
一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法.pdf

是你****平呀


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法.pdf
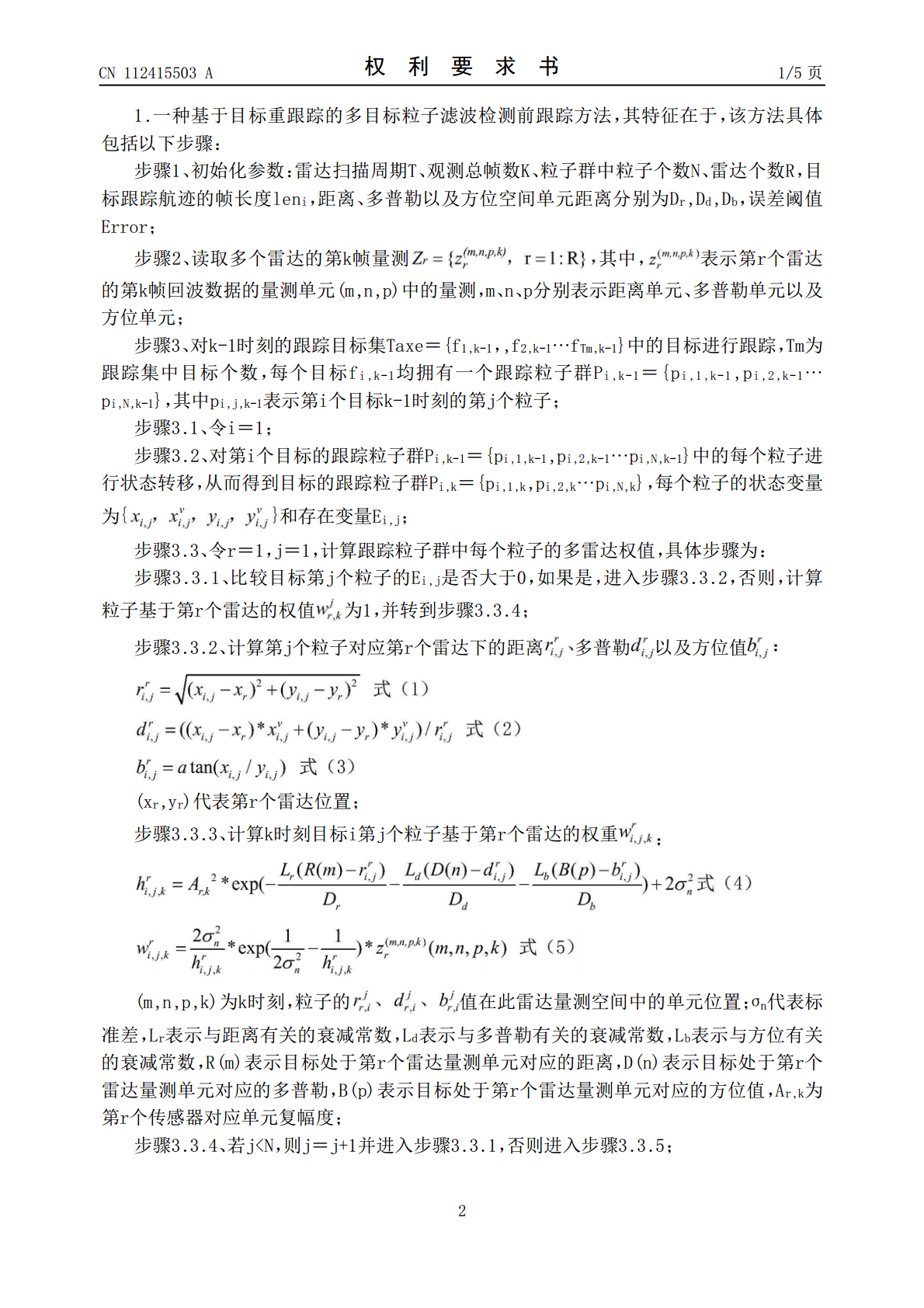
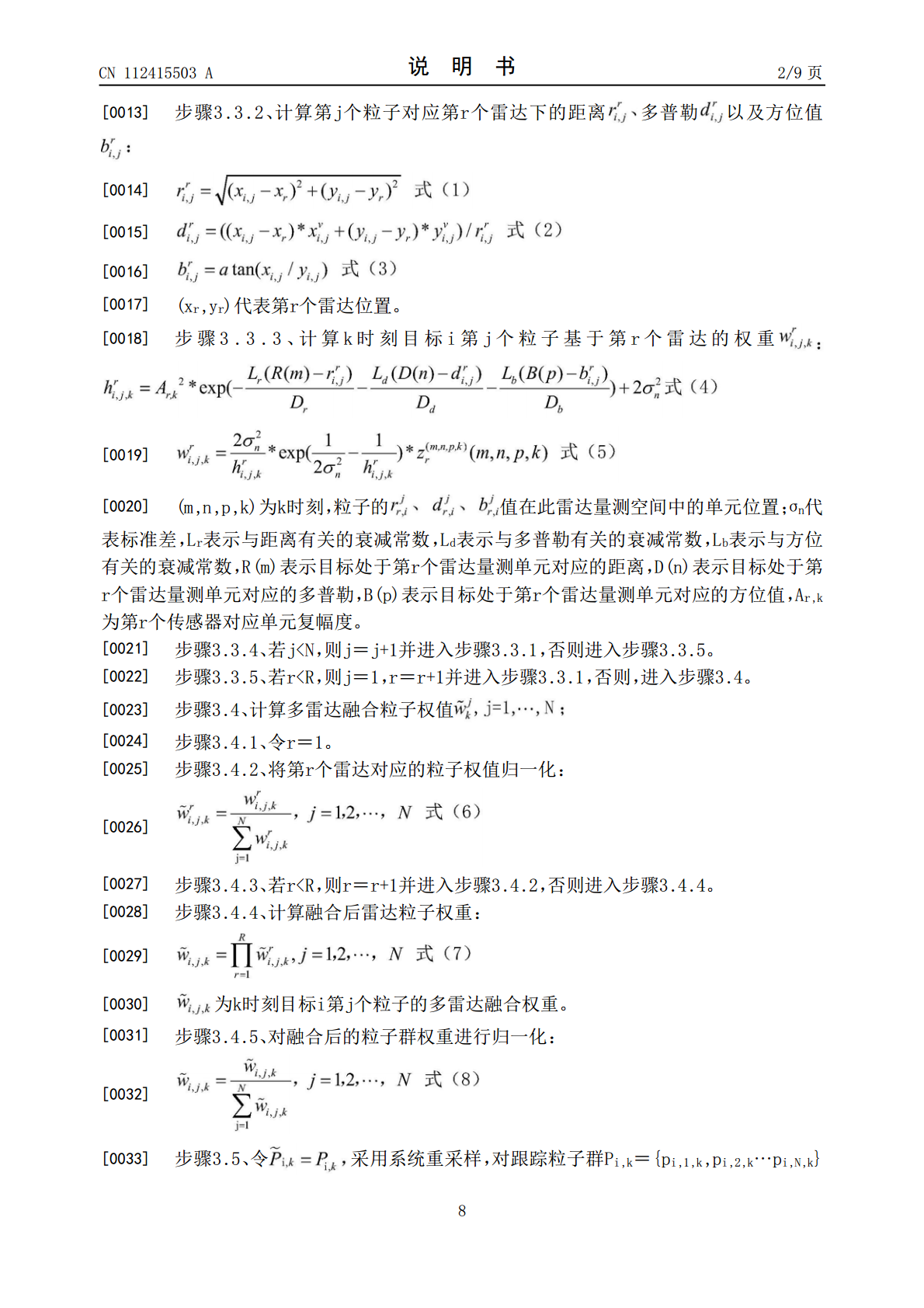
本发明公开了一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法,该方法在跟踪环节中,对已经跟踪完成且pb大于给定阈值的目标,按粒子权重值大小对跟踪粒子群按逆序进行排序,计算其前N/50个粒子的状态均值。以此状态均值为中心点,产生新的粒子,对跟踪粒子群的后0.98*N个粒子状态信息进行替换,粒子群存在值全置为1,保留了优质粒子,更新了粒子群,提高了粒子使用率,使跟踪点迹较快靠近真实目标,提高了目标的跟踪精度。此外,使虚假点迹更快接近真实目标,通过计算目标踪航迹长度len
一种基于粒子滤波的视频多目标跟踪方法.pdf
本发明公开了一种基于粒子滤波的视频多目标跟踪方法,通过深度学习模型检测视频中的目标,利用基于粒子滤波器进行目标位置预测,再对目标进行轨迹匹配,从而实现非线性运动目标鲁棒跟踪的方法。本发明采用非线性及非高斯方式去估计问题,能够提升算法的性能;能有效排除复杂背景的干扰,实现相对简单、对条件约束较小、算法运行效率高。

基于粒子滤波的检测前跟踪方法研究.docx
基于粒子滤波的检测前跟踪方法研究基于粒子滤波的检测前跟踪方法研究摘要:跟踪在计算机视觉领域中起到了重要的作用,而在实际应用中,研究跟踪方法的精度和速度就显得格外重要。本文提出了一种基于粒子滤波的检测前跟踪方法,该方法能够在检测前有效地跟踪目标,从而提高目标检测的精度和效率。实验结果表明,该方法在各种场景下都能够取得非常优秀的跟踪效果。关键词:计算机视觉,跟踪,粒子滤波,检测前跟踪1.介绍跟踪是计算机视觉领域中一个非常重要的问题,它的研究已经广泛应用于安防、智能交通系统、自动驾驶、虚拟现实等场景中。跟踪算法

基于Cubature粒子滤波检测前跟踪方法.docx
基于Cubature粒子滤波检测前跟踪方法标题:基于Cubature粒子滤波的检测前跟踪方法摘要:在目标识别和跟踪领域,Cubature粒子滤波已经得到了广泛的应用。本文针对传统的前向跟踪算法存在的问题,提出了一种基于Cubature粒子滤波的检测前跟踪方法。该方法将目标检测与跟踪相结合,通过引入Cubature粒子滤波算法来提高跟踪精度和鲁棒性。实验结果表明,所提出的方法在各项性能指标上均显著优于传统方法,在复杂场景下具有较高的准确性和鲁棒性。关键词:目标识别、前跟踪、Cubature粒子滤波、鲁棒性、

基于粒子滤波和背景减除的多目标检测与跟踪算法.docx
基于粒子滤波和背景减除的多目标检测与跟踪算法标题:基于粒子滤波和背景减除的多目标检测与跟踪算法摘要:多目标检测与跟踪在计算机视觉领域具有广泛的应用。本论文提出了一种基于粒子滤波和背景减除的多目标检测与跟踪算法。该算法通过引入粒子滤波和背景减除的方法,实现了对多目标在复杂背景下的准确检测和跟踪。实验证明,该算法具有较高的检测和跟踪精度,为实时目标检测和跟踪提供了一种有效的解决方案。1.引言随着计算机视觉领域的快速发展,多目标检测与跟踪成为了一个重要的研究课题。在许多实际应用场景中,如视频监控、交通管理、人机