
模糊自适应滤波算法在自主水下航行器组合导航系统中的应用.pptx

快乐****蜜蜂


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

模糊自适应滤波算法在自主水下航行器组合导航系统中的应用.pptx
模糊自适应滤波算法在自主水下航行器组合导航系统中的应用目录添加章节标题模糊自适应滤波算法概述模糊逻辑与自适应滤波算法的结合模糊自适应滤波算法的基本原理模糊自适应滤波算法的优势自主水下航行器组合导航系统介绍自主水下航行器导航系统的重要性组合导航系统的基本构成组合导航系统的主要技术挑战模糊自适应滤波算法在组合导航系统中的应用模糊自适应滤波算法在姿态导航中的应用模糊自适应滤波算法在速度和位置导航中的应用模糊自适应滤波算法在多传感器数据融合中的应用模糊自适应滤波算法的性能评估算法的收敛性能分析算法的鲁棒性分析算法

模糊自适应滤波在车载组合导航系统中的应用.docx
模糊自适应滤波在车载组合导航系统中的应用随着科学技术不断发展,车载组合导航系统已经成为我们日常生活中不可或缺的一部分。如果您曾经使用过车载导航,您可能会发现在某些情况下,导航系统提供的地理位置信息可能会失真或错误。这不仅会影响驾驶者的驾驶体验,而且可能会导致车辆迷失方向,增加了驾驶风险。这些问题的一个常见原因是GPS信号受到干扰或遮挡。解决这个问题的一个有效方法是使用模糊自适应滤波技术。模糊自适应滤波技术是一种可用于数据处理的先进技术。与其他传统滤波方法相比,它具有更好的自适应性、非线性特性和更好的稳健性

模糊自适应Kalman滤波在INSGPS组合导航系统中的应用.docx
模糊自适应Kalman滤波在INSGPS组合导航系统中的应用随着空间技术和导航技术的快速发展,组合导航系统已经成为了卫星导航领域的重要研究方向之一。INSGPS组合导航系统是将惯性导航系统(INS)和全球定位系统(GPS)结合起来,实现高精度的导航定位。但是,由于INS的误差会随时间累计,因此需要采用滤波算法对INS输出进行修正,以获得更精确的导航定位结果。Kalman滤波是一种线性系统状态估计算法,它通过组合测量数据和系统模型来估计系统的状态,并用估计值更新系统状态。但是,Kalman滤波需要准确的先验
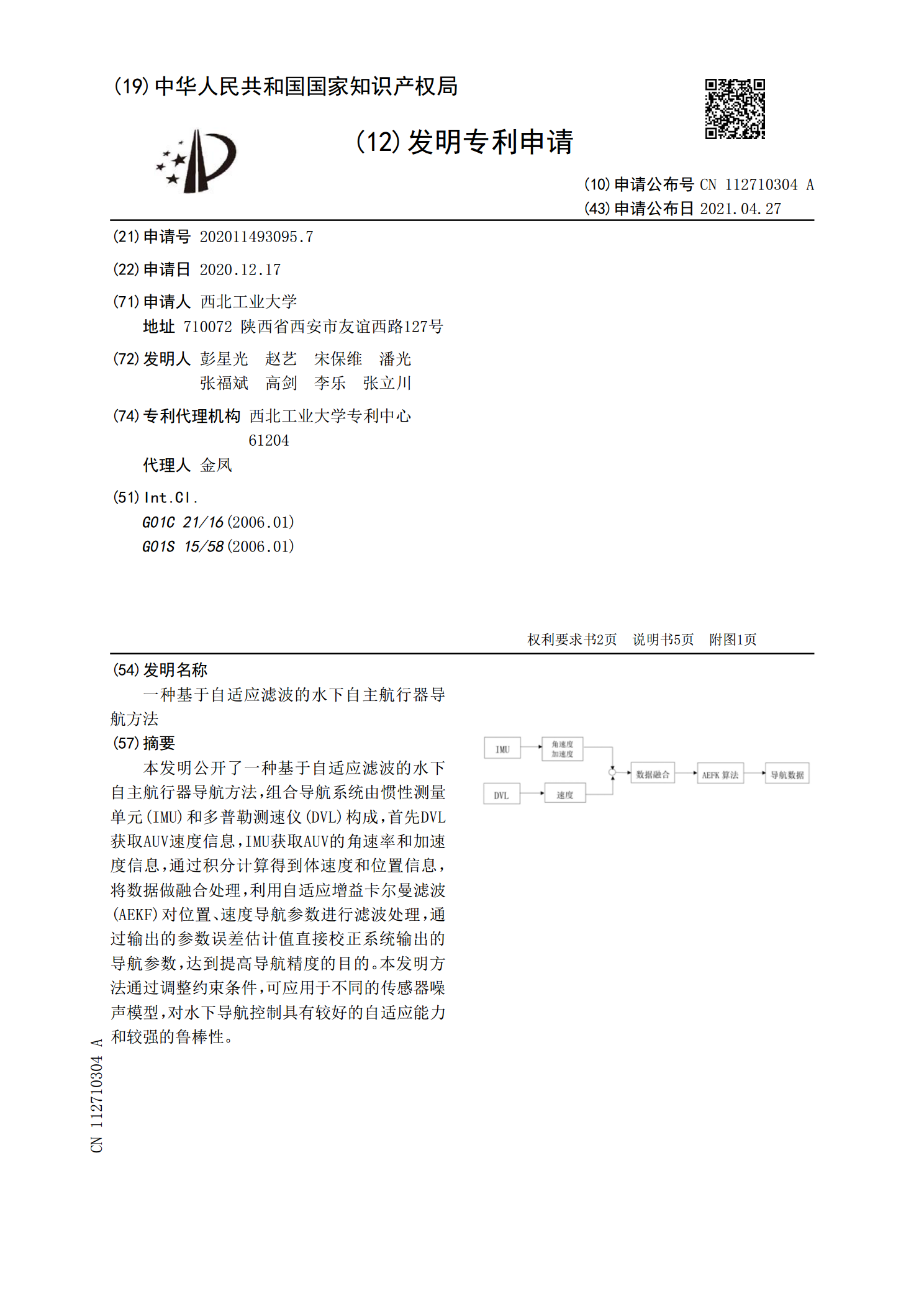
一种基于自适应滤波的水下自主航行器导航方法.pdf
本发明公开了一种基于自适应滤波的水下自主航行器导航方法,组合导航系统由惯性测量单元(IMU)和多普勒测速仪(DVL)构成,首先DVL获取AUV速度信息,IMU获取AUV的角速率和加速度信息,通过积分计算得到体速度和位置信息,将数据做融合处理,利用自适应增益卡尔曼滤波(AEKF)对位置、速度导航参数进行滤波处理,通过输出的参数误差估计值直接校正系统输出的导航参数,达到提高导航精度的目的。本发明方法通过调整约束条件,可应用于不同的传感器噪声模型,对水下导航控制具有较好的自适应能力和较强的鲁棒性。

水下航行器组合导航系统关键技术的研究.docx
水下航行器组合导航系统关键技术的研究水下航行器组合导航系统关键技术的研究摘要:随着水下航行器的广泛应用,水下组合导航系统成为了水下航行器研究领域的重要研究方向。本论文主要围绕水下航行器组合导航系统的关键技术展开研究,包括传感器融合、环境地图构建、姿态估计等方面。通过对这些关键技术的研究,可以有效提高水下航行器的导航精度和可靠性,为水下工程、海洋科学研究等领域提供有力的技术支持。关键词:水下航行器;组合导航系统;传感器融合;环境地图构建;姿态估计1.引言水下航行器是一种能够在水下环境中自主航行的机器人,广泛