
清扫机器人及清扫系统.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

清扫机器人及清扫系统.pdf
本发明公开了一种清扫机器人及清扫系统,该清扫机器人包括一第一感测单元、一信号产生单元、一控制单元、多个滚轮以及一第二感测单元。第一感测单元根据一外部无线信号,产生一第一感测信号予一传输线。第二感测单元根据一外部环境,产生一第二感测信号。当第一感测单元未侦测到外部无线信号时,信号产生单元令传输线的状态符合预设状态。因此,控制单元产生一移动信号。滚轮根据移动信号而转动。当第一感测单元侦测到外部无线信号时,传输线的状态不符合一预设状态。因此,控制单元根据第二感测信号,调整移动信号。
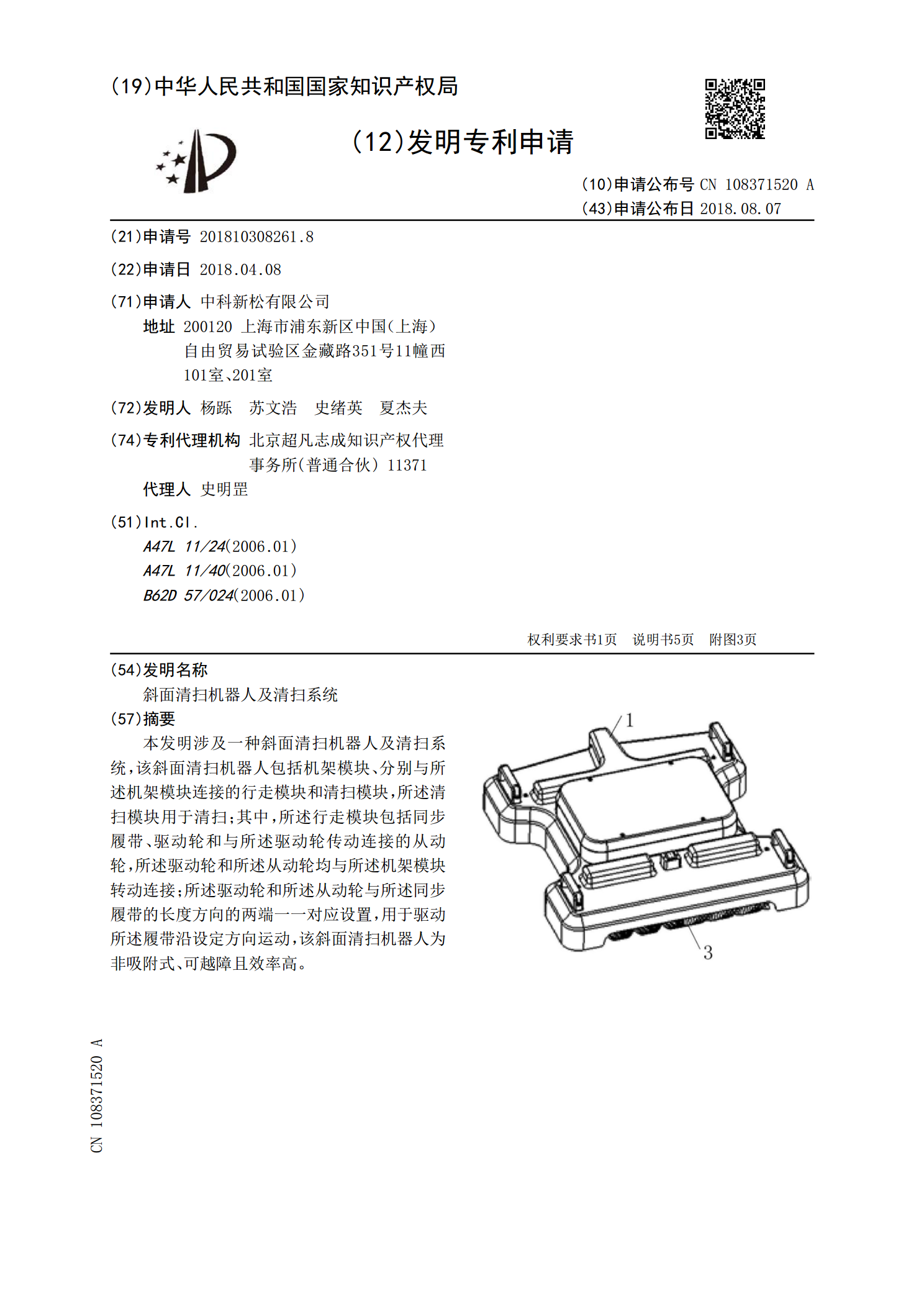
斜面清扫机器人及清扫系统.pdf
本发明涉及一种斜面清扫机器人及清扫系统,该斜面清扫机器人包括机架模块、分别与所述机架模块连接的行走模块和清扫模块,所述清扫模块用于清扫;其中,所述行走模块包括同步履带、驱动轮和与所述驱动轮传动连接的从动轮,所述驱动轮和所述从动轮均与所述机架模块转动连接;所述驱动轮和所述从动轮与所述同步履带的长度方向的两端一一对应设置,用于驱动所述履带沿设定方向运动,该斜面清扫机器人为非吸附式、可越障且效率高。
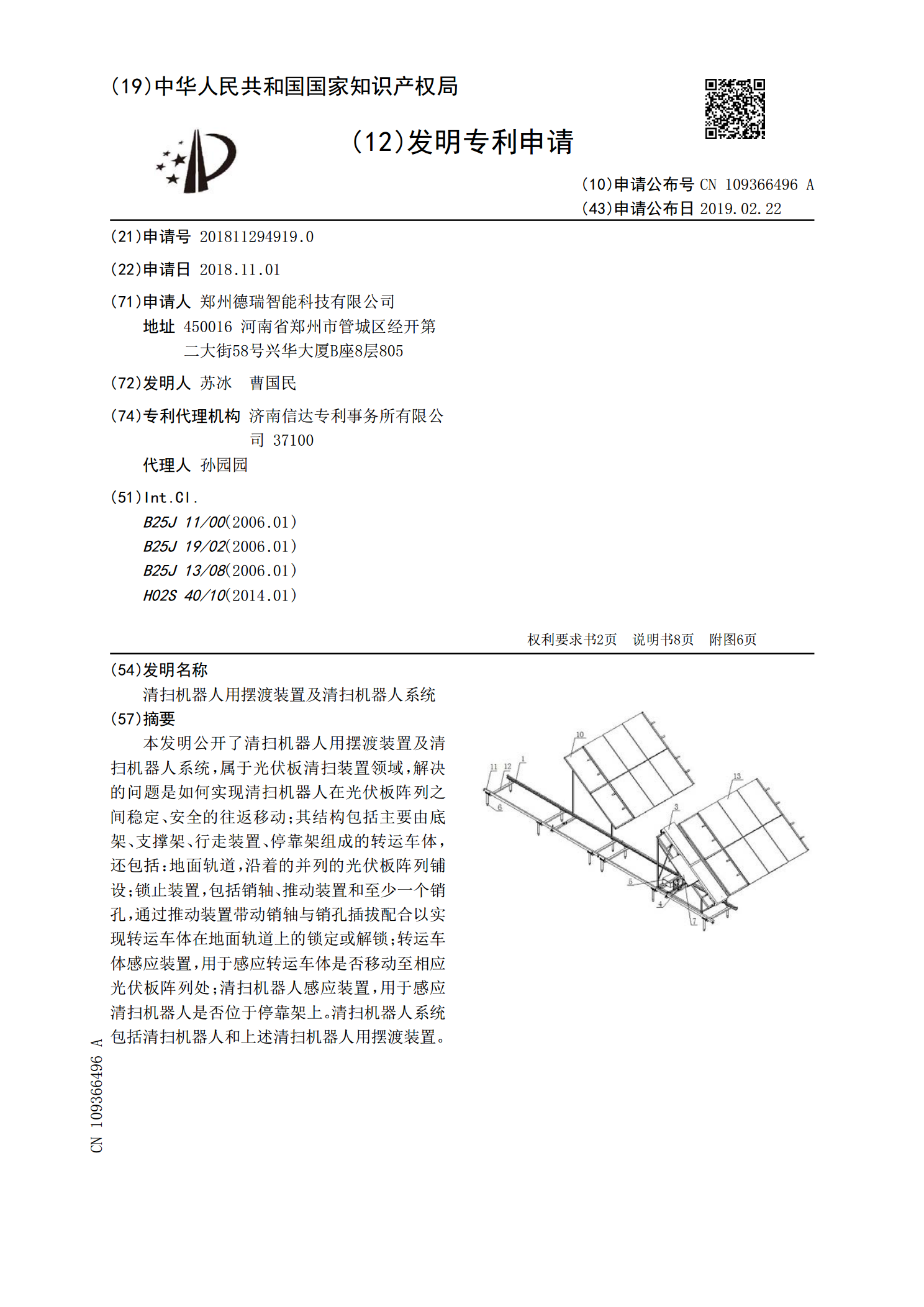
清扫机器人用摆渡装置及清扫机器人系统.pdf
本发明公开了清扫机器人用摆渡装置及清扫机器人系统,属于光伏板清扫装置领域,解决的问题是如何实现清扫机器人在光伏板阵列之间稳定、安全的往返移动;其结构包括主要由底架、支撑架、行走装置、停靠架组成的转运车体,还包括:地面轨道,沿着的并列的光伏板阵列铺设;锁止装置,包括销轴、推动装置和至少一个销孔,通过推动装置带动销轴与销孔插拔配合以实现转运车体在地面轨道上的锁定或解锁;转运车体感应装置,用于感应转运车体是否移动至相应光伏板阵列处;清扫机器人感应装置,用于感应清扫机器人是否位于停靠架上。清扫机器人系统包括清扫机

公共清扫机器人系统.pdf
一种公共清扫机器人系统,包括:多个界线电子桩和公共清扫机器人,所述公共清扫机器人包括:行走单元、清洁单元、驱动单元、控制单元、供电电池、防盗装置和报警装置,所述供电电池设置在公共清扫机器人的内部,行走单元和清洁单元分别设置在公共清扫机器人的底部,所述控制单元分别与清洁单元、驱动单元连接,在所述控制单元的作用下,驱动单元控制行走单元行走,所述供电电池提供电能给公共清扫机器人,所述防盗装置和报警装置设置在所述公共清扫机器人上;防盗装置包括:信号接收装置和防破坏标签,所述控制单元实时通过信号接收装置接收多个所述
清扫机器人清扫系统的设计与研究.pptx
汇报人:/目录0102清扫机器人的定义与功能清扫系统的构成与作用清扫机器人清扫系统的研究意义03清扫路径规划吸尘系统设计拖地系统设计智能控制系统设计04实验研究法模拟仿真法数据分析法对比分析法05在家庭环境中的应用在公共场所中的应用在特殊环境中的应用实践案例分析06清扫性能评价能耗评价噪音评价优化方案探讨07研究结论总结未来研究方向展望汇报人: