
用于自动存储和取回系统的机会性充电系统.pdf

高格****gu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于自动存储和取回系统的机会性充电系统.pdf
公开了一种机会性导轨充电系统,用于在自动订单履行系统内对运输货物的移动机器人上的电源再充电。可以将各个充电器合并到每个移动机器人中,以将来自充电导轨的设施线路电压转换为每个移动机器人上的可再充电电源额定的电压。
自动存储和取回系统.pdf
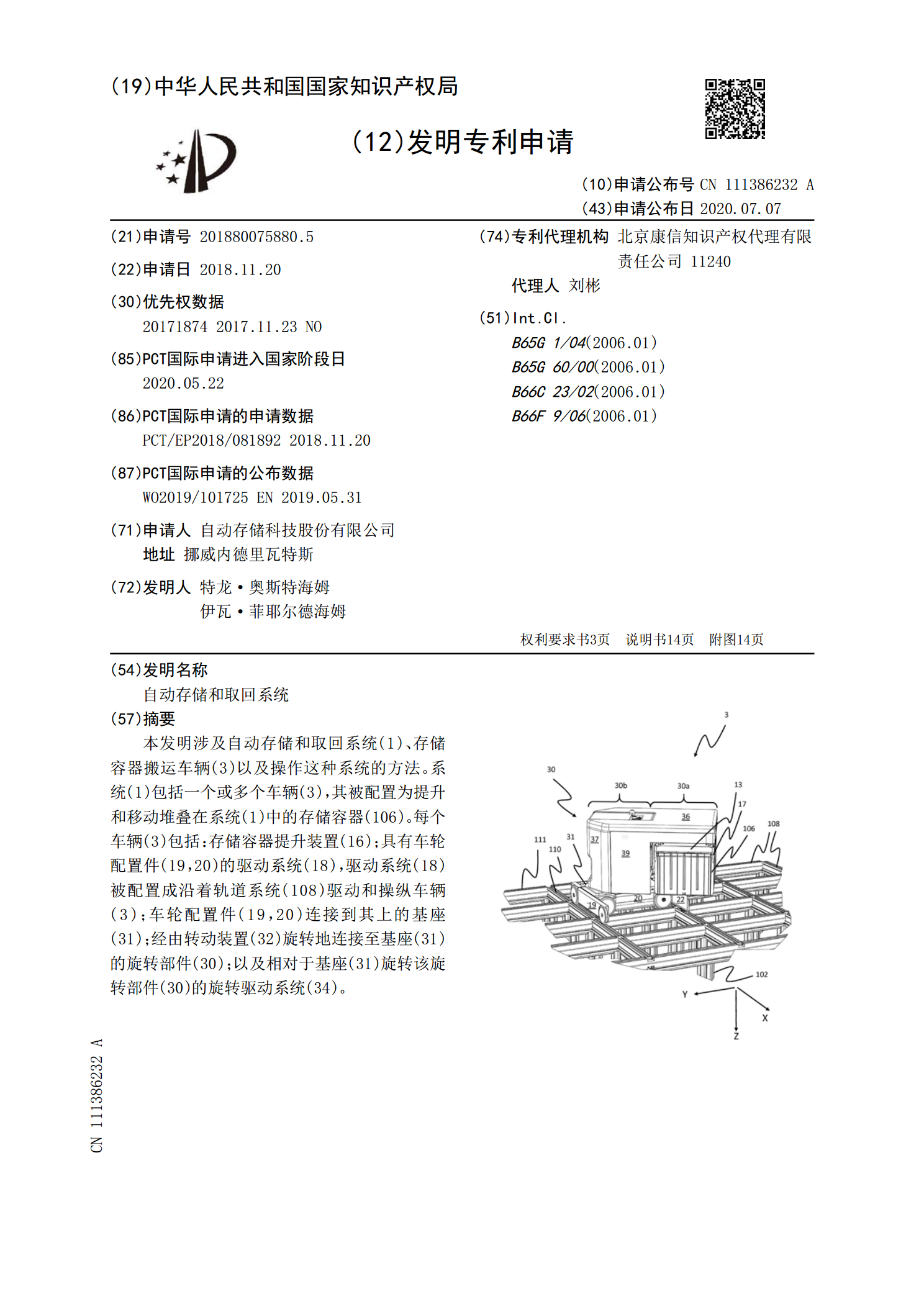
本发明涉及自动存储和取回系统(1)、存储容器搬运车辆(3)以及操作这种系统的方法。系统(1)包括一个或多个车辆(3),其被配置为提升和移动堆叠在系统(1)中的存储容器(106)。每个车辆(3)包括:存储容器提升装置(16);具有车轮配置件(19,20)的驱动系统(18),驱动系统(18)被配置成沿着轨道系统(108)驱动和操纵车辆(3);车轮配置件(19,20)连接到其上的基座(31);经由转动装置(32)旋转地连接至基座(31)的旋转部件(30);以及相对于基座(31)旋转该旋转部件(30)的旋转驱动系

自动存储和取回系统.pdf
本发明涉及一种自动存储和取回系统,包括:轨道系统,包括布置在水平面中并在第一方向上延伸的第一组平行轨道,以及布置在水平面中并在与第一方向正交的第二方向上延伸的第二组平行轨道,第一和第二组轨道在水平面中形成网格图案,该网格图案包括多个相邻的网格单元,每个网格单元包括由第一组轨道的一对相邻轨道和第二组轨道的一对相邻轨道限定的网格开口;存储容器的多个堆叠,布置在位于轨道系统下方的存储柱中,其中每个存储柱竖直地位于网格开口的下方;多个容器处理运载器,用于提升和移动堆在堆叠中的存储容器,这些容器处理运载器构造成在存

自动存储和取回系统.pdf
提供了一种方法和设备,用于将物品存储到多个目的地区域或从多个目的地区域取回物品。将物品装载到多个独立控制的运送车辆的其中一个上。运送车辆沿着通往目的地区域/从目的地区域的路径,目的地区域沿所述路径定位。目的地区域配置为使得目的地区域具有一深度,以沿水平线前后容纳多个容器。所述容器可以为可释放地互连的,以便取回其中一个互连的容器使一个或多个连接的容器移动。

自动化存储和取回系统.pdf
本发明涉及一种自动存储和取回系统,包括:轨道系统,包括布置在水平面中并在第一方向上延伸的第一组平行轨道,以及布置在水平面中并在与第一方向正交的第二方向上延伸的第二组平行轨道,第一和第二组轨道在水平面中形成网格图案,该网格图案包括多个相邻的网格单元,每个网格单元包括由第一组轨道的一对相邻轨道和第二组轨道的一对相邻轨道限定的网格开口;存储容器的多个堆叠,布置在位于轨道系统下方的存储柱中,其中每个存储柱竖直地位于网格开口的下方;多个容器处理运载器,用于提升和移动堆在堆叠中的存储容器,这些容器处理运载器构造成在存