
自动驾驶车道保持方法、装置、终端设备及存储介质.pdf

书生****瑞梦

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动驾驶车道保持方法、装置、终端设备及存储介质.pdf
本公开涉及车辆技术领域,尤其涉及一种自动驾驶车道保持方法、装置、终端设备及存储介质。所述方法:获取处于车道保持状态的待转向的车辆的车道信息,车道信息用于指示车辆的车路偏差情况;获取车辆的转向控制参数,转向控制参数是基于车辆的样本车道信息和样本转向信息进行自学习得到的参数;根据车道信息和转向控制参数,确定车辆的转向信息,转向信息用于控制车辆在转向过程中进行车道保持。本公开实施例通过根据自学习得到的转向控制信息和用于指示车路偏差的车道信息,能够准确地确定出车辆的转向信息,从而提高了车道保持功能,提高了车辆控制

车道保持方法、装置、设备、介质及系统.pdf
本发明实施例公开了一种车道保持方法、装置、设备、介质及系统。该方法包括:获取目标车辆的车辆行驶数据,将包括转向盘转角、车辆横向位置以及车辆横向加速度的车辆行驶数据输入至预先训练的驾驶风格辨识模型中,得到驾驶风格辨识模型输出的目标车辆对应的驾驶风格类别,确定出用户的驾驶风格,进而根据驾驶风格类别和目标车辆的车辆状态数据,确定目标车辆的目标转向盘转角,基于该目标转向盘转角调整目标车辆的转向盘转角,以控制车辆回归至车道中心线位置,实现了基于用户驾驶风格的车道保持控制,满足了不同驾驶习惯的驾驶人的差异化需求,极大
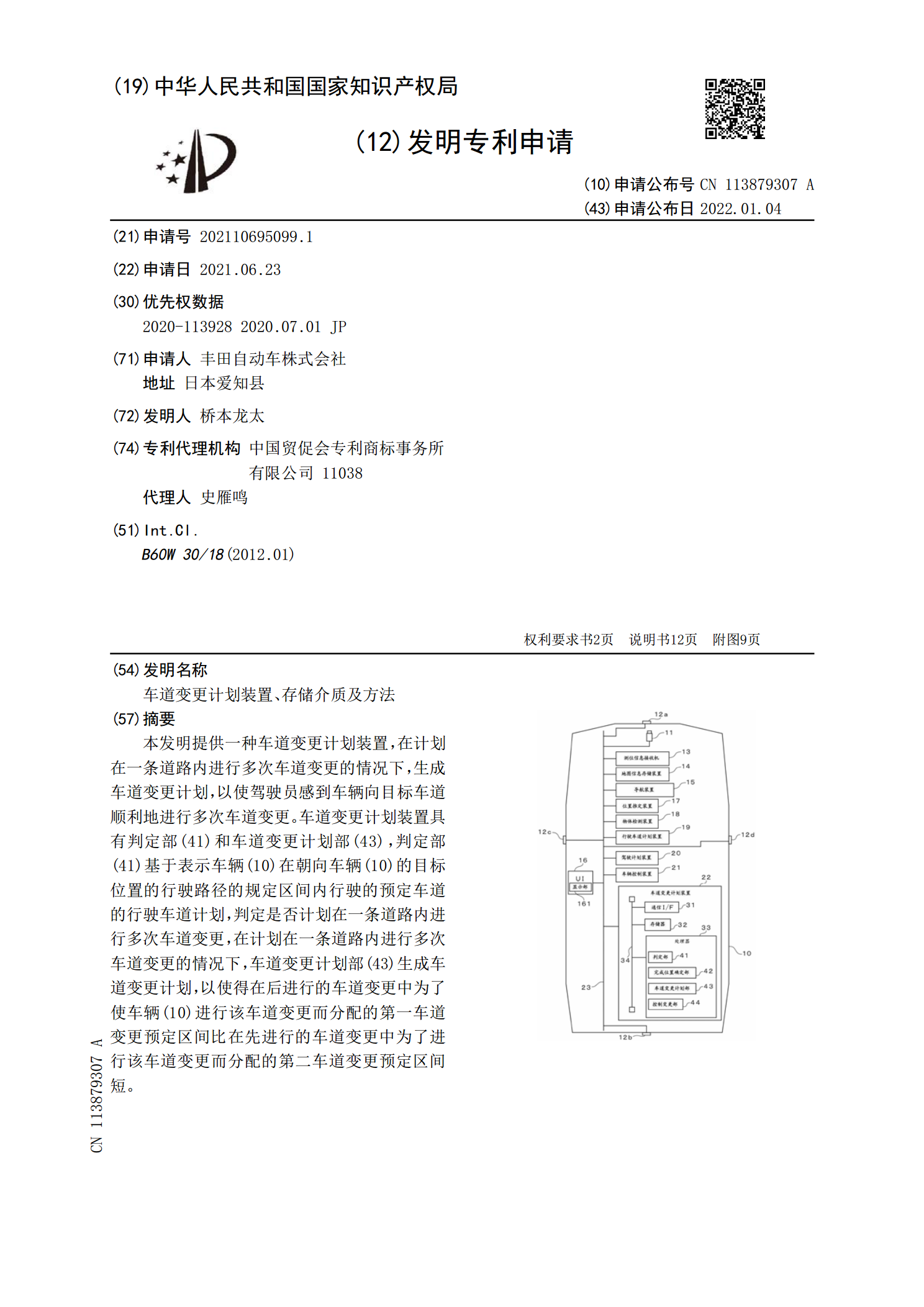
车道变更计划装置、存储介质及方法.pdf
本发明提供一种车道变更计划装置,在计划在一条道路内进行多次车道变更的情况下,生成车道变更计划,以使驾驶员感到车辆向目标车道顺利地进行多次车道变更。车道变更计划装置具有判定部(41)和车道变更计划部(43),判定部(41)基于表示车辆(10)在朝向车辆(10)的目标位置的行驶路径的规定区间内行驶的预定车道的行驶车道计划,判定是否计划在一条道路内进行多次车道变更,在计划在一条道路内进行多次车道变更的情况下,车道变更计划部(43)生成车道变更计划,以使得在后进行的车道变更中为了使车辆(10)进行该车道变更而分配
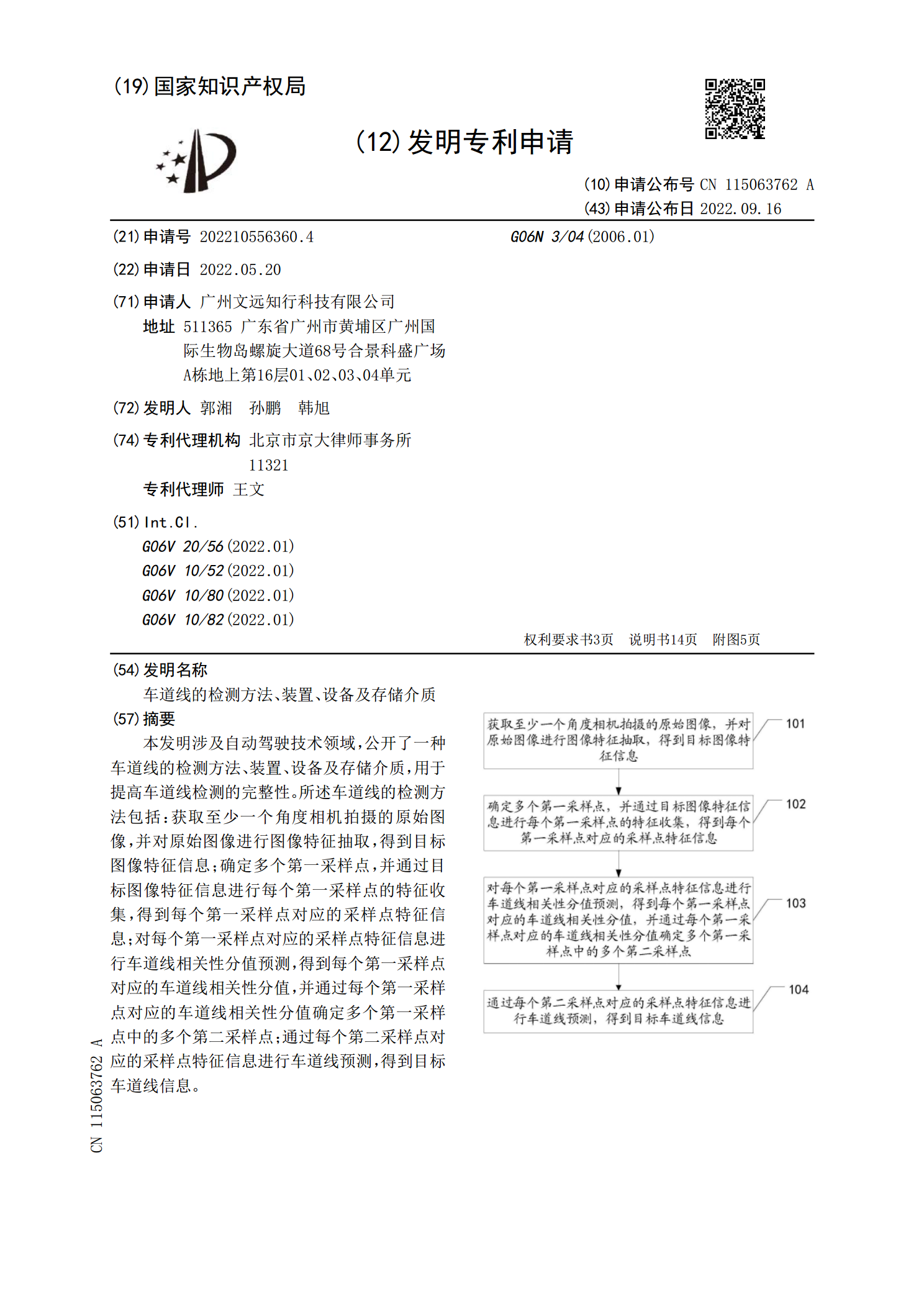
车道线的检测方法、装置、设备及存储介质.pdf
本发明涉及自动驾驶技术领域,公开了一种车道线的检测方法、装置、设备及存储介质,用于提高车道线检测的完整性。所述车道线的检测方法包括:获取至少一个角度相机拍摄的原始图像,并对原始图像进行图像特征抽取,得到目标图像特征信息;确定多个第一采样点,并通过目标图像特征信息进行每个第一采样点的特征收集,得到每个第一采样点对应的采样点特征信息;对每个第一采样点对应的采样点特征信息进行车道线相关性分值预测,得到每个第一采样点对应的车道线相关性分值,并通过每个第一采样点对应的车道线相关性分值确定多个第一采样点中的多个第二采
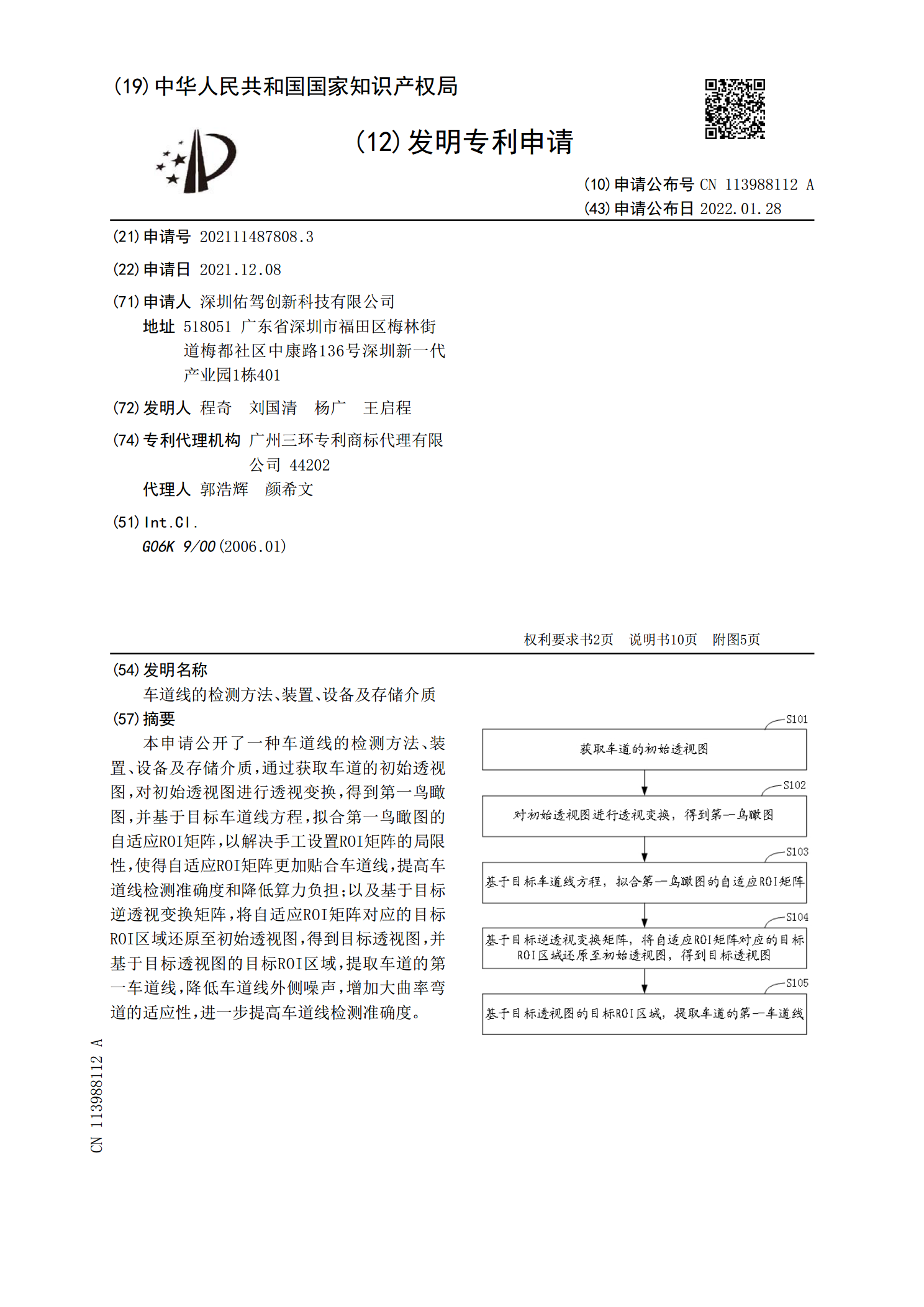
车道线的检测方法、装置、设备及存储介质.pdf
本申请公开了一种车道线的检测方法、装置、设备及存储介质,通过获取车道的初始透视图,对初始透视图进行透视变换,得到第一鸟瞰图,并基于目标车道线方程,拟合第一鸟瞰图的自适应ROI矩阵,以解决手工设置ROI矩阵的局限性,使得自适应ROI矩阵更加贴合车道线,提高车道线检测准确度和降低算力负担;以及基于目标逆透视变换矩阵,将自适应ROI矩阵对应的目标ROI区域还原至初始透视图,得到目标透视图,并基于目标透视图的目标ROI区域,提取车道的第一车道线,降低车道线外侧噪声,增加大曲率弯道的适应性,进一步提高车道线检测准确