
确定自主铲运机姿态的方法.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

确定自主铲运机姿态的方法.docx
确定自主铲运机姿态的方法自主铲运机在工业生产中广泛应用,然而它完成任务的效率与准确性大多受限于其姿态的控制。因此,确定自主铲运机姿态的方法成为了一项重要的研究课题。本论文将介绍目前常用的三种姿态控制方法:惯性测量单元(IMU)姿态估计、视觉姿态估计和混合姿态估计方法,并比较它们的优缺点和适应场景,以期为该领域的研究提供参考。1.惯性测量单元姿态估计IMU是一类基于加速度计和陀螺仪等惯性传感器的姿态测量装置。加速度计可以测量自主铲运机受到的加速度,而陀螺仪则可以测量自主铲运机的角速度。因此,IMU通过测量这
一种竖井掘进机姿态确定系统及姿态确定方法.pdf
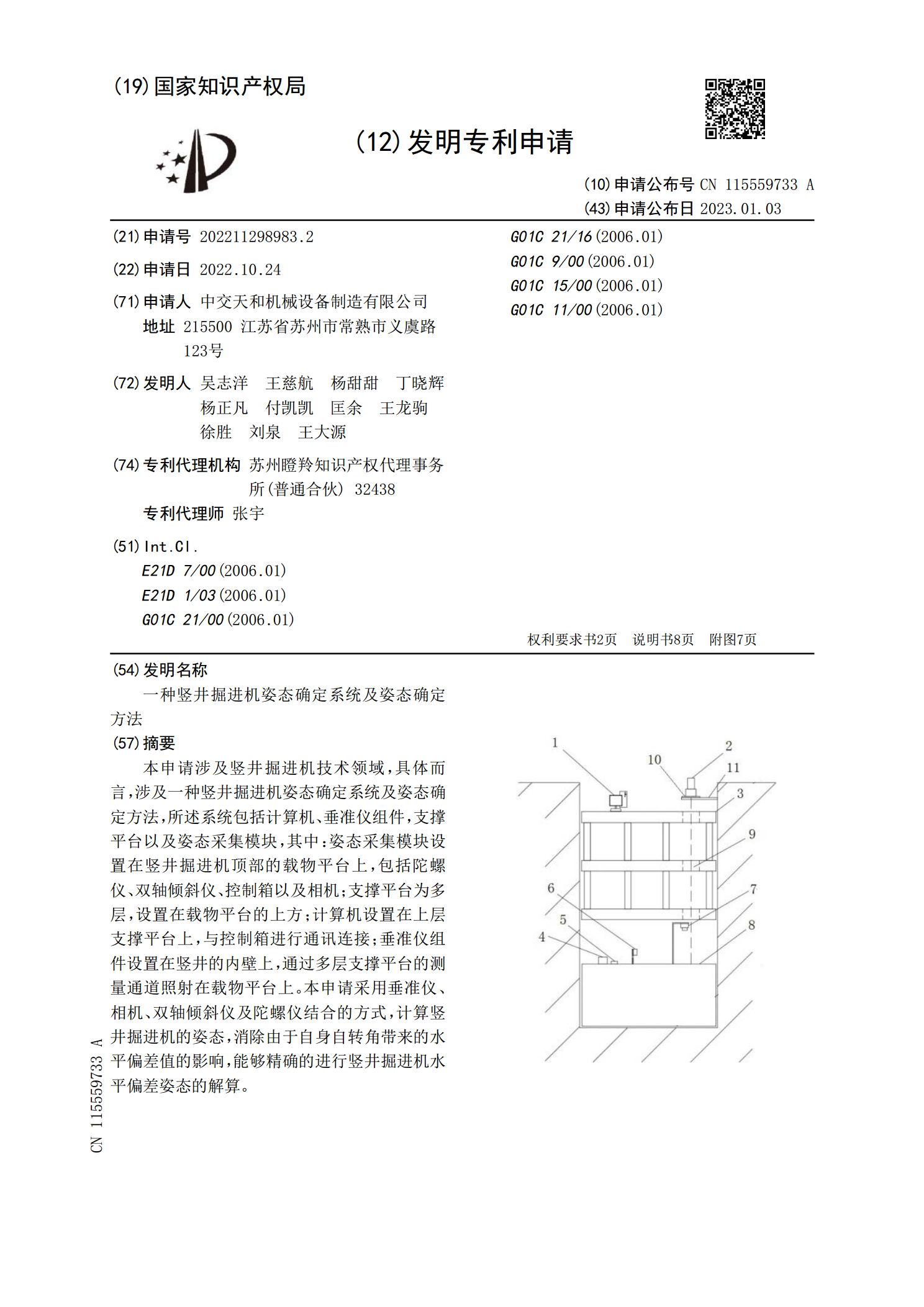
本申请涉及竖井掘进机技术领域,具体而言,涉及一种竖井掘进机姿态确定系统及姿态确定方法,所述系统包括计算机、垂准仪组件,支撑平台以及姿态采集模块,其中:姿态采集模块设置在竖井掘进机顶部的载物平台上,包括陀螺仪、双轴倾斜仪、控制箱以及相机;支撑平台为多层,设置在载物平台的上方;计算机设置在上层支撑平台上,与控制箱进行通讯连接;垂准仪组件设置在竖井的内壁上,通过多层支撑平台的测量通道照射在载物平台上。本申请采用垂准仪、相机、双轴倾斜仪及陀螺仪结合的方式,计算竖井掘进机的姿态,消除由于自身自转角带来的水平偏差值的

地下铲运机自主行驶与避障控制方法研究.docx
地下铲运机自主行驶与避障控制方法研究地下铲运机自主行驶与避障控制方法研究随着工业和矿业的发展,地下开采的需求越来越大。地下铲运机作为地下开采的必要工具,其自主行驶和避障控制方法的研究具有重要意义。本文将首先介绍地下铲运机的自主行驶技术,然后分析避障控制的关键技术和方法,并对其进行研究。一、地下铲运机的自主行驶技术地下铲运机自主行驶技术是指使用传感器等设备,将地下铲运机变为具有自主行驶功能的无人车辆,实现对其自身的协同、定位与导航等智能控制。在这些技术中,定位和导航是最基本的控制任务之一,同时,精确定位支持

一种基于姿态信息的航天器地标匹配自主位置确定方法.pdf
本发明公开了一种基于姿态信息的航天器地标匹配自主位置确定方法,包括航天器对地拍摄,获取遥感图像并与遥感地标模板库中的地标进行匹配;使用星载姿态敏感器所提供的航天器姿态信息对所匹配的地标进行坐标变换;选择三个地标,使用P3P算法解算出地标到航天器位置信息;根据投影点像素坐标和距离量求出向量各个轴分量;使用向量合成原理并进行姿态反变换得到航天器位置信息;使用重投影算法构建损失函数,保留真实航天器位置信息。本发明方法,通过构建过渡坐标系与向量关系实现了对于航天器位置的解算,并结合重投影方法筛选较高精度的解。综合

目标姿态的确定方法及终端设备.pdf
本发明适用于雷达技术领域,提供了一种目标姿态确定方法及终端设备,包括:获取目标的雷达回波信号,并根据雷达回波信号确定雷达回波信号的距离‑多普勒热力图;根据雷达回波信号的距离‑多普勒热力图,确定目标的目标点云数据;根据目标点云数据确定目标的个数及各个目标的姿态。本发明根据雷达回波信号的距离‑多普勒热力图确定目标的目标点云数据,从而根据目标点云数据确定目标的姿态角度,准确率高,有效提升了雷达的应用效果。