信息请求信号发送车辆定位信息;车载多媒体系统,车载多媒体系统与卫星定位行驶记录仪连接,车载多媒体系统包括导航模块,车载多媒体系统用于发送定位信息请求信号,并获取车辆定位信息,导航模块根据车辆定位信息生成导航信息并显示。本发明实施例的车辆定位导航系统,无需设置与车载多媒体系统直接连接的卫星定位天线,从而节省一根卫星定位天线,降低了成本。
基于卫星导航系统的水下导航定位基准装置及方法.pdf
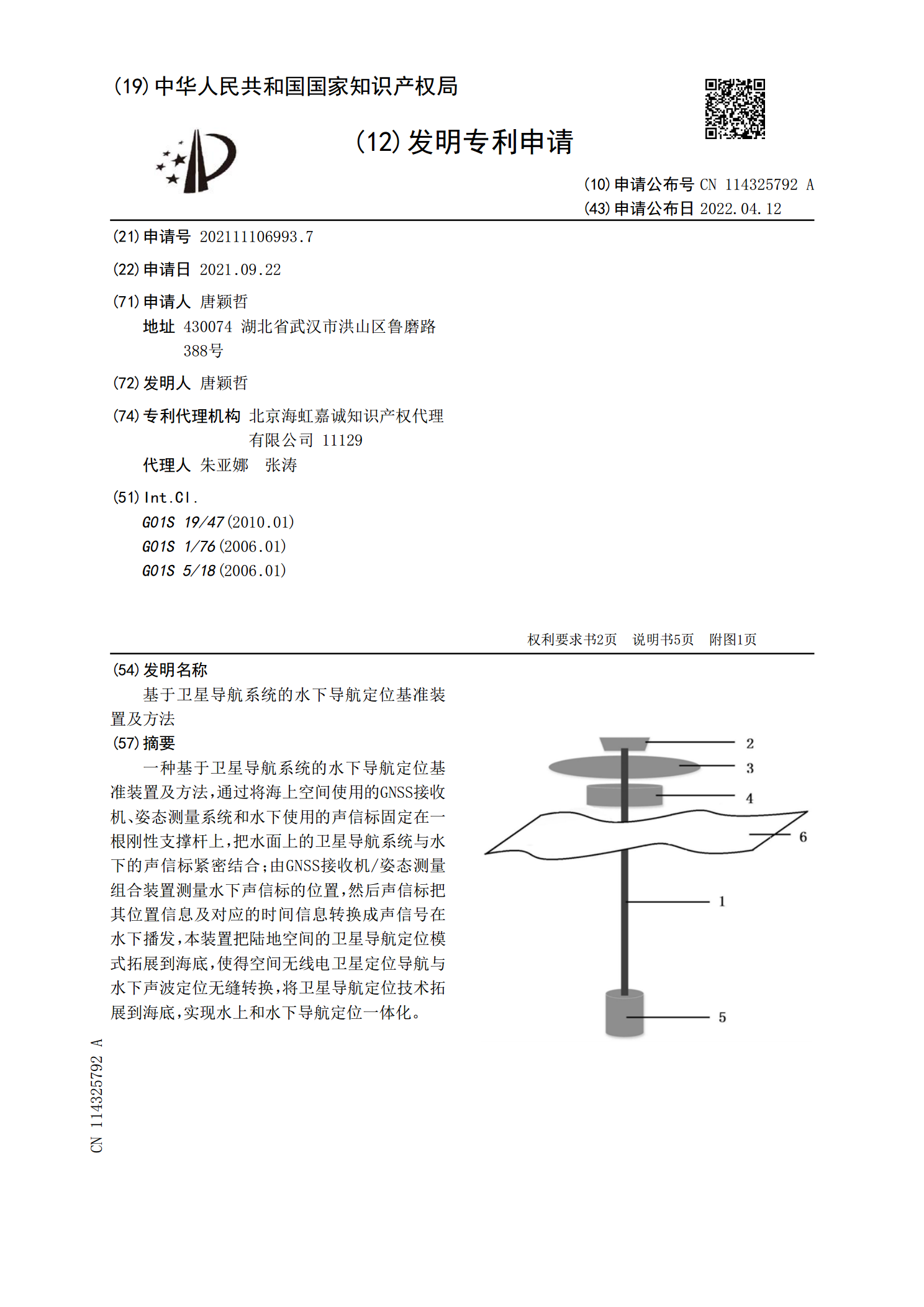
一种基于卫星导航系统的水下导航定位基准装置及方法,通过将海上空间使用的GNSS接收机、姿态测量系统和水下使用的声信标固定在一根刚性支撑杆上,把水面上的卫星导航系统与水下的声信标紧密结合;由GNSS接收机/姿态测量组合装置测量水下声信标的位置,然后声信标把其位置信息及对应的时间信息转换成声信号在水下播发,本装置把陆地空间的卫星导航定位模式拓展到海底,使得空间无线电卫星定位导航与水下声波定位无缝转换,将卫星导航定位技术拓展到海底,实现水上和水下导航定位一体化。

基于RFID和惯性导航的室内定位系统.docx
基于RFID和惯性导航的室内定位系统摘要:针对目前室内定位导航的定位限制因素多,准确度低等问题,研究了一种基于RFID和惯性导航的室内定位系统。该系统利用多从机定点的方式,通过射频定位和步行者航位推算进行RFID与惯性导航相结合,实时修正位置信息,降低积累误差。实验结果显示:与传统室内定位导航系统相比,此系统提高了室内导航的精度与覆盖力。关键词:射频识别;室内导航;惯性导航;室内定位;0引言近年来,定位服务正向室内发展,以满足日益增长的室内定位需求。室内定位技术分为2类:第一类为基于外置信号源的室内定位技