
目标对象的位置确定方法、终端设备及航行系统.pdf

英哲****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标对象的位置确定方法、终端设备及航行系统.pdf
本申请实施例适用于目标感知技术领域,提供了一种目标对象的位置确定方法、终端设备及航行系统,所述方法包括:接收测量设备采集的测量数据,所述测量数据包括所述测量设备的测量高度以及所述测量设备的俯仰角度,所述测量设备为航行设备搭载的系留无人机;根据所述测量高度和所述俯仰角度,确定目标对象的位置。采用上述方法,可以准确确定目标对象的位置。

确定目标对象位置的方法、装置及系统.pdf
本发明公开了一种确定目标对象位置的方法、装置及系统。其中,该方法包括:监控终端采集进入监控范围内的目标对象的标识信息;监控终端检测目标对象的状态信息,其中,状态信息至少包括信号强度和信号驻留时长;当状态信息满足预设条件时,确定具有标识信息的目标对象位于特定区域内。本发明解决了现有技术中无法确定目标对象是否进入指定区域的技术问题。
目标对象的轨迹确定方法、装置及系统.pdf
本发明提供了一种目标对象的轨迹确定方法、装置及系统,涉及智能识别技术领域,该方法应用于处理设备,处理设备与设置于固定物的距离探测器相连,距离探测器的感测方向平行于地面;方法包括:监测距离探测器探测目标对象得到的距离信息;根据距离探测器探测到的距离信息,绘制目标对象的轨迹。本发明无需完全借助视觉识别,即可通过距离传感器较好地确定消费者在购物过程中的轨迹,能够有效降低成本,适合推广应用。
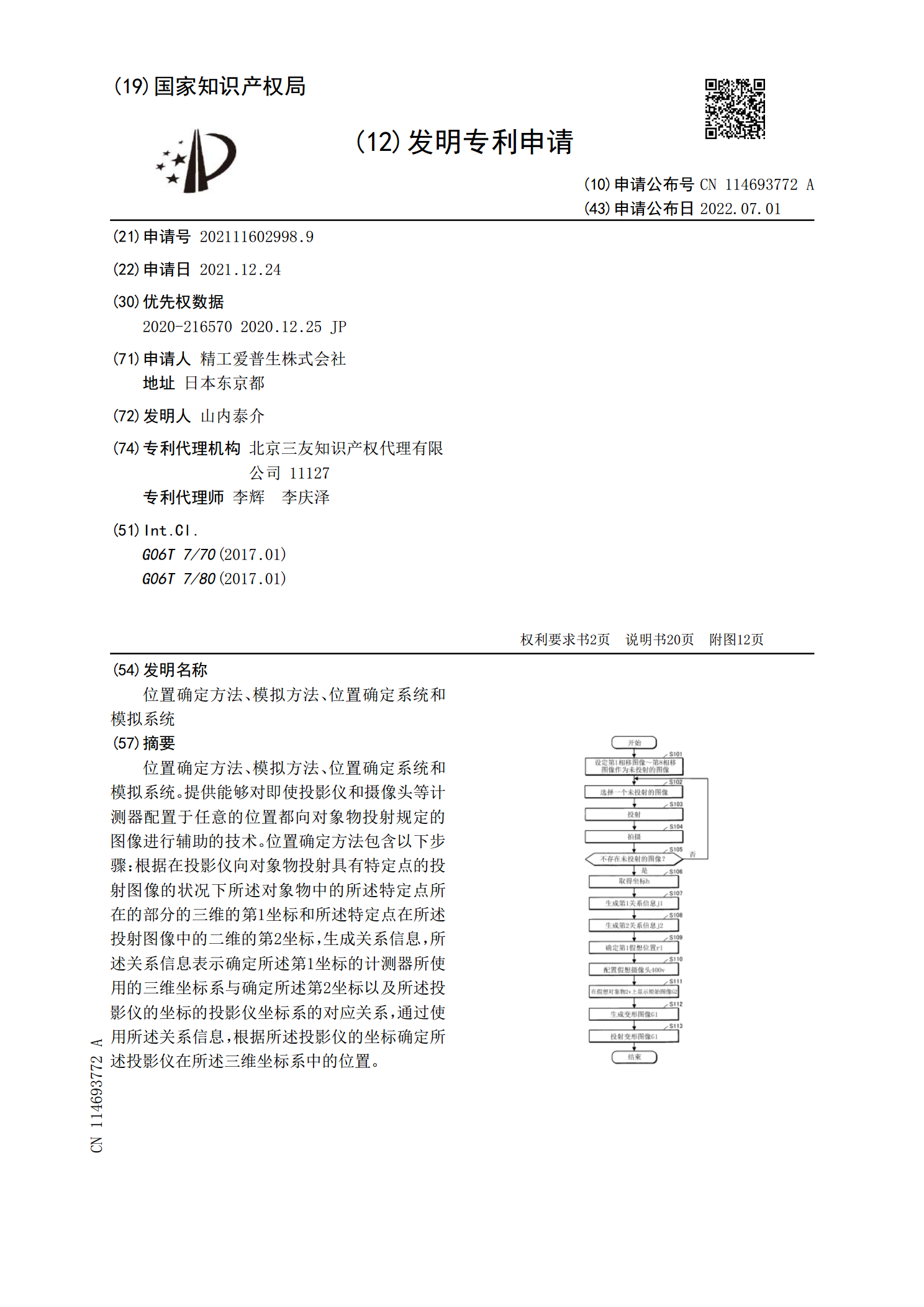
位置确定方法、模拟方法、位置确定系统和模拟系统.pdf
位置确定方法、模拟方法、位置确定系统和模拟系统。提供能够对即使投影仪和摄像头等计测器配置于任意的位置都向对象物投射规定的图像进行辅助的技术。位置确定方法包含以下步骤:根据在投影仪向对象物投射具有特定点的投射图像的状况下所述对象物中的所述特定点所在的部分的三维的第1坐标和所述特定点在所述投射图像中的二维的第2坐标,生成关系信息,所述关系信息表示确定所述第1坐标的计测器所使用的三维坐标系与确定所述第2坐标以及所述投影仪的坐标的投影仪坐标系的对应关系,通过使用所述关系信息,根据所述投影仪的坐标确定所述投影仪在所
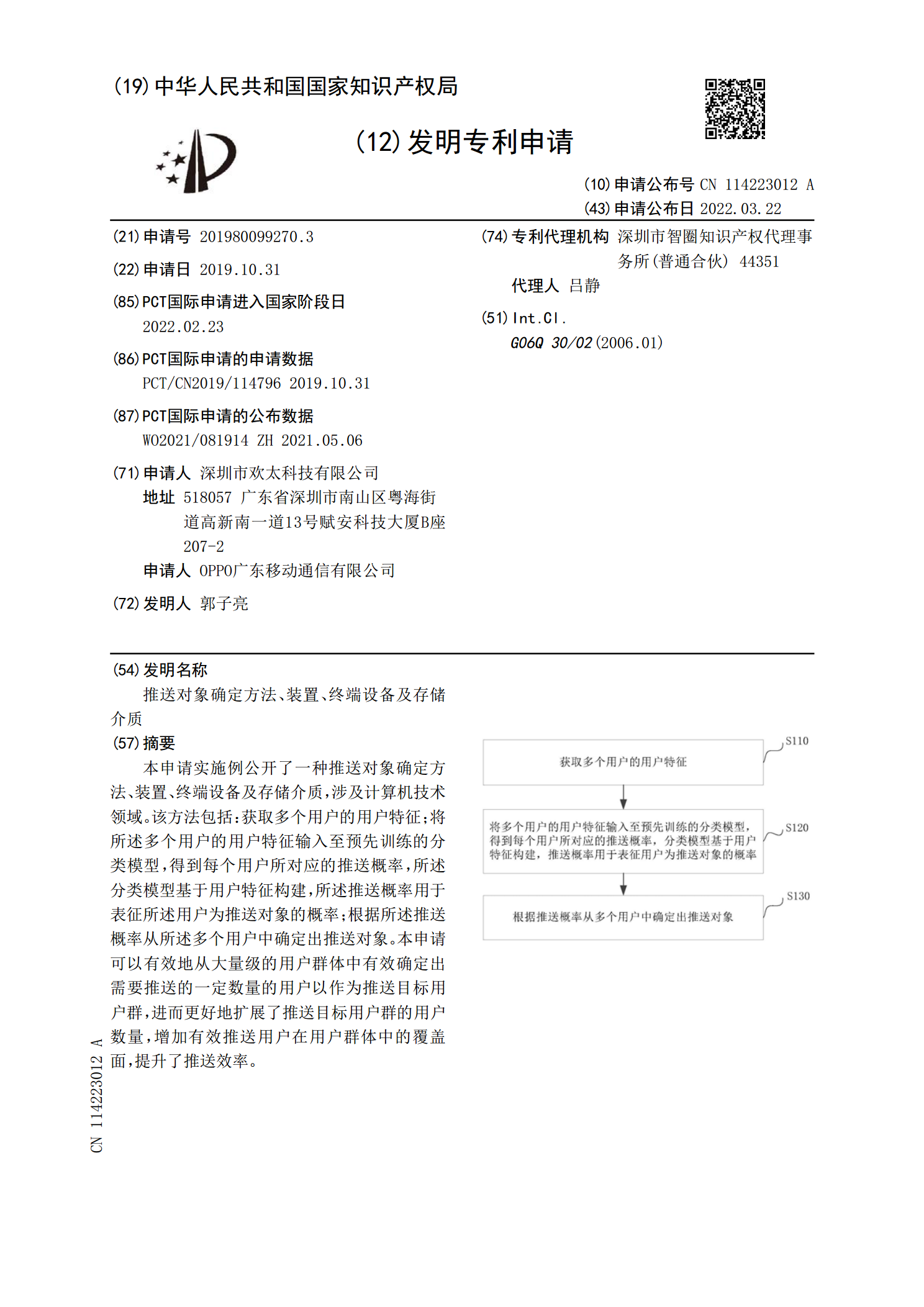
推送对象确定方法、装置、终端设备及存储介质.pdf
本申请实施例公开了一种推送对象确定方法、装置、终端设备及存储介质,涉及计算机技术领域。该方法包括:获取多个用户的用户特征;将所述多个用户的用户特征输入至预先训练的分类模型,得到每个用户所对应的推送概率,所述分类模型基于用户特征构建,所述推送概率用于表征所述用户为推送对象的概率;根据所述推送概率从所述多个用户中确定出推送对象。本申请可以有效地从大量级的用户群体中有效确定出需要推送的一定数量的用户以作为推送目标用户群,进而更好地扩展了推送目标用户群的用户数量,增加有效推送用户在用户群体中的覆盖面,提升了推送效