
自主水下航行器导航方法综述.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自主水下航行器导航方法综述.docx
自主水下航行器导航方法综述自主水下航行器导航方法综述随着无人技术的不断发展,自主水下航行器的应用范围越来越广,已经成为海洋探测、资源勘探、海洋环境监测、水下作业等领域的重要设备。但是,由于在水下环境中,通信难度大、水下传感器精度有限、水下环境复杂等多方面因素的存在,导致自主水下航行器在水下导航中表现不如航空器和陆地车辆。因此,如何提高自主水下航行器的导航能力是一个重要的研究方向。一、水下环境的意义和复杂性水下环境与陆地和空气有着显著的区别。水下环境的介质是水,其密度比空气密度高800多倍,又因为水的性质,
一种基于自适应滤波的水下自主航行器导航方法.pdf
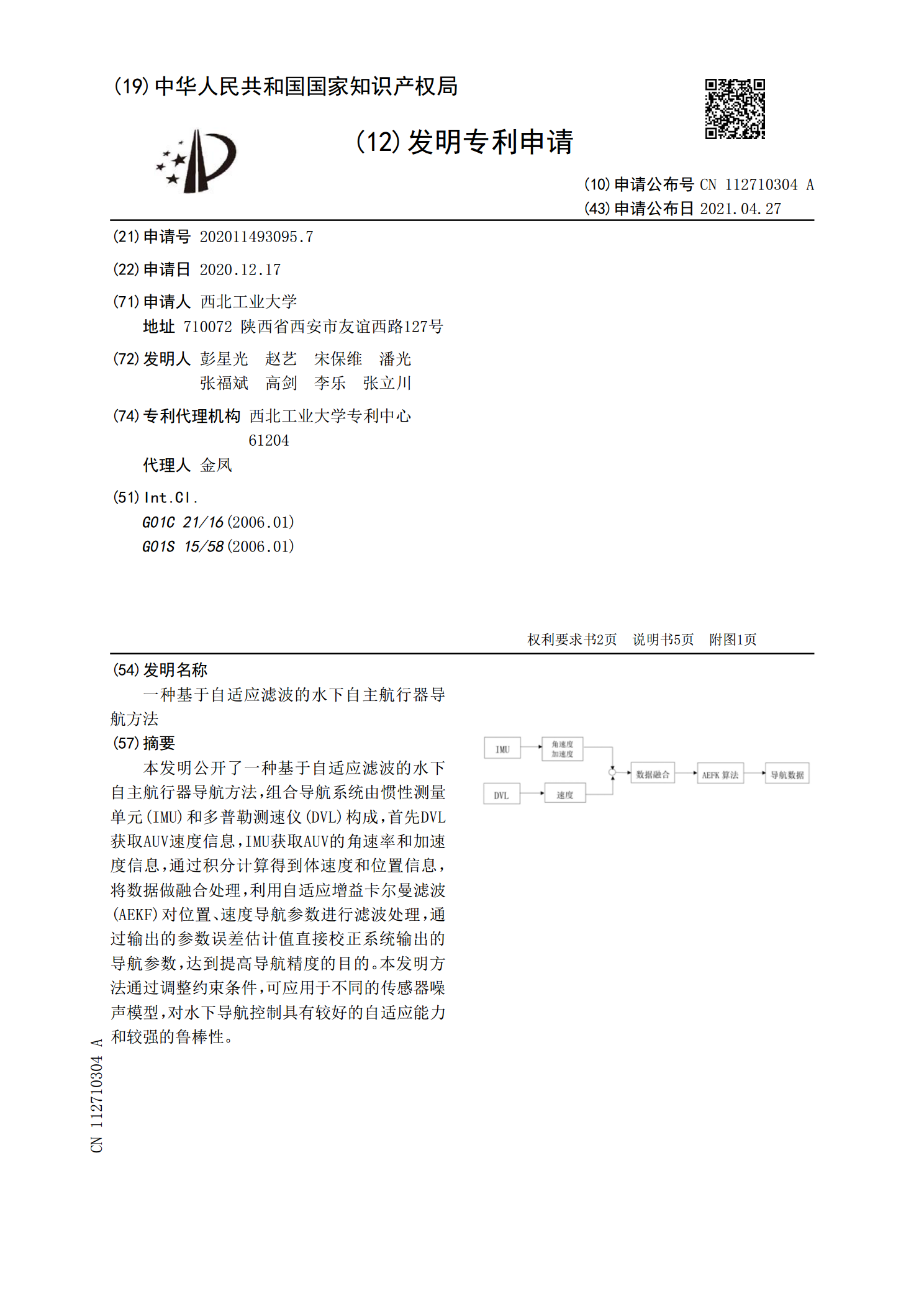
本发明公开了一种基于自适应滤波的水下自主航行器导航方法,组合导航系统由惯性测量单元(IMU)和多普勒测速仪(DVL)构成,首先DVL获取AUV速度信息,IMU获取AUV的角速率和加速度信息,通过积分计算得到体速度和位置信息,将数据做融合处理,利用自适应增益卡尔曼滤波(AEKF)对位置、速度导航参数进行滤波处理,通过输出的参数误差估计值直接校正系统输出的导航参数,达到提高导航精度的目的。本发明方法通过调整约束条件,可应用于不同的传感器噪声模型,对水下导航控制具有较好的自适应能力和较强的鲁棒性。

基于超短基线的水下自主航行器回收导航策略的研究与仿真.docx
基于超短基线的水下自主航行器回收导航策略的研究与仿真摘要在水下自主航行器的发展中,如何实现回收导航成为了一个重要的问题。超短基线技术因其在水下环境下的优越性而被广泛应用,本文利用超短基线技术研究实现水下自主航行器回收导航的策略,并进行仿真实验,结果表明,该策略可以有效地解决回收导航问题,提高导航精度与效率。关键词:超短基线,水下自主航行器,回收导航,策略,仿真实验1.引言随着现代化技术的发展,水下自主航行器的应用越来越广泛,其在海洋勘探、环境监测、资源开发等领域发挥着重要作用。但是,在水下航行过程中,水下
小型水下航行器组合导航装置及位置校正方法.pdf
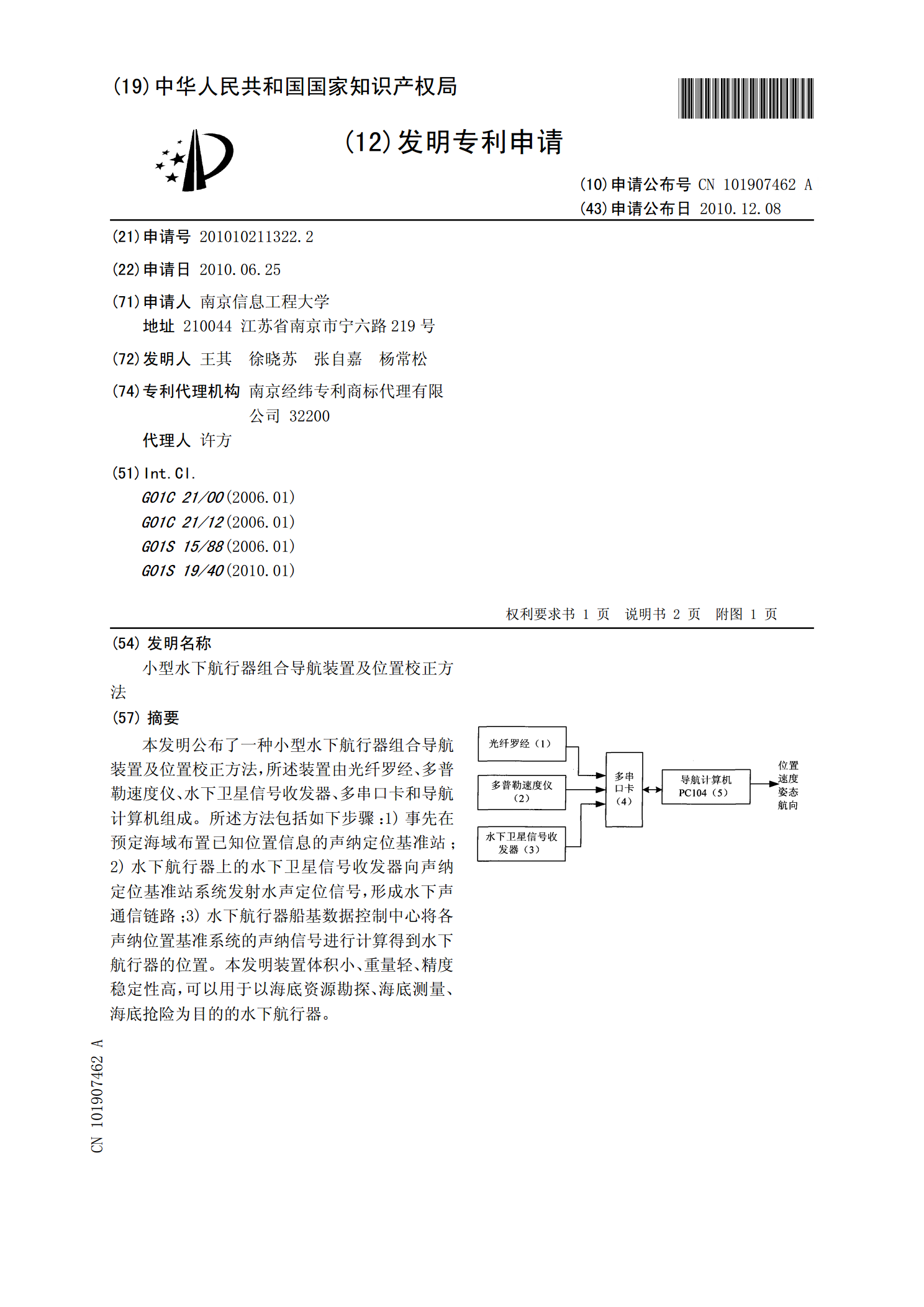
本发明公布了一种小型水下航行器组合导航装置及位置校正方法,所述装置由光纤罗经、多普勒速度仪、水下卫星信号收发器、多串口卡和导航计算机组成。所述方法包括如下步骤:1)事先在预定海域布置已知位置信息的声纳定位基准站;2)水下航行器上的水下卫星信号收发器向声纳定位基准站系统发射水声定位信号,形成水下声通信链路;3)水下航行器船基数据控制中心将各声纳位置基准系统的声纳信号进行计算得到水下航行器的位置。本发明装置体积小、重量轻、精度稳定性高,可以用于以海底资源勘探、海底测量、海底抢险为目的的水下航行器。

小型自主水下航行器目标跟踪控制方法研究.docx
小型自主水下航行器目标跟踪控制方法研究随着水下科学技术的不断发展,小型自主水下航行器(AUV)在海洋探测、水下采样等领域扮演着重要角色。针对小型自主水下航行器在执行特定任务时需要准确跟踪目标的需求,本文将就小型自主水下航行器目标跟踪控制方法进行研究。一、小型自主水下航行器目标跟踪控制方法概述目标跟踪控制可以理解为目标检测、目标跟踪以及控制等多个环节的综合应用,目的在于使AUV能够精准地跟踪目标、实现自主导航和控制,从而完成特定任务。目标跟踪控制方法主要分为传感器数据处理、目标检测及目标跟踪三个环节。(一)