
目标姿态的确定方法及终端设备.pdf

Jo****63


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标姿态的确定方法及终端设备.pdf
本发明适用于雷达技术领域,提供了一种目标姿态确定方法及终端设备,包括:获取目标的雷达回波信号,并根据雷达回波信号确定雷达回波信号的距离‑多普勒热力图;根据雷达回波信号的距离‑多普勒热力图,确定目标的目标点云数据;根据目标点云数据确定目标的个数及各个目标的姿态。本发明根据雷达回波信号的距离‑多普勒热力图确定目标的目标点云数据,从而根据目标点云数据确定目标的姿态角度,准确率高,有效提升了雷达的应用效果。

确定自主铲运机姿态的方法.docx
确定自主铲运机姿态的方法自主铲运机在工业生产中广泛应用,然而它完成任务的效率与准确性大多受限于其姿态的控制。因此,确定自主铲运机姿态的方法成为了一项重要的研究课题。本论文将介绍目前常用的三种姿态控制方法:惯性测量单元(IMU)姿态估计、视觉姿态估计和混合姿态估计方法,并比较它们的优缺点和适应场景,以期为该领域的研究提供参考。1.惯性测量单元姿态估计IMU是一类基于加速度计和陀螺仪等惯性传感器的姿态测量装置。加速度计可以测量自主铲运机受到的加速度,而陀螺仪则可以测量自主铲运机的角速度。因此,IMU通过测量这
一种竖井掘进机姿态确定系统及姿态确定方法.pdf
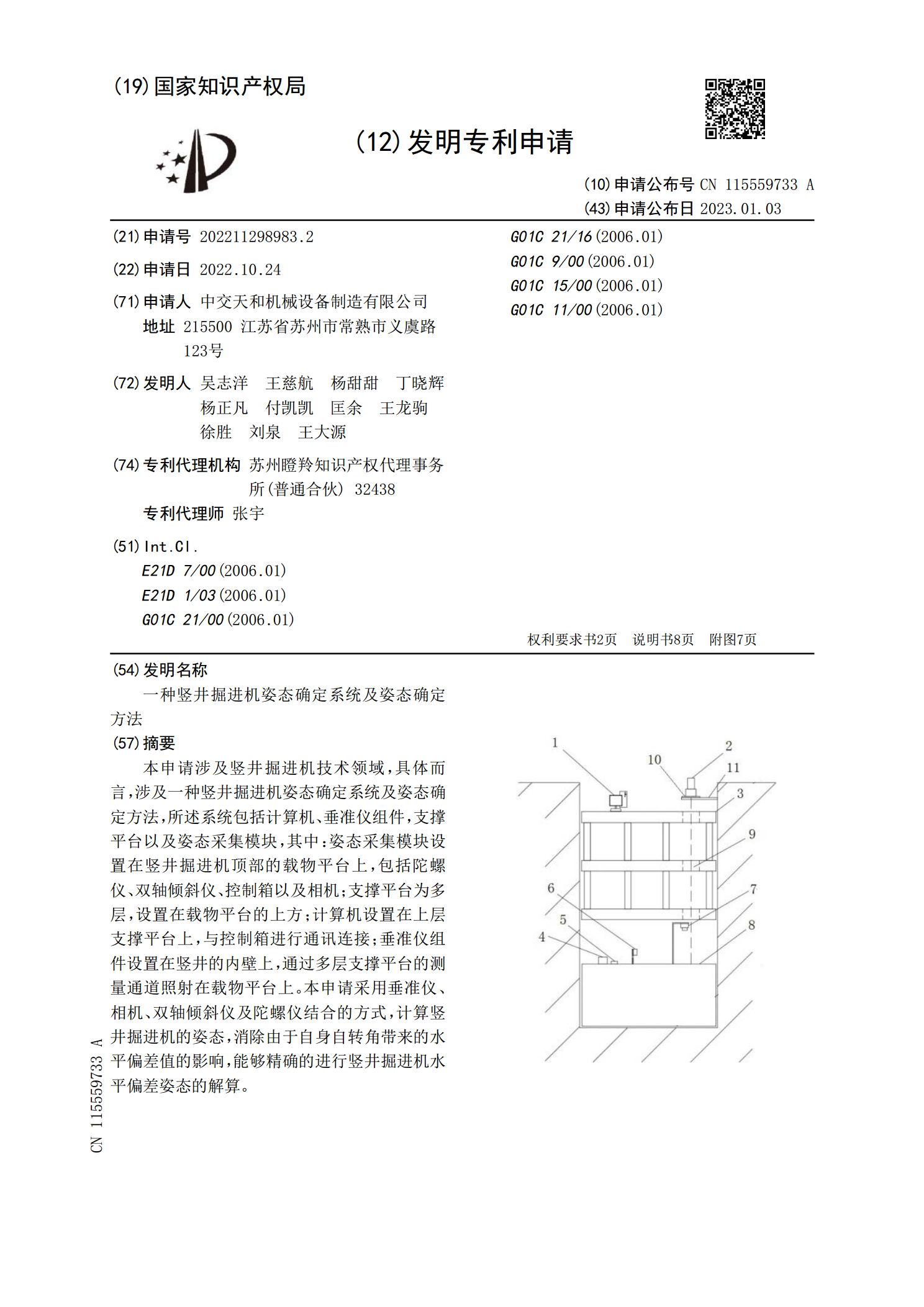
本申请涉及竖井掘进机技术领域,具体而言,涉及一种竖井掘进机姿态确定系统及姿态确定方法,所述系统包括计算机、垂准仪组件,支撑平台以及姿态采集模块,其中:姿态采集模块设置在竖井掘进机顶部的载物平台上,包括陀螺仪、双轴倾斜仪、控制箱以及相机;支撑平台为多层,设置在载物平台的上方;计算机设置在上层支撑平台上,与控制箱进行通讯连接;垂准仪组件设置在竖井的内壁上,通过多层支撑平台的测量通道照射在载物平台上。本申请采用垂准仪、相机、双轴倾斜仪及陀螺仪结合的方式,计算竖井掘进机的姿态,消除由于自身自转角带来的水平偏差值的

目标对象的位置确定方法、终端设备及航行系统.pdf
本申请实施例适用于目标感知技术领域,提供了一种目标对象的位置确定方法、终端设备及航行系统,所述方法包括:接收测量设备采集的测量数据,所述测量数据包括所述测量设备的测量高度以及所述测量设备的俯仰角度,所述测量设备为航行设备搭载的系留无人机;根据所述测量高度和所述俯仰角度,确定目标对象的位置。采用上述方法,可以准确确定目标对象的位置。

人体姿态还原方法、装置、终端设备及存储介质.pdf
本申请适用于运动捕捉技术领域,提供了一种人体姿态还原方法、装置、终端设备及存储介质,所述人体姿态还原方法包括:获取与目标运动场景相关的目标运动数据,所述目标运动场景是指人体的运动所属的场景;根据所述目标运动数据,确定运动捕捉设备在所述人体上的目标安装位置;根据所述目标运动数据与所述人体上的目标安装位置,训练神经网络;在所述运动捕捉设备已安装在所述目标安装位置的情况下,获取所述运动捕捉设备捕捉的运动数据;将所述运动捕捉设备捕捉的运动数据输入到已训练的神经网络中,还原出所述人体的运动姿态。采用上述方法可以解决