
具有基于阀电流的高度测量系统的铣刨机.pdf

是浩****32


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有基于阀电流的高度测量系统的铣刨机.pdf
一种铣刨机,其可具有框架、附接到框架的铣刨鼓以及地面接合履带,地面接合履带支承框架且沿向前或向后方向推进铣刨机。铣刨机可以具有将框架连接到履带的高度可调节致动器。每个致动器可具有附接到框架的缸,可滑动地设置在缸内的活塞,以及杆,所述杆在第一端处连接到活塞且在第二端处连接到履带。铣刨机可具有储存液压流体的储罐和将储罐连接到缸的流体导管。铣刨机可具有选择性地控制流体导管中的液压流体的流速的控制阀。铣刨机还可以具有控制器,控制器基于流速确定框架相对于地面表面的高度。

具有基于流体流的高度测量系统的铣刨机.pdf
一种铣刨机,其可具有框架、附接到框架的铣刨鼓以及地面接合履带,地面接合履带支承框架且沿向前或向后方向推进铣刨机。铣刨机可具有存储液压流体的储罐。铣刨机还可以具有将框架连接到履带的至少一个致动器。致动器可以调节框架相对于地面表面的高度。流体导管可将储罐连接到致动器。铣刨机可以在流体导管中具有流动传感器。流动传感器可以确定与进入或离开致动器的液压流体流相关联的流动参数。铣刨机还可以具有控制器,控制器基于流动参数确定框架相对于地面表面的高度。
具有非接触式支腿高度测量系统的铣刨机.pdf
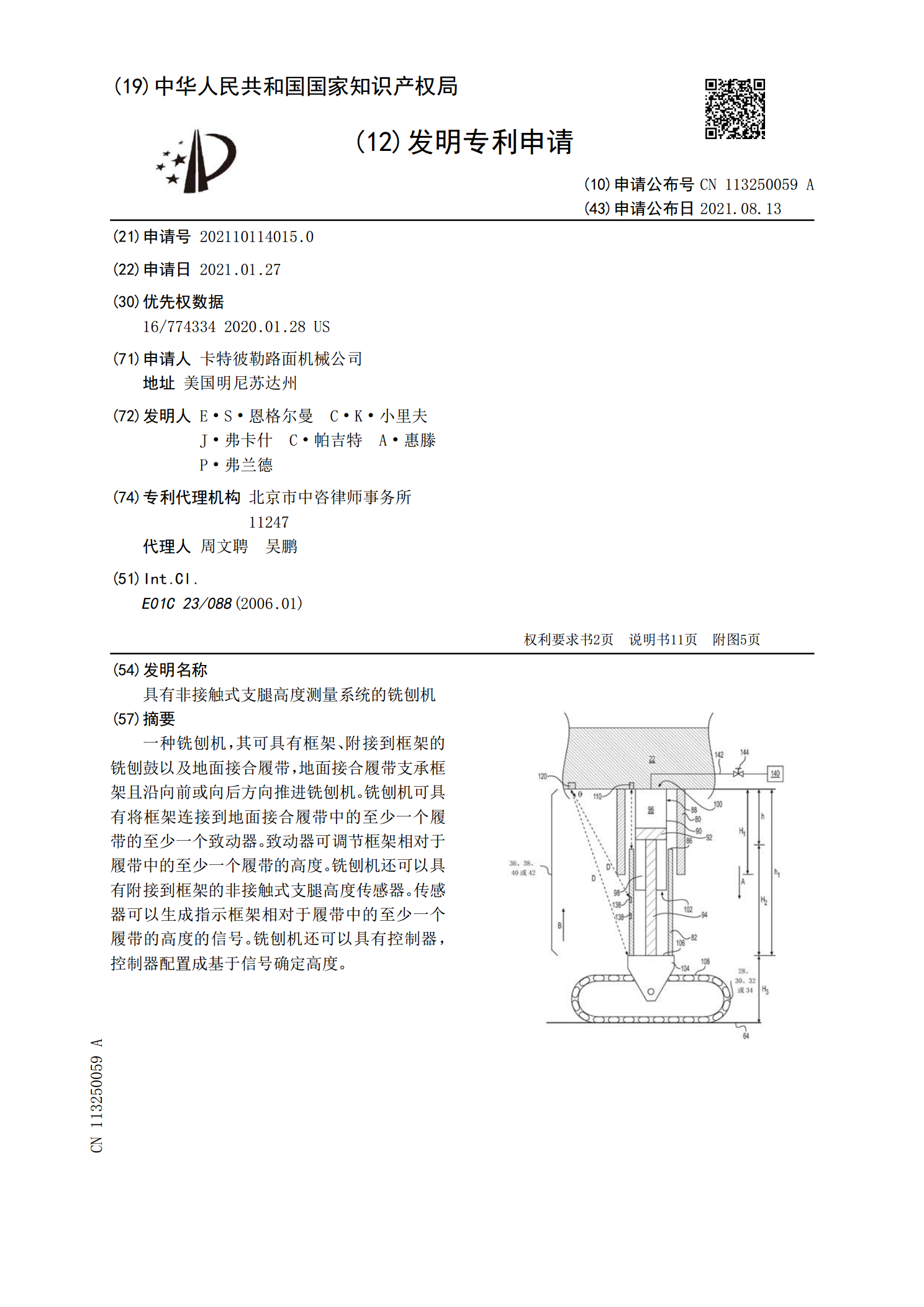
一种铣刨机,其可具有框架、附接到框架的铣刨鼓以及地面接合履带,地面接合履带支承框架且沿向前或向后方向推进铣刨机。铣刨机可具有将框架连接到地面接合履带中的至少一个履带的至少一个致动器。致动器可调节框架相对于履带中的至少一个履带的高度。铣刨机还可以具有附接到框架的非接触式支腿高度传感器。传感器可以生成指示框架相对于履带中的至少一个履带的高度的信号。铣刨机还可以具有控制器,控制器配置成基于信号确定高度。

具有液压阻尼系统的铣刨机.pdf
本发明公开了一种铣刨机。铣刨机可具有框架、连接到框架的第一端的第一履带和第二履带、连接到框架的第二端的第三履带以及附接到框架的铣刨鼓。铣刨机可以具有分别连接框架与第一履带、第二履带和第三履带的第一致动器、第二致动器和第三致动器。每个致动器可以调节框架相对于第一履带、第二履带和第三履带中的相应一个履带的高度。铣刨机可包括附接到第一致动器和第二致动器中的每一个致动器的阻尼器组件。阻尼器组件可以具有连接到第一致动器和第二致动器中的相应一个致动器的蓄能器,以及用于控制蓄能器与第一致动器和第二致动器中的相应一个致动

铣刨机产率测量系统.pdf
公开了一种用于具有传送带的铣刨机的产率测量系统。该产率测量系统可以包括配置成推动所述传送带的液压马达;配置成产生第一信号的第一传感器,所述第一信号指示所述传送带正在移动的材料作用于传送带的力;以及配置成产生第二信号的第二传感器,所述第二信号指示跨所述液压马达的压力差。该产率测量系统还可以包括与第一和第二传感器通信的控制器。该控制器可以被配置成基于第二信号判断传送带何时没有正在传送材料,并在传送带没有正在传送材料时基于第一信号自动地重新校准产率测量系统。