
动态固定方法.pdf

努力****振宇


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

动态固定方法.pdf
本发明涉及一种用于动态固定被安全带紧缚在车辆座椅上的乘员的方法,其中,确定车辆的横向加速度(a
用于动态固定的方法.pdf
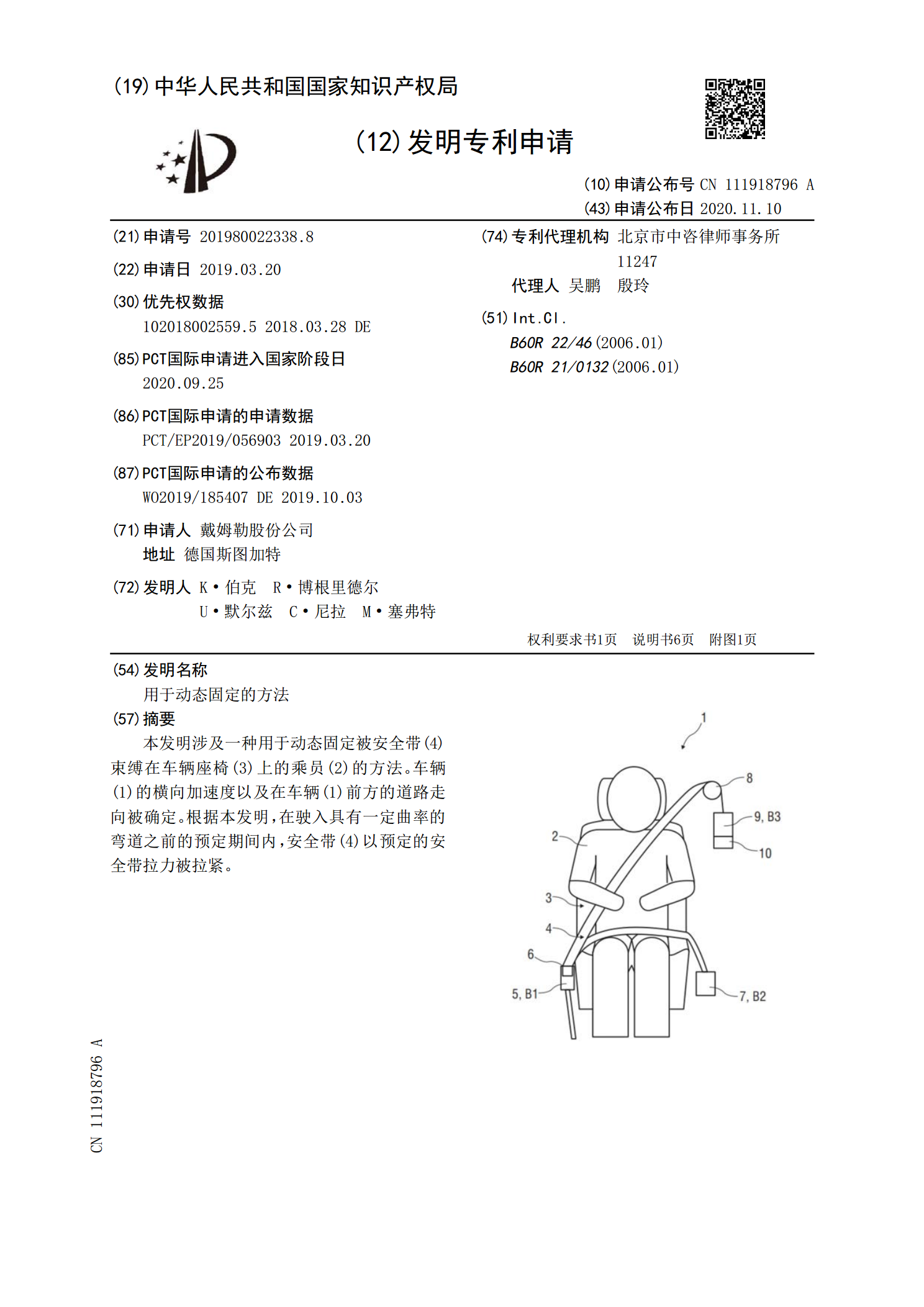
本发明涉及一种用于动态固定被安全带(4)束缚在车辆座椅(3)上的乘员(2)的方法。车辆(1)的横向加速度以及在车辆(1)前方的道路走向被确定。根据本发明,在驶入具有一定曲率的弯道之前的预定期间内,安全带(4)以预定的安全带拉力被拉紧。

颈前路动态固定板.pdf
本发明涉及一种颈前路动态固定板,包括第一接骨板和第二接骨板,第一接骨板与第二接骨板之间可限位伸缩和限位转动地嵌套连接,第一接骨板对应第二接骨板的一端设有连接板,连接板的两侧分别设有挂耳,第二接骨板内部设有容纳连接板的空腔,空腔两侧分别设有限位滑槽,连接板可限位转动地设置于空腔内部且所述挂耳可限位滑动地装套于限位滑槽中,第一接骨板和第二接骨板上对应患者颈前路待固定的各颈椎节段开有固定孔。本发明能够在保证颈椎固定节段稳定性的基础上,实现颈椎固定节段具有一定范围的伸缩活动和侧向弯曲活动,同时又能够避免过度活动,

一种颈椎动态固定钢板.pdf
一种颈椎动态固定钢板,涉及用于治疗骨或关节的装置,尤其涉及一种用于颈椎内固定的动态固定钢板,包括上锁定钢板,中锁定钢板和下锁定钢板,中锁定钢板两侧分别连接一块动态连接板,构成两副钟摆关节机构;上锁定钢板和下锁定钢板的内侧设有滑槽;动态连接板与滑槽滑动配合,构成两副直线滑槽机构;中锁定钢板通过两侧的钟摆关节机构和直线滑槽机构,中锁定钢板与上锁定钢板和下锁定钢板动态连接为一体,构成可伸缩和侧屈的颈椎动态固定钢板,解决了现有的颈椎钢板存在的术后椎体运动功能部分或完全丧失的问题,可以最大程度地保留目标椎体节段的活
基于消息更新范围固定的动态选择策略的LDPC码译码方法.pdf
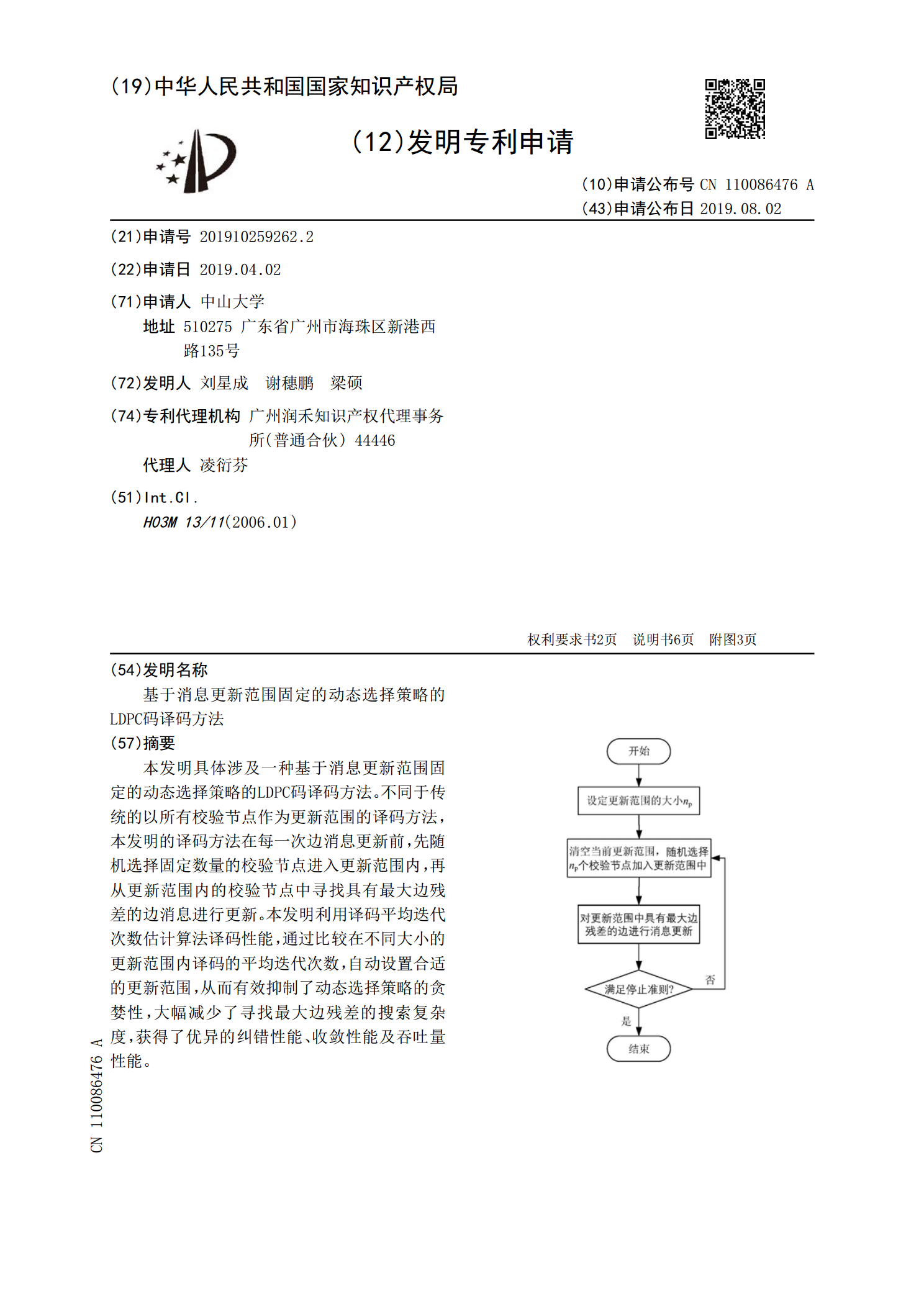
本发明具体涉及一种基于消息更新范围固定的动态选择策略的LDPC码译码方法。不同于传统的以所有校验节点作为更新范围的译码方法,本发明的译码方法在每一次边消息更新前,先随机选择固定数量的校验节点进入更新范围内,再从更新范围内的校验节点中寻找具有最大边残差的边消息进行更新。本发明利用译码平均迭代次数估计算法译码性能,通过比较在不同大小的更新范围内译码的平均迭代次数,自动设置合适的更新范围,从而有效抑制了动态选择策略的贪婪性,大幅减少了寻找最大边残差的搜索复杂度,获得了优异的纠错性能、收敛性能及吞吐量性能。