
一种运动灵活稳定的机器人关节及具有该关节的机器人.pdf

明钰****甜甜


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种运动灵活稳定的机器人关节及具有该关节的机器人.pdf
本发明公开了一种运动灵活稳定的机器人关节,包括可发生相对转动的第一组件和第二组件,所述第一组件上固定设置有电机,所述电机连接有减速器,所述减速器设置有输出轴,所述第二组件上固定设置有连接柱,所述连接柱和输出轴通过传动装置连接,所述关节还包括控制装置和用以检测第一组件或第二组件位置的传感器,所述控制装置与所述电机、传感器电连接,通过传动装置连接输出轴与连接柱,可将电机设置在离关节较远的地方,调节更加灵活;采用传动装置连接来替代现有的直接啮合传动,且应用减速器控制输出轴的转速,使传动更加平稳。本发明还提供一种
机器人关节和具有至少一个这种机器人关节的机器人.pdf
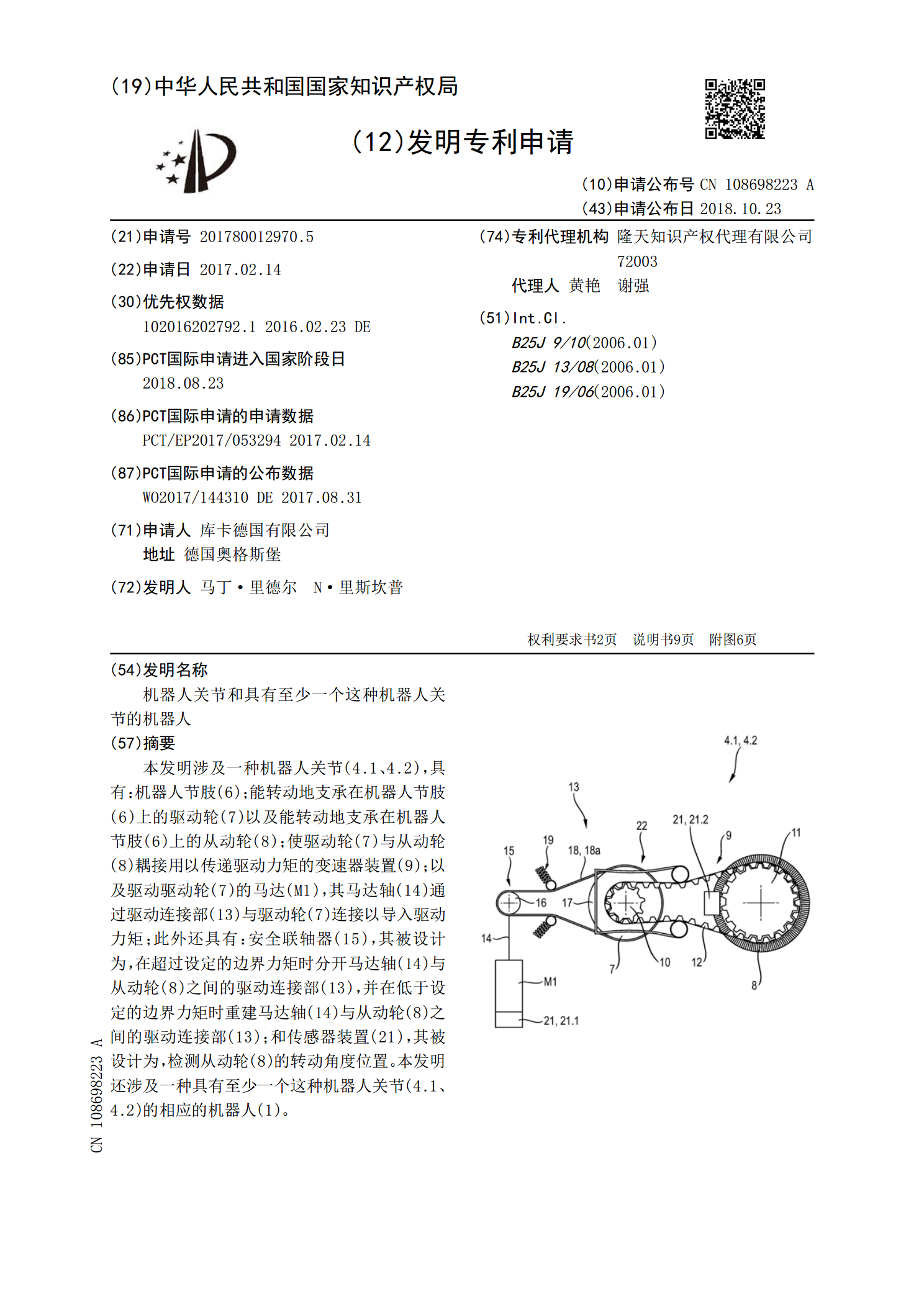
本发明涉及一种机器人关节(4.1、4.2),具有:机器人节肢(6);能转动地支承在机器人节肢(6)上的驱动轮(7)以及能转动地支承在机器人节肢(6)上的从动轮(8);使驱动轮(7)与从动轮(8)耦接用以传递驱动力矩的变速器装置(9);以及驱动驱动轮(7)的马达(M1),其马达轴(14)通过驱动连接部(13)与驱动轮(7)连接以导入驱动力矩;此外还具有:安全联轴器(15),其被设计为,在超过设定的边界力矩时分开马达轴(14)与从动轮(8)之间的驱动连接部(13),并在低于设定的边界力矩时重建马达轴(14)与
一种舵机及带有该舵机的机器人关节及机器人.pdf
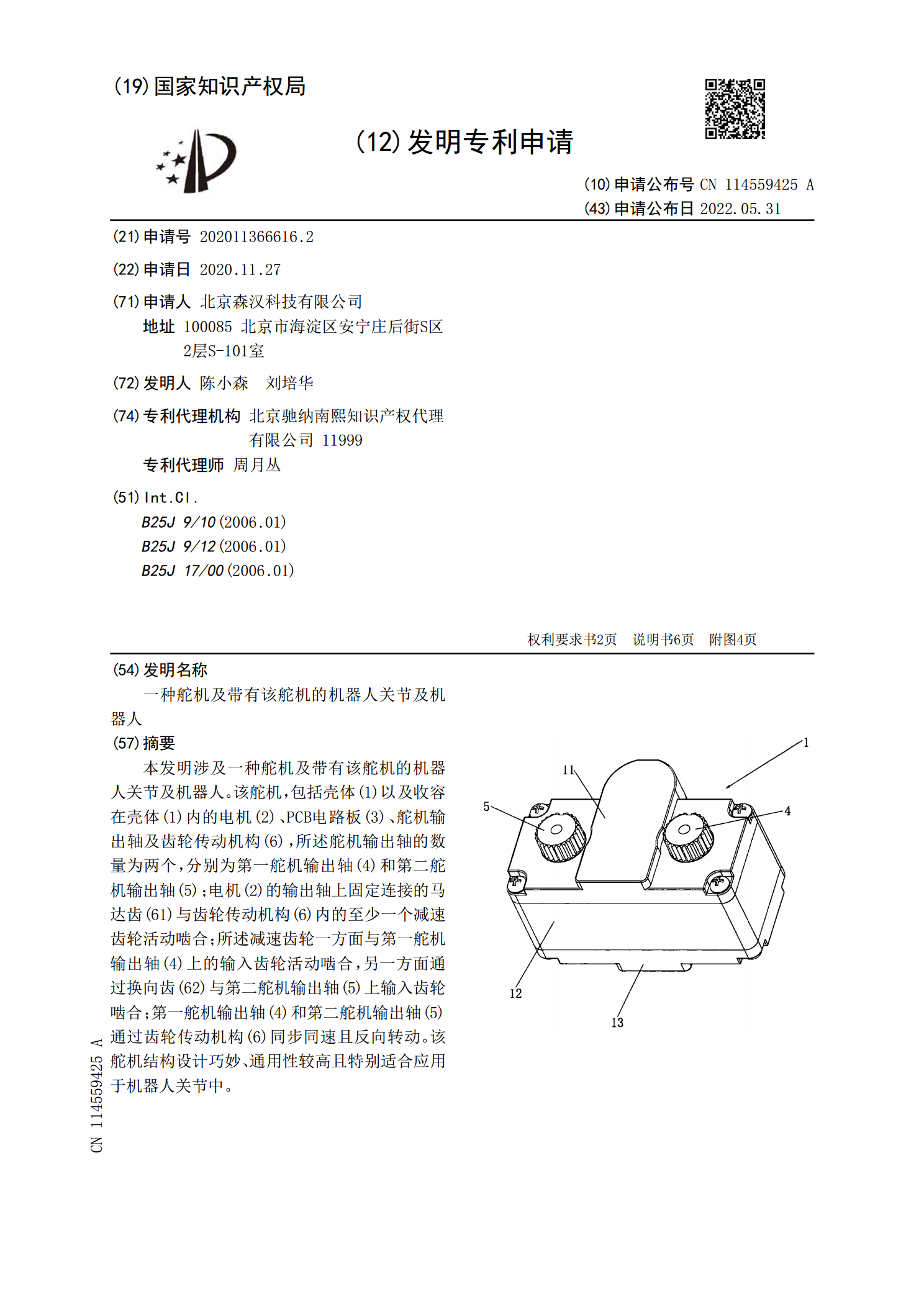
本发明涉及一种舵机及带有该舵机的机器人关节及机器人。该舵机,包括壳体(1)以及收容在壳体(1)内的电机(2)、PCB电路板(3)、舵机输出轴及齿轮传动机构(6),所述舵机输出轴的数量为两个,分别为第一舵机输出轴(4)和第二舵机输出轴(5);电机(2)的输出轴上固定连接的马达齿(61)与齿轮传动机构(6)内的至少一个减速齿轮活动啮合;所述减速齿轮一方面与第一舵机输出轴(4)上的输入齿轮活动啮合,另一方面通过换向齿(62)与第二舵机输出轴(5)上输入齿轮啮合;第一舵机输出轴(4)和第二舵机输出轴(5)通过齿轮

一种舵机及带有该舵机的机器人关节及机器人.pdf
本发明涉及一种舵机及带有该舵机的机器人关节及机器人。该舵机包括收容在壳体内的电机、两个PCB电路板、舵机输出轴及齿轮减速机构。齿轮减速机构的数量为两组。舵机输出轴和电机的数量均为两个。任一电机主轴上的马达齿通过任一齿轮减速机构与任一舵机输出轴上的输入齿轮活动啮合,另一电机主轴上的马达齿通过另一齿轮减速机构与另一舵机输出轴上的输入齿轮活动啮合。任一电机通过任一齿轮减速机构带动任一个舵机输出轴转动,另一电机通过另一齿轮减速机构带动另一个舵机输出轴转动。该舵机的输出稳定性较高、通用性较强且具有两个舵机输出轴,两

一种具有六关节的手臂机器人.pdf
本发明提供一种具有六关节的手臂机器人,包括四轴组件,所述四轴组件关节手臂和用于控制关节手臂旋转工作的驱动机构一;所述关节手臂为可拆卸结构,其包括小臂连接体、肘部和小臂;所述驱动机构一包括相互连接的伺服电机一和减速机一,减速机一设置在肘部上;所述小臂连接体的一端与小臂可拆卸连接,另一端与肘部上的减速机一输出端可拆卸连接。本发明具有六关节的手臂机器人能胜任高强度重复性工作,并具有灵活性强和安装调整方便的特点。同时,该手臂机器人结构紧凑,并有利于齿轮部件的配合间隙调整。