
用于动态固定的方法.pdf

子安****吖吖


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于动态固定的方法.pdf
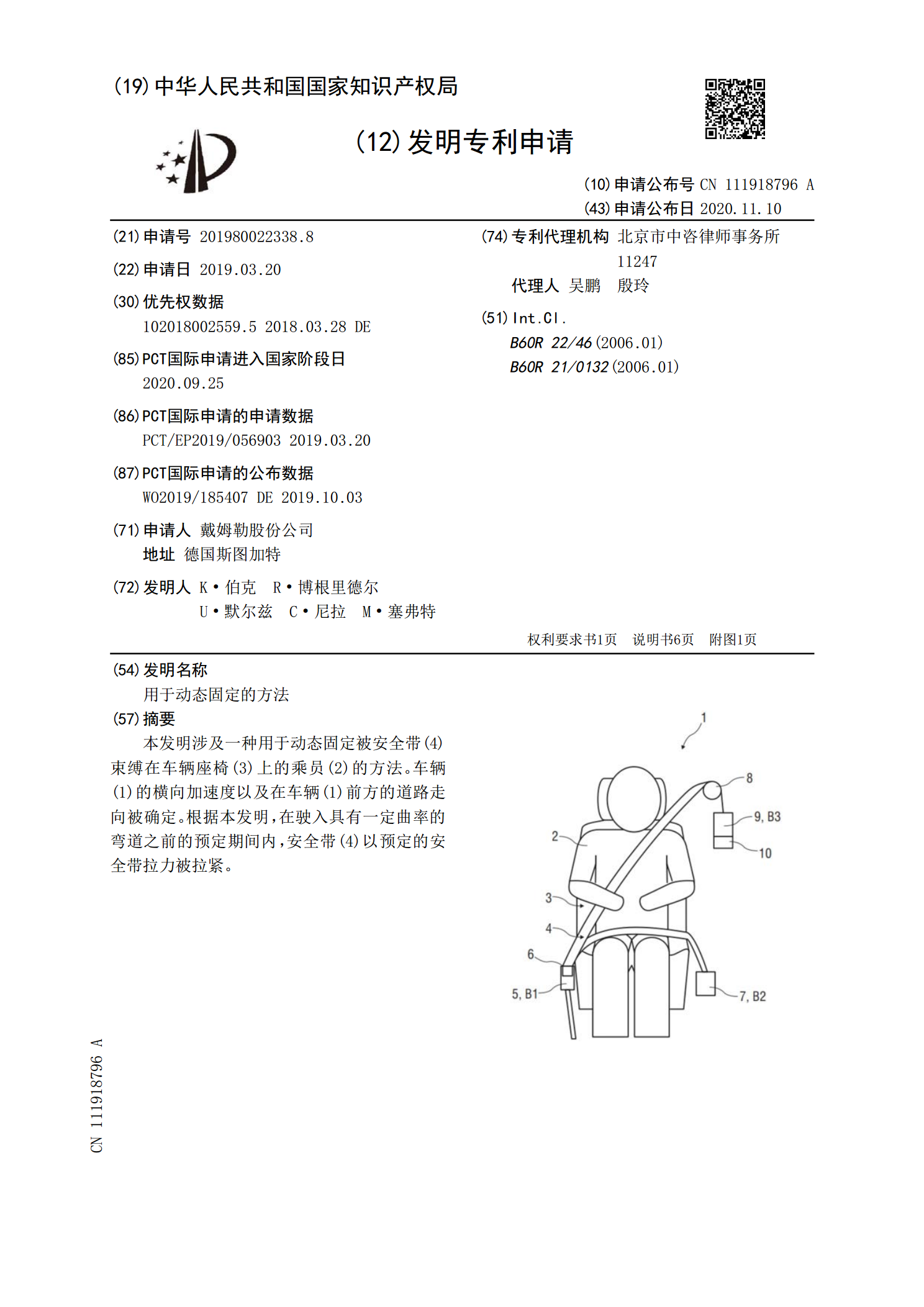
本发明涉及一种用于动态固定被安全带(4)束缚在车辆座椅(3)上的乘员(2)的方法。车辆(1)的横向加速度以及在车辆(1)前方的道路走向被确定。根据本发明,在驶入具有一定曲率的弯道之前的预定期间内,安全带(4)以预定的安全带拉力被拉紧。

动态固定方法.pdf
本发明涉及一种用于动态固定被安全带紧缚在车辆座椅上的乘员的方法,其中,确定车辆的横向加速度(a

用于动态声音均衡的方法.pdf
本公开的各方面涉及用于调整房间声级的技术,所述技术包括:以已知的波形驱动扬声器;用至少两个麦克风检测来自所述扬声器的声波,其中所述至少两个麦克风以已知的定向进行配置;利用所述已知的波形以及由所述至少两个麦克风检测到的所述声波和所述至少两个麦克风的所述已知的定向来生成房间声音动态;应用滤波器来调整声级以考虑所述房间声音动态。所述房间声音动态可为房间的扬声器布局、房间脉冲响应、每个扬声器距所述房间的中心的距离或角度,或可影响用户对来自声音系统的声音的感知的其他物理约束。
用于固定车辆的方法.pdf
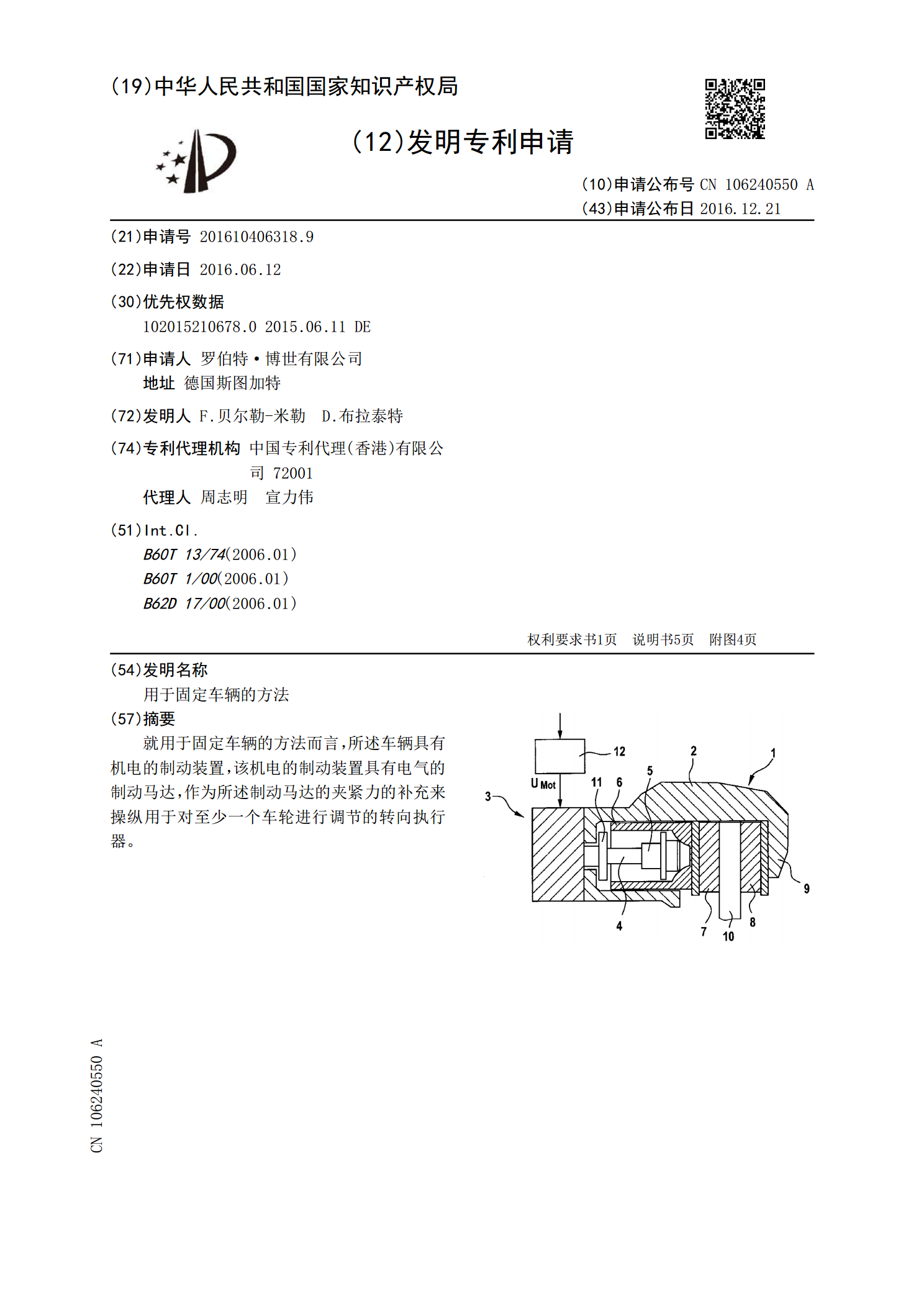
就用于固定车辆的方法而言,所述车辆具有机电的制动装置,该机电的制动装置具有电气的制动马达,作为所述制动马达的夹紧力的补充来操纵用于对至少一个车轮进行调节的转向执行器。
用于动态CSI反馈的方法.pdf
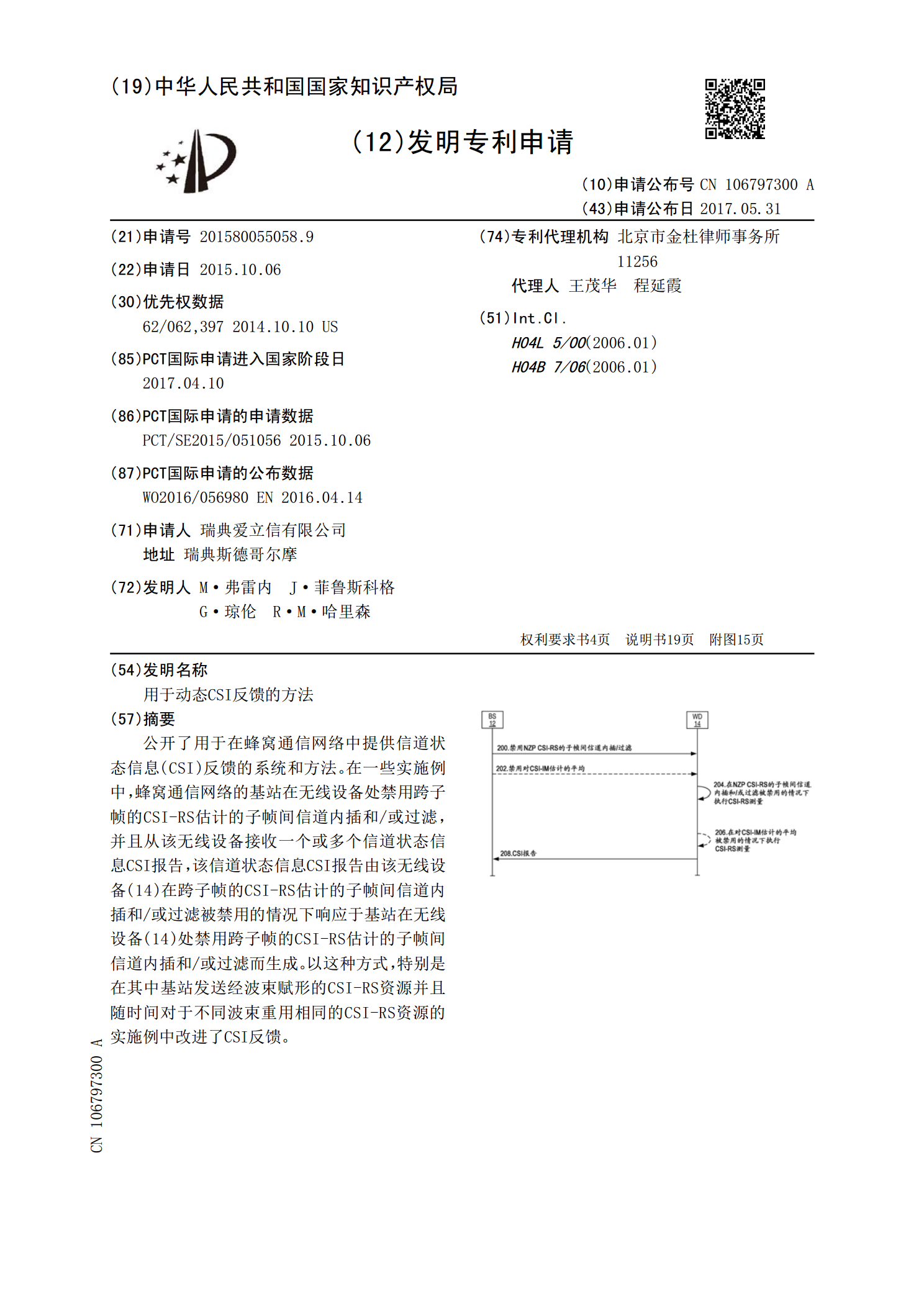
公开了用于在蜂窝通信网络中提供信道状态信息(CSI)反馈的系统和方法。在一些实施例中,蜂窝通信网络的基站在无线设备处禁用跨子帧的CSI‑RS估计的子帧间信道内插和/或过滤,并且从该无线设备接收一个或多个信道状态信息CSI报告,该信道状态信息CSI报告由该无线设备(14)在跨子帧的CSI‑RS估计的子帧间信道内插和/或过滤被禁用的情况下响应于基站在无线设备(14)处禁用跨子帧的CSI‑RS估计的子帧间信道内插和/或过滤而生成。以这种方式,特别是在其中基站发送经波束赋形的CSI‑RS资源并且随时间对于不同波束