
用于确定车辆位置的方法.pdf

Ja****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于确定车辆位置的方法.pdf
本发明涉及一种用于定位车辆(1)的方法。根据本发明,通过比较(VLM)用车辆(1)传感器系统测定的地标物(LMS)和在地图中、特别是在地图部分(KA)中存储的地标物(LMK),确定多个位置假设(PH)。通过分析所有位置假设(PH)并借助概率分析(PA)过滤掉所有错误信息,确定具有完整性值的位置假设(PHI)。通过根据预给定的限值的过滤(F)来确定具有以预定方式足以用于定位车辆(1)的位置精度的位置假设(PHP)。
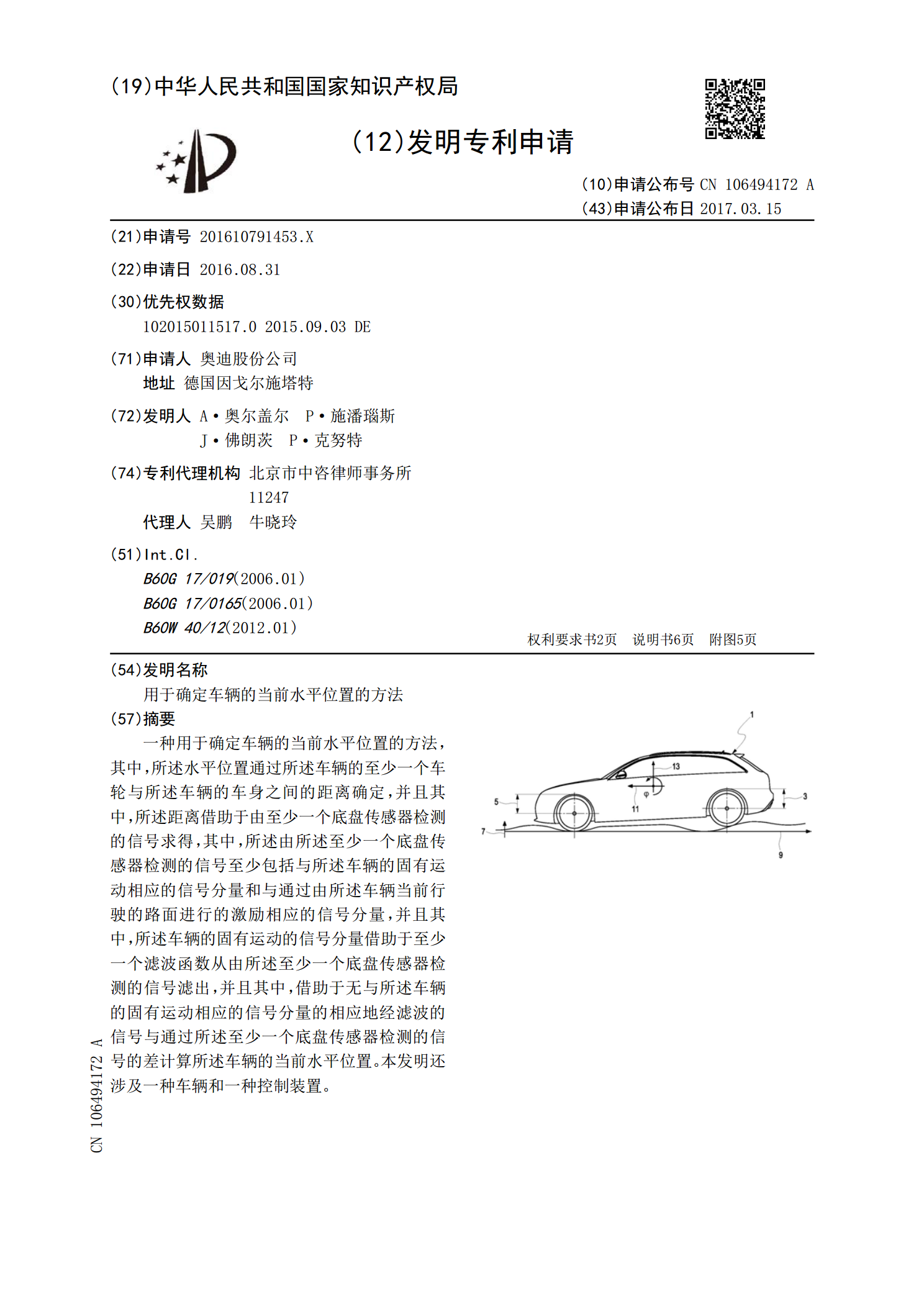
用于确定车辆的当前水平位置的方法.pdf
一种用于确定车辆的当前水平位置的方法,其中,所述水平位置通过所述车辆的至少一个车轮与所述车辆的车身之间的距离确定,并且其中,所述距离借助于由至少一个底盘传感器检测的信号求得,其中,所述由所述至少一个底盘传感器检测的信号至少包括与所述车辆的固有运动相应的信号分量和与通过由所述车辆当前行驶的路面进行的激励相应的信号分量,并且其中,所述车辆的固有运动的信号分量借助于至少一个滤波函数从由所述至少一个底盘传感器检测的信号滤出,并且其中,借助于无与所述车辆的固有运动相应的信号分量的相应地经滤波的信号与通过所述至少一个

确定车辆的车轮位置的方法.pdf
本发明涉及确定车辆(1)的每个配备有电子模块(3)的车轮(2)的位置的方法,由此,一方面为了确定车轮(2)的位置,车辆(1)装备有由至少两个靠近车轮(2)设置的并且物理补偿的发射天线(5、6)构成的电磁发射源,使得所述发射天线沿所述车轮的电子模块(3)的轨迹提供分开的阴影区域,并且在另一方面,指示发射天线(5、6)的连续的切换。

用于确定车辆相对于充电模块的位置的装置和方法.pdf
本发明涉及一种用于确定车辆(1)相对于设于车辆(1)的周围环境内且具有充电线圈的充电模块(2)的位置的装置和方法,该车辆具有能够借助线圈充电的储能器,其中,该装置包括摄像机系统(3),其中,设有数字大灯系统,其具有以距离(c)彼此间隔的左侧数字大灯(4)和右侧数字大灯(5),其中,两个数字大灯(4,5)中的每个均设计用于借助于扫描以不同的角度(α,β)投射数字光线(6),使得每次仅其中一个数字大灯(4,5)以相应确定的角度(α,β)发出光线(6),其中,该摄像机系统(3)设计用于探测光线(6)的由设于充电
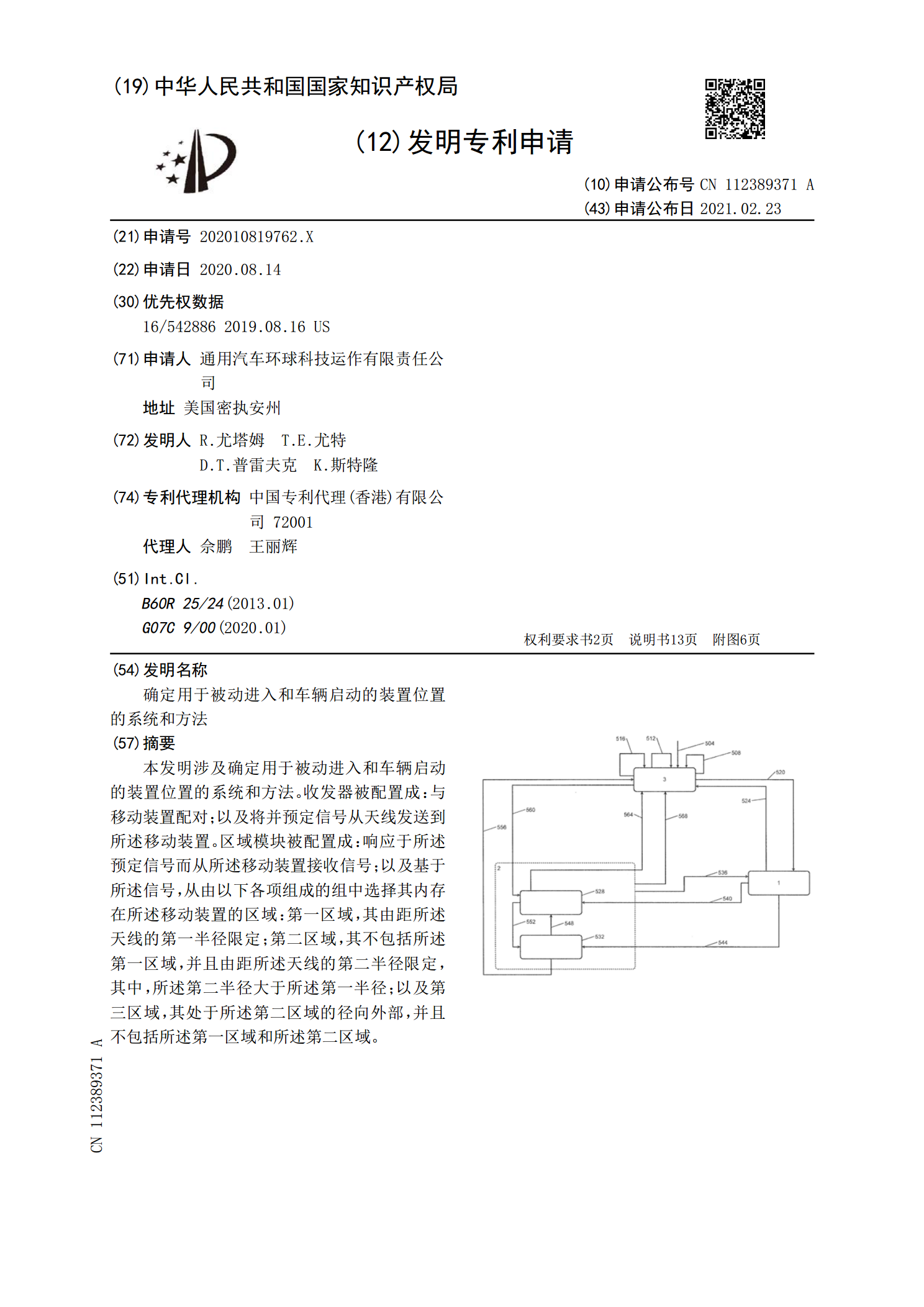
确定用于被动进入和车辆启动的装置位置的系统和方法.pdf
本发明涉及确定用于被动进入和车辆启动的装置位置的系统和方法。收发器被配置成:与移动装置配对;以及将并预定信号从天线发送到所述移动装置。区域模块被配置成:响应于所述预定信号而从所述移动装置接收信号;以及基于所述信号,从由以下各项组成的组中选择其内存在所述移动装置的区域:第一区域,其由距所述天线的第一半径限定;第二区域,其不包括所述第一区域,并且由距所述天线的第二半径限定,其中,所述第二半径大于所述第一半径;以及第三区域,其处于所述第二区域的径向外部,并且不包括所述第一区域和所述第二区域。