
一种直动伸缩臂.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种直动伸缩臂.pdf
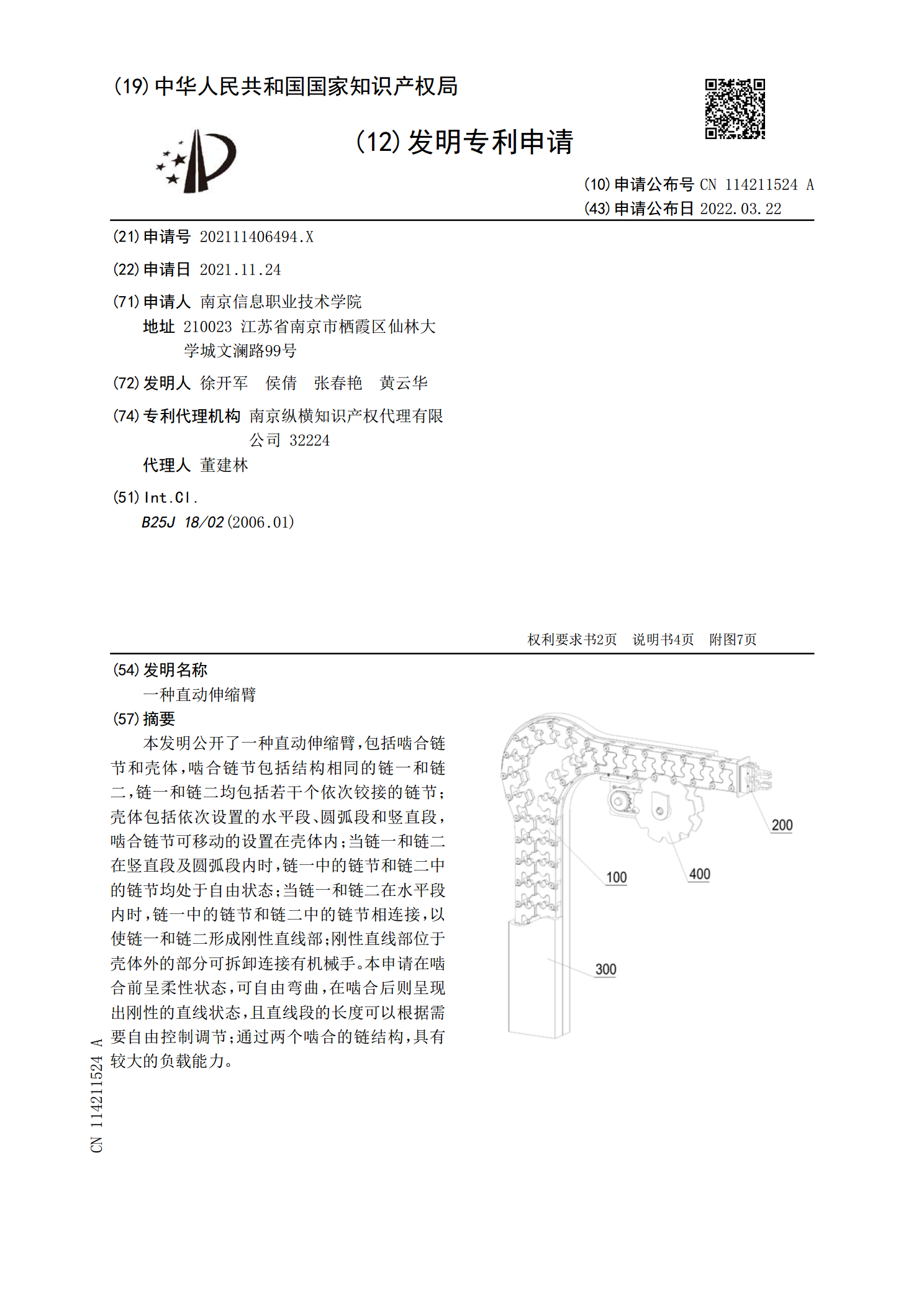
本发明公开了一种直动伸缩臂,包括啮合链节和壳体,啮合链节包括结构相同的链一和链二,链一和链二均包括若干个依次铰接的链节;壳体包括依次设置的水平段、圆弧段和竖直段,啮合链节可移动的设置在壳体内;当链一和链二在竖直段及圆弧段内时,链一中的链节和链二中的链节均处于自由状态;当链一和链二在水平段内时,链一中的链节和链二中的链节相连接,以使链一和链二形成刚性直线部;刚性直线部位于壳体外的部分可拆卸连接有机械手。本申请在啮合前呈柔性状态,可自由弯曲,在啮合后则呈现出刚性的直线状态,且直线段的长度可以根据需要自由控制调
直动伸缩机构及机械臂机构.pdf
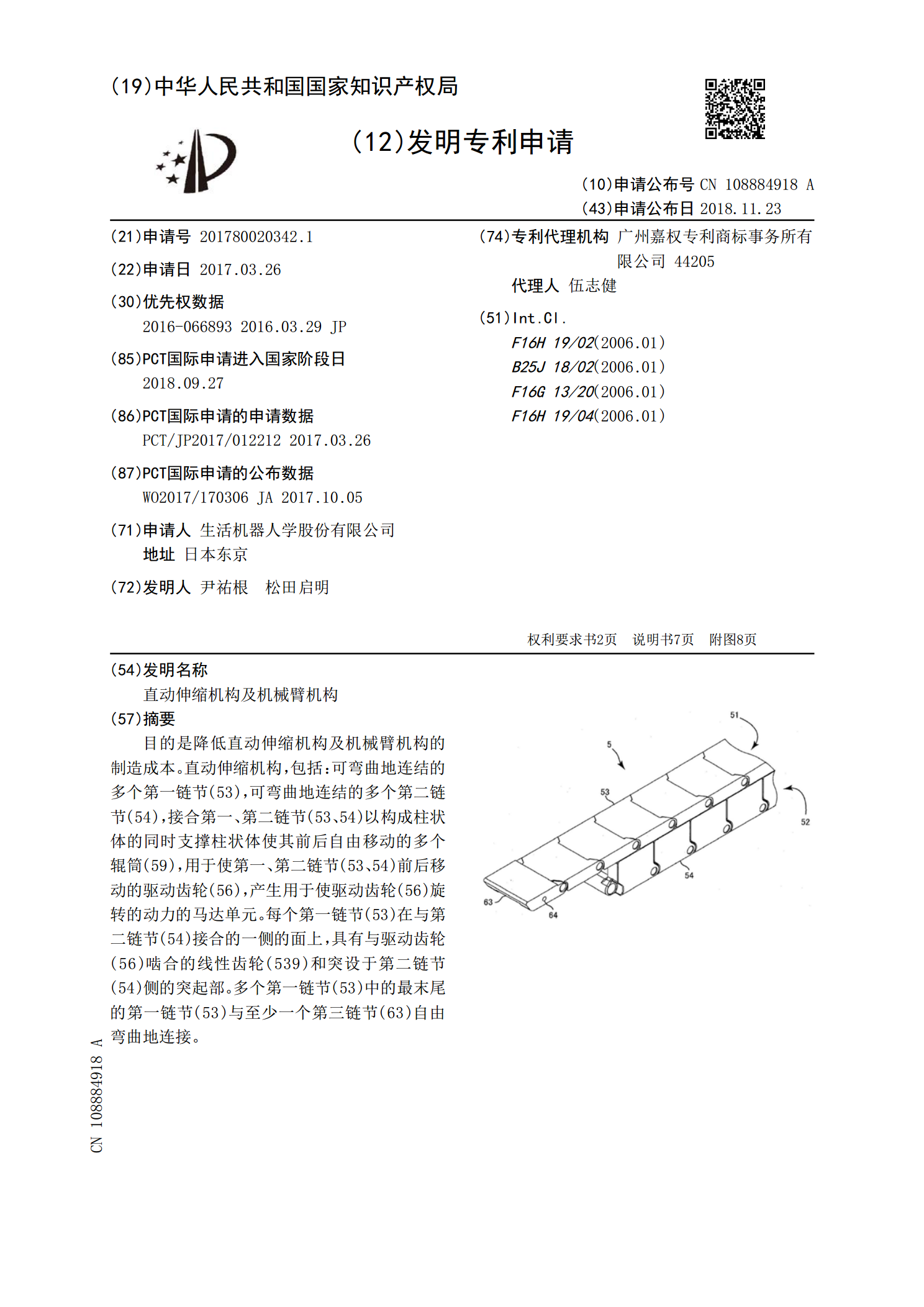
目的是降低直动伸缩机构及机械臂机构的制造成本。直动伸缩机构,包括:可弯曲地连结的多个第一链节(53),可弯曲地连结的多个第二链节(54),接合第一、第二链节(53、54)以构成柱状体的同时支撑柱状体使其前后自由移动的多个辊筒(59),用于使第一、第二链节(53、54)前后移动的驱动齿轮(56),产生用于使驱动齿轮(56)旋转的动力的马达单元。每个第一链节(53)在与第二链节(54)接合的一侧的面上,具有与驱动齿轮(56)啮合的线性齿轮(539)和突设于第二链节(54)侧的突起部。多个第一链节(53)中的最
直动伸缩机构及机械臂机构.pdf
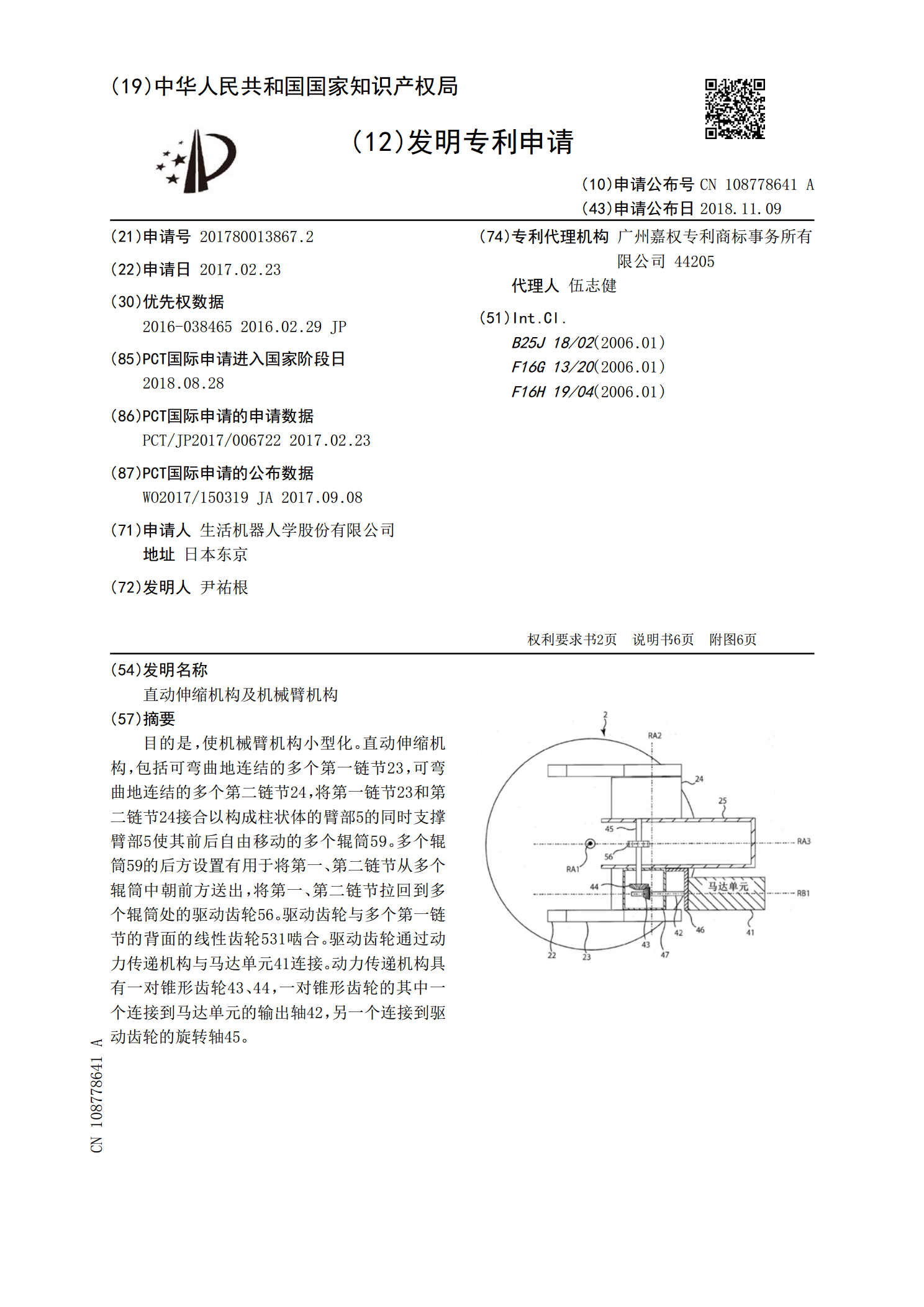
目的是,使机械臂机构小型化。直动伸缩机构,包括可弯曲地连结的多个第一链节23,可弯曲地连结的多个第二链节24,将第一链节23和第二链节24接合以构成柱状体的臂部5的同时支撑臂部5使其前后自由移动的多个辊筒59。多个辊筒59的后方设置有用于将第一、第二链节从多个辊筒中朝前方送出,将第一、第二链节拉回到多个辊筒处的驱动齿轮56。驱动齿轮与多个第一链节的背面的线性齿轮531啮合。驱动齿轮通过动力传递机构与马达单元41连接。动力传递机构具有一对锥形齿轮43、44,一对锥形齿轮的其中一个连接到马达单元的输出轴42,
机械臂机构及直动伸缩机构.pdf
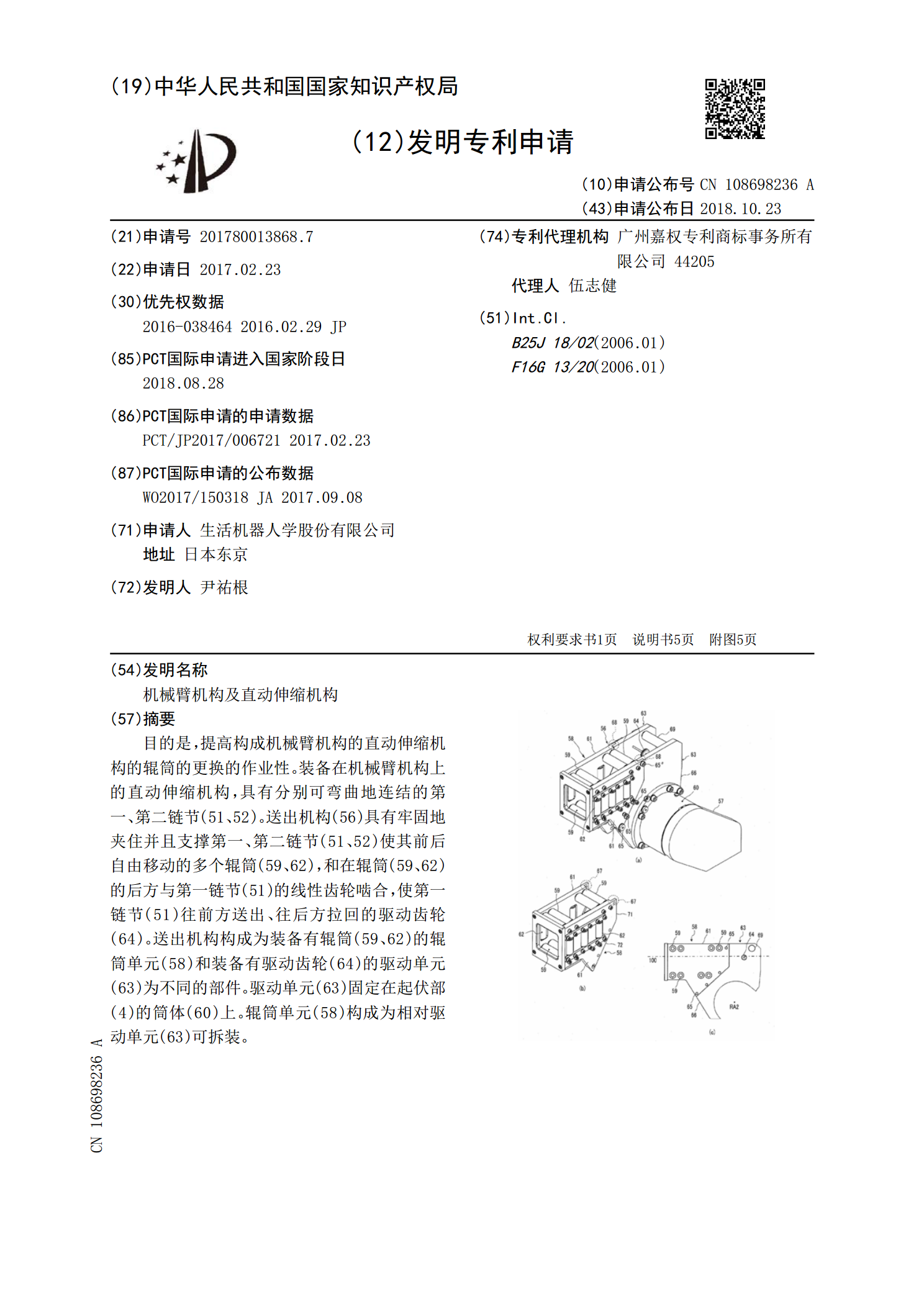
目的是,提高构成机械臂机构的直动伸缩机构的辊筒的更换的作业性。装备在机械臂机构上的直动伸缩机构,具有分别可弯曲地连结的第一、第二链节(51、52)。送出机构(56)具有牢固地夹住并且支撑第一、第二链节(51、52)使其前后自由移动的多个辊筒(59、62),和在辊筒(59、62)的后方与第一链节(51)的线性齿轮啮合,使第一链节(51)往前方送出、往后方拉回的驱动齿轮(64)。送出机构构成为装备有辊筒(59、62)的辊筒单元(58)和装备有驱动齿轮(64)的驱动单元(63)为不同的部件。驱动单元(63)固定

机械臂机构及直动伸缩机构.pdf
本发明是提高直动伸缩机构的移动特性。机械臂机构具有旋转关节部和直动伸缩关节部。直动伸缩关节部具有多个第一连结链节(23)和多个第二连结链节(22),所述多个第一连结链节(23)在底板侧具有可弯曲地连结的剖面“コ”字形,所述多个第二连结链节(22)具有可弯曲地连结的平板形状。多个第二连结链节中的前端的第二连结链节与多个第一连结链节中的前端的第一连结链节连接。通过第一、第二连结链节的接合,弯曲被限制,构成柱状体。通过第一、第二连结链节的分离,柱状体被解除。射出部(32)将第一、第二连结链节接合而构够成柱状体,