
一种基于自适应滤波的水下自主航行器导航方法.pdf

哲妍****彩妍


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于自适应滤波的水下自主航行器导航方法.pdf
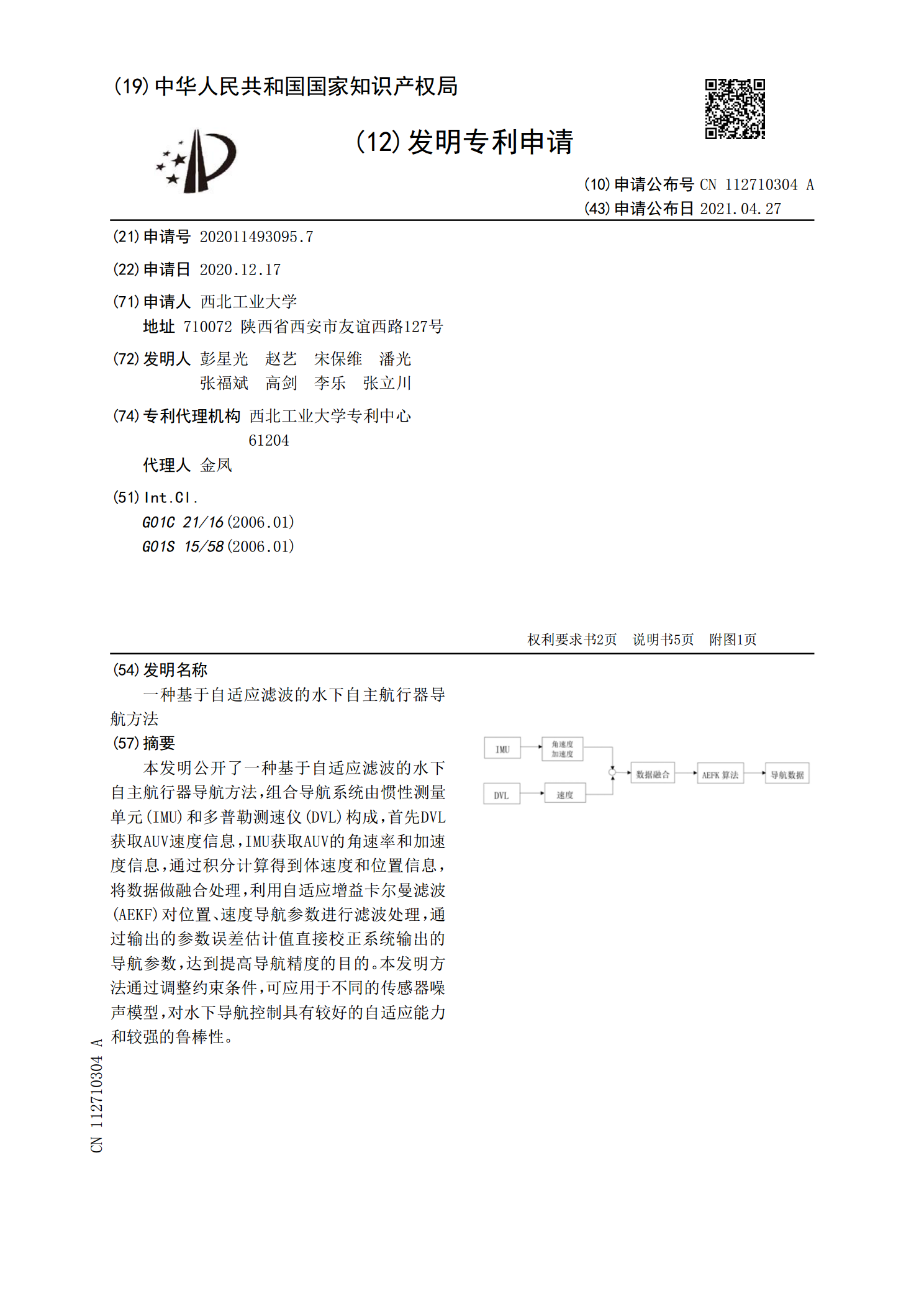
本发明公开了一种基于自适应滤波的水下自主航行器导航方法,组合导航系统由惯性测量单元(IMU)和多普勒测速仪(DVL)构成,首先DVL获取AUV速度信息,IMU获取AUV的角速率和加速度信息,通过积分计算得到体速度和位置信息,将数据做融合处理,利用自适应增益卡尔曼滤波(AEKF)对位置、速度导航参数进行滤波处理,通过输出的参数误差估计值直接校正系统输出的导航参数,达到提高导航精度的目的。本发明方法通过调整约束条件,可应用于不同的传感器噪声模型,对水下导航控制具有较好的自适应能力和较强的鲁棒性。

模糊自适应滤波算法在自主水下航行器组合导航系统中的应用.pptx
模糊自适应滤波算法在自主水下航行器组合导航系统中的应用目录添加章节标题模糊自适应滤波算法概述模糊逻辑与自适应滤波算法的结合模糊自适应滤波算法的基本原理模糊自适应滤波算法的优势自主水下航行器组合导航系统介绍自主水下航行器导航系统的重要性组合导航系统的基本构成组合导航系统的主要技术挑战模糊自适应滤波算法在组合导航系统中的应用模糊自适应滤波算法在姿态导航中的应用模糊自适应滤波算法在速度和位置导航中的应用模糊自适应滤波算法在多传感器数据融合中的应用模糊自适应滤波算法的性能评估算法的收敛性能分析算法的鲁棒性分析算法

自主水下航行器导航方法综述.docx
自主水下航行器导航方法综述自主水下航行器导航方法综述随着无人技术的不断发展,自主水下航行器的应用范围越来越广,已经成为海洋探测、资源勘探、海洋环境监测、水下作业等领域的重要设备。但是,由于在水下环境中,通信难度大、水下传感器精度有限、水下环境复杂等多方面因素的存在,导致自主水下航行器在水下导航中表现不如航空器和陆地车辆。因此,如何提高自主水下航行器的导航能力是一个重要的研究方向。一、水下环境的意义和复杂性水下环境与陆地和空气有着显著的区别。水下环境的介质是水,其密度比空气密度高800多倍,又因为水的性质,

基于UT变换改进多模型滤波的水下航行器导航方法.docx
基于UT变换改进多模型滤波的水下航行器导航方法一、引言水下航行器导航是水下作业和资源勘探等水下应用的关键技术之一。随着水下作业的加强和需求的增多,水下航行器导航的准确性和性能要求也越来越高。航行器单靠惯性测量仪器不足以满足导航精度的需求,因此需要使用多模型滤波器进行导航。UT变换是四种粒子滤波器中比较新的一种转换方法,具有高准确性、高鲁棒性与高效率的特点。本文结合UT变换的特点,对多模型滤波器进行改进,在水下航行器导航中使用UT变换改进多模型滤波器,提高水下航行器导航精度,极大地推动了水下航行器导航技术的

基于视线导航的自主水下航行器编队轨迹控制(英文).docx
基于视线导航的自主水下航行器编队轨迹控制(英文)Abstract:Underwaterautonomousnavigationishighlyanticipatedinvariousfields,suchasoceanexploration,pipelineinspection,andmilitarysurveillance.Inthispaper,weproposeavisualnavigationsystemthatutilizesimageprocessingandcontrolstrategies