
一种基于多普勒信息的低轨卫星/惯性组合导航定位方法.pdf

一只****呀盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多普勒信息的低轨卫星/惯性组合导航定位方法.pdf
本发明提出一种基于多普勒信息的低轨卫星/惯性组合导航定位方法,能够在轨道信息、钟差信息等先验信息不完备的条件下将低轨通信卫星与惯性导航系统进行组合导航定位的方法。通过使用该方法,组合导航系统在卫星导航信号可用时对低轨卫星的位置、钟差、钟漂等参数进行精确预测,当卫星导航信号受到干扰后不可用时,则利用低轨卫星的多普勒信息来进行定位解算,保证组合导航系统的定位误差不因惯性系统的误差积累而发散,从而保持定位精度。
低轨卫星备份导航系统多普勒定位解算方法.pdf
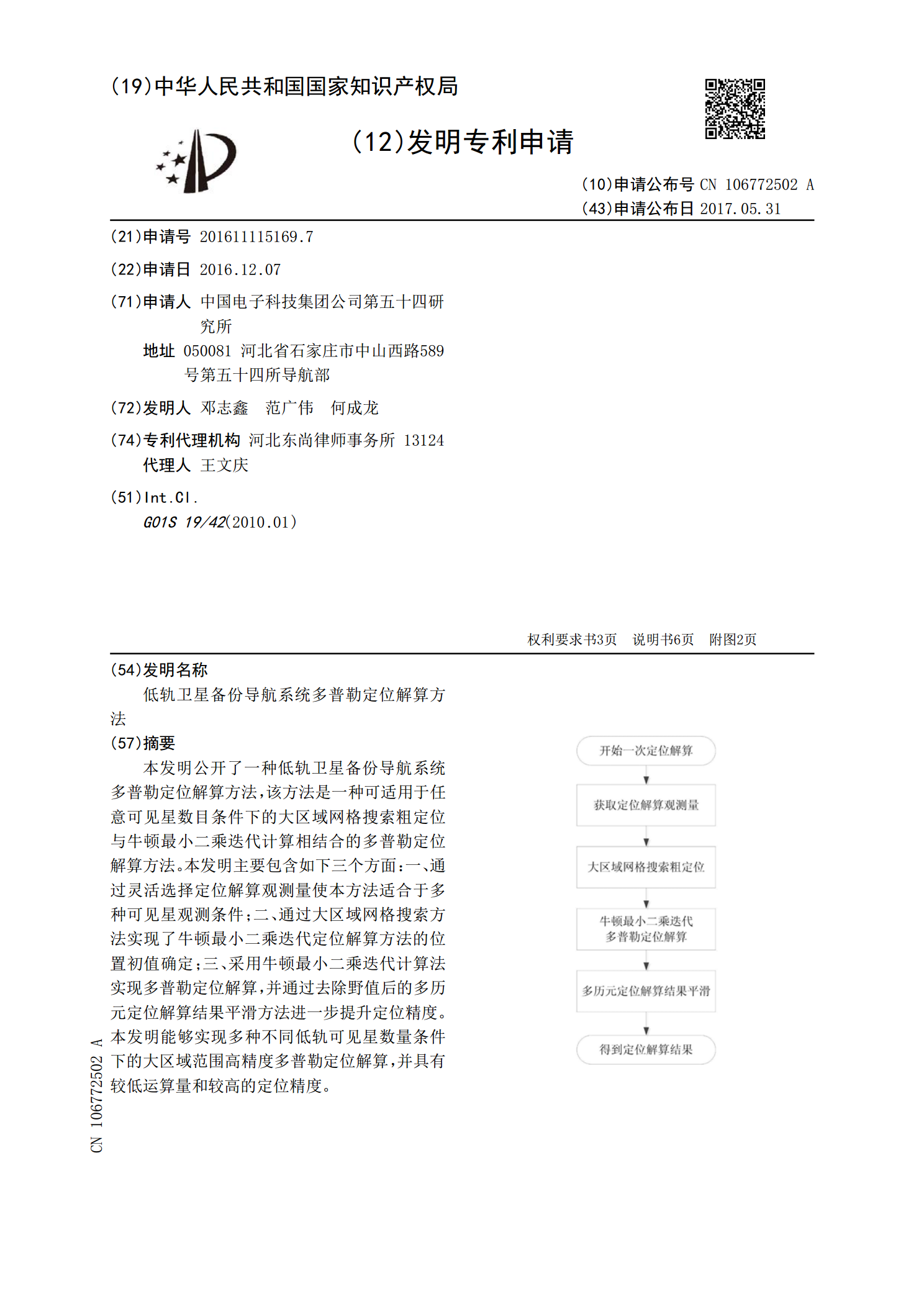
本发明公开了一种低轨卫星备份导航系统多普勒定位解算方法,该方法是一种可适用于任意可见星数目条件下的大区域网格搜索粗定位与牛顿最小二乘迭代计算相结合的多普勒定位解算方法。本发明主要包含如下三个方面:一、通过灵活选择定位解算观测量使本方法适合于多种可见星观测条件;二、通过大区域网格搜索方法实现了牛顿最小二乘迭代定位解算方法的位置初值确定;三、采用牛顿最小二乘迭代计算法实现多普勒定位解算,并通过去除野值后的多历元定位解算结果平滑方法进一步提升定位精度。本发明能够实现多种不同低轨可见星数量条件下的大区域范围高精度

低轨卫星导航系统多场景多普勒定位解算方法.docx
低轨卫星导航系统多场景多普勒定位解算方法一、引言随着人类社会的不断发展,导航系统也越来越受到人们的关注。导航系统已经成为现代科技的重要组成部分,在诸多领域得到广泛应用。低轨卫星导航系统是其中的一个重要分支,在不同领域如交通运输、航空航天、地理测量等领域都有广泛的应用。在未来,低轨卫星导航系统将成为人们日常生活不可或缺的一部分。二、低轨卫星导航系统低轨卫星导航系统是一个全球性的定位导航系统,主要由美国、俄罗斯、欧洲、中国等国家开发建设。其中,美国的GPS系统、俄罗斯的GLONASS系统、欧洲的Galileo
基于低轨卫星星座几何量测信息的光学导航定位方法.pdf
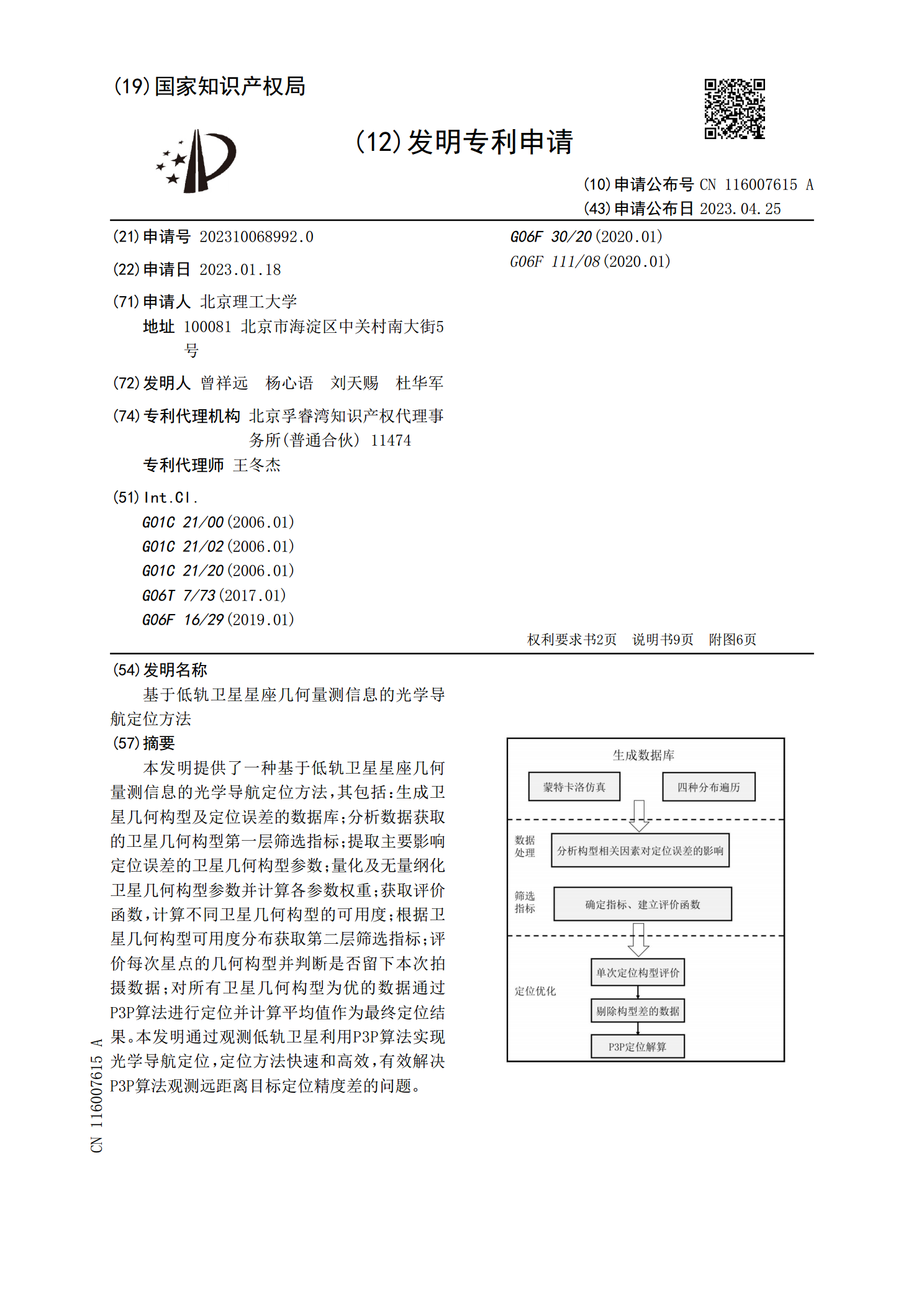
本发明提供了一种基于低轨卫星星座几何量测信息的光学导航定位方法,其包括:生成卫星几何构型及定位误差的数据库;分析数据获取的卫星几何构型第一层筛选指标;提取主要影响定位误差的卫星几何构型参数;量化及无量纲化卫星几何构型参数并计算各参数权重;获取评价函数,计算不同卫星几何构型的可用度;根据卫星几何构型可用度分布获取第二层筛选指标;评价每次星点的几何构型并判断是否留下本次拍摄数据;对所有卫星几何构型为优的数据通过P3P算法进行定位并计算平均值作为最终定位结果。本发明通过观测低轨卫星利用P3P算法实现光学导航定位

低轨卫星紧组合导航UKF方法.docx
低轨卫星紧组合导航UKF方法标题:低轨卫星紧组合导航UKF方法摘要:随着全球导航系统的发展,低轨卫星紧组合导航逐渐成为一种重要的导航方式。该方法通过融合卫星导航和惯性导航的信息来提高导航精度和可靠性。本论文介绍了一种基于无人机中低轨卫星紧组合导航的UKF方法,为了提高导航精度,采用了非线性滤波器(UnscentedKalmanFilter,UKF)来进行状态估计。实验结果表明,该方法在低轨卫星紧组合导航中具有较好的性能。关键词:低轨卫星、紧组合导航、UKF、状态估计、无人机1.引言低轨卫星紧组合导航是一种