
水下清洁机器人节能清扫结构及其清扫方法.pdf

论文****轩吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水下清洁机器人节能清扫结构及其清扫方法.pdf
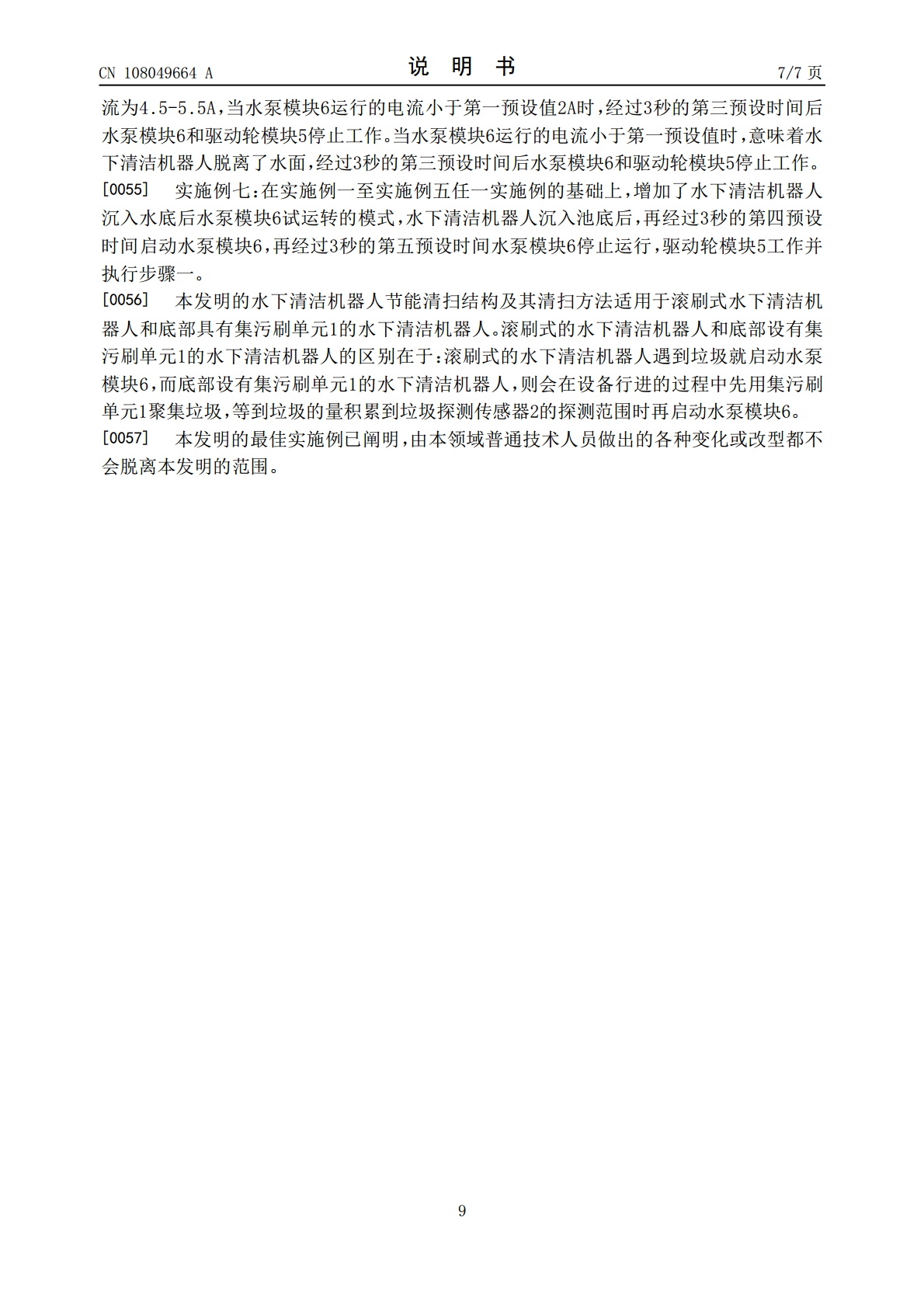
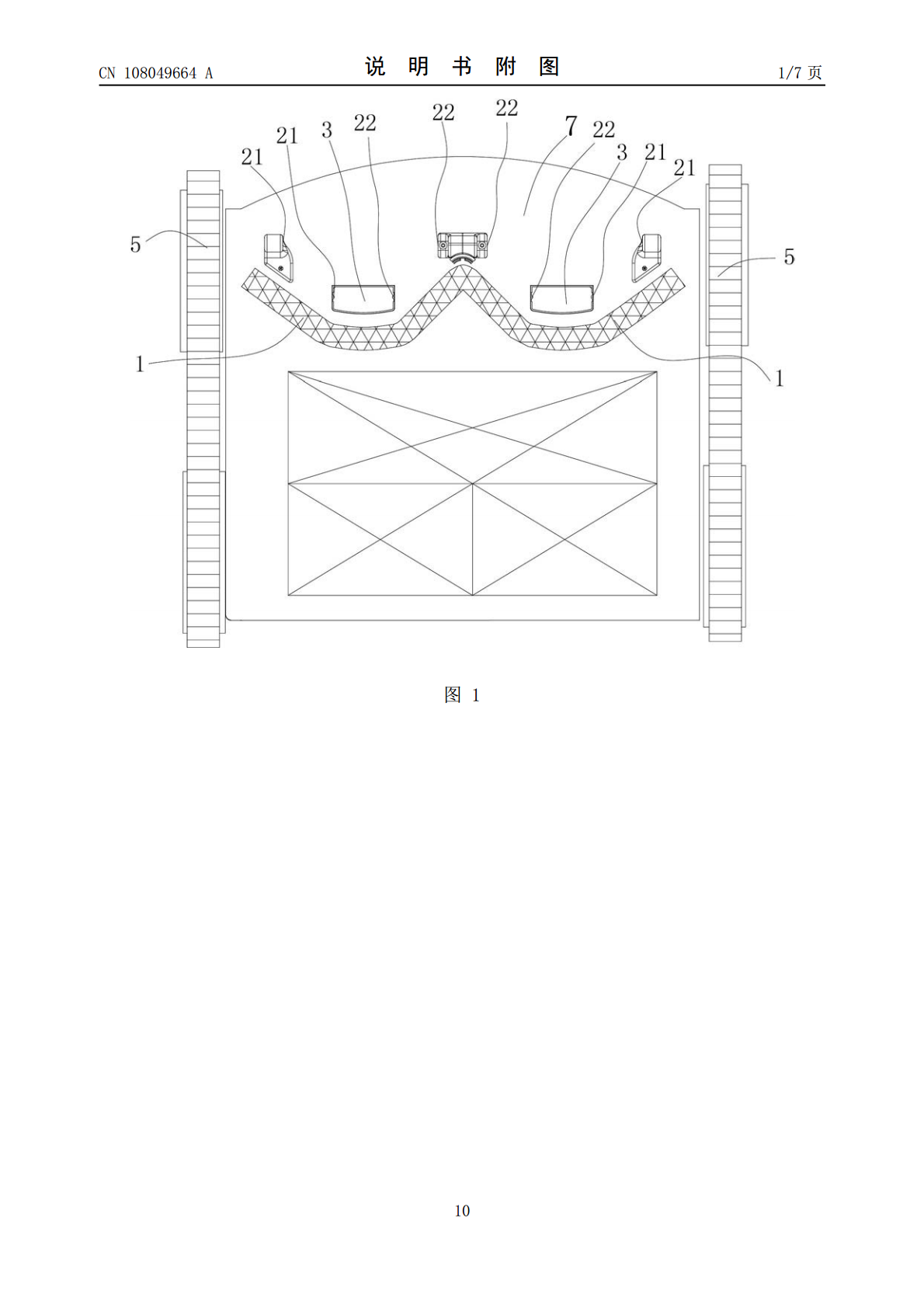
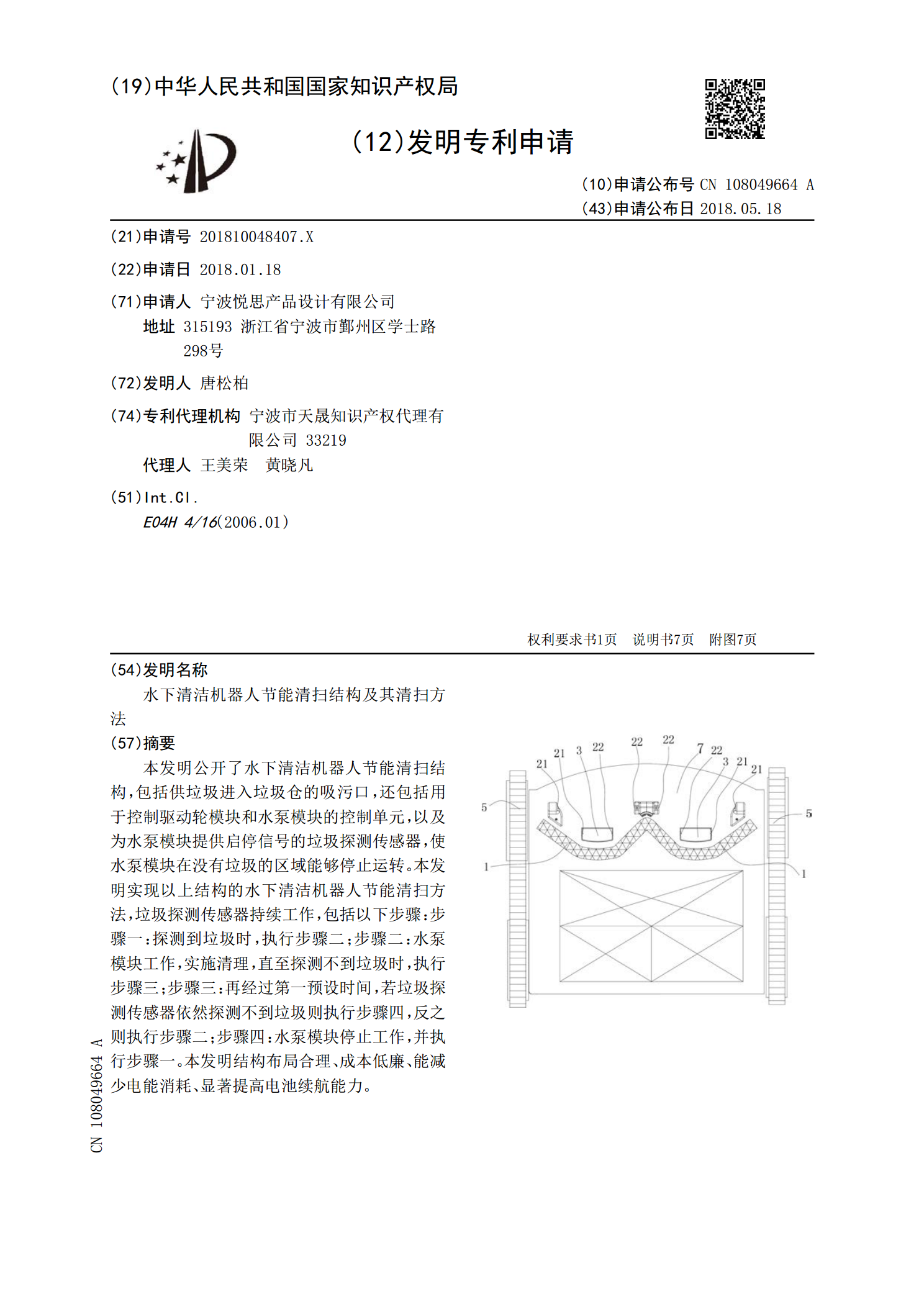
本发明公开了水下清洁机器人节能清扫结构,包括供垃圾进入垃圾仓的吸污口,还包括用于控制驱动轮模块和水泵模块的控制单元,以及为水泵模块提供启停信号的垃圾探测传感器,使水泵模块在没有垃圾的区域能够停止运转。本发明实现以上结构的水下清洁机器人节能清扫方法,垃圾探测传感器持续工作,包括以下步骤:步骤一:探测到垃圾时,执行步骤二;步骤二:水泵模块工作,实施清理,直至探测不到垃圾时,执行步骤三;步骤三:再经过第一预设时间,若垃圾探测传感器依然探测不到垃圾则执行步骤四,反之则执行步骤二;步骤四:水泵模块停止工作,并执行步
清洁机器人及其清扫方法.pdf
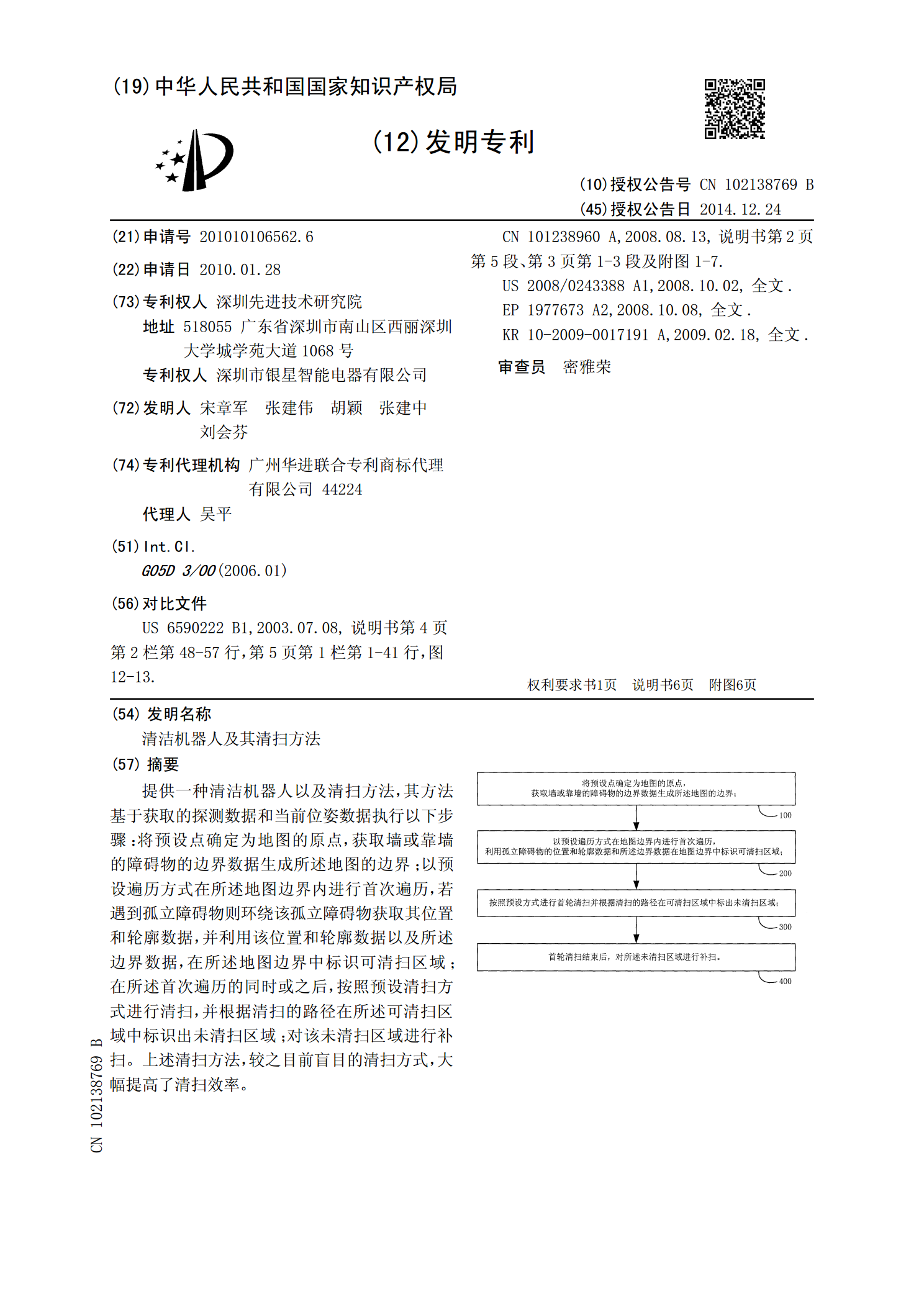
提供一种清洁机器人以及清扫方法,其方法基于获取的探测数据和当前位姿数据执行以下步骤:将预设点确定为地图的原点,获取墙或靠墙的障碍物的边界数据生成所述地图的边界;以预设遍历方式在所述地图边界内进行首次遍历,若遇到孤立障碍物则环绕该孤立障碍物获取其位置和轮廓数据,并利用该位置和轮廓数据以及所述边界数据,在所述地图边界中标识可清扫区域;在所述首次遍历的同时或之后,按照预设清扫方式进行清扫,并根据清扫的路径在所述可清扫区域中标识出未清扫区域;对该未清扫区域进行补扫。上述清扫方法,较之目前盲目的清扫方式,大幅提高了

建筑物外立面机器人清扫系统及其清扫方法.pdf
本发明公开了一种建筑物外立面机器人清扫系统,本发明还公开了一种使用该机器人清扫系统的清扫方法,在安装支架上悬挂作业缆绳,作业缆绳底端连接在卷扬机上,在所述作业缆绳上设有清扫机器人,清扫机器人上转动连接有具有卷持轮及其驱动装置,作业缆绳穿入清扫机器人并且绕卷持轮一圈或一圈以上,所述清扫机器人一表面上固定设有三根或三根以上的伸缩支撑臂,在具有伸缩支撑臂的清扫机器人表面上还转动连接有清扫臂及其转动驱动装置,清扫壁顶端部固定连接清扫毛刷。本发明可彻底的将高空清扫工人从危险恶劣的环境解脱出来,提高了工作
一种高效节能扫地机及其清扫方法.pdf
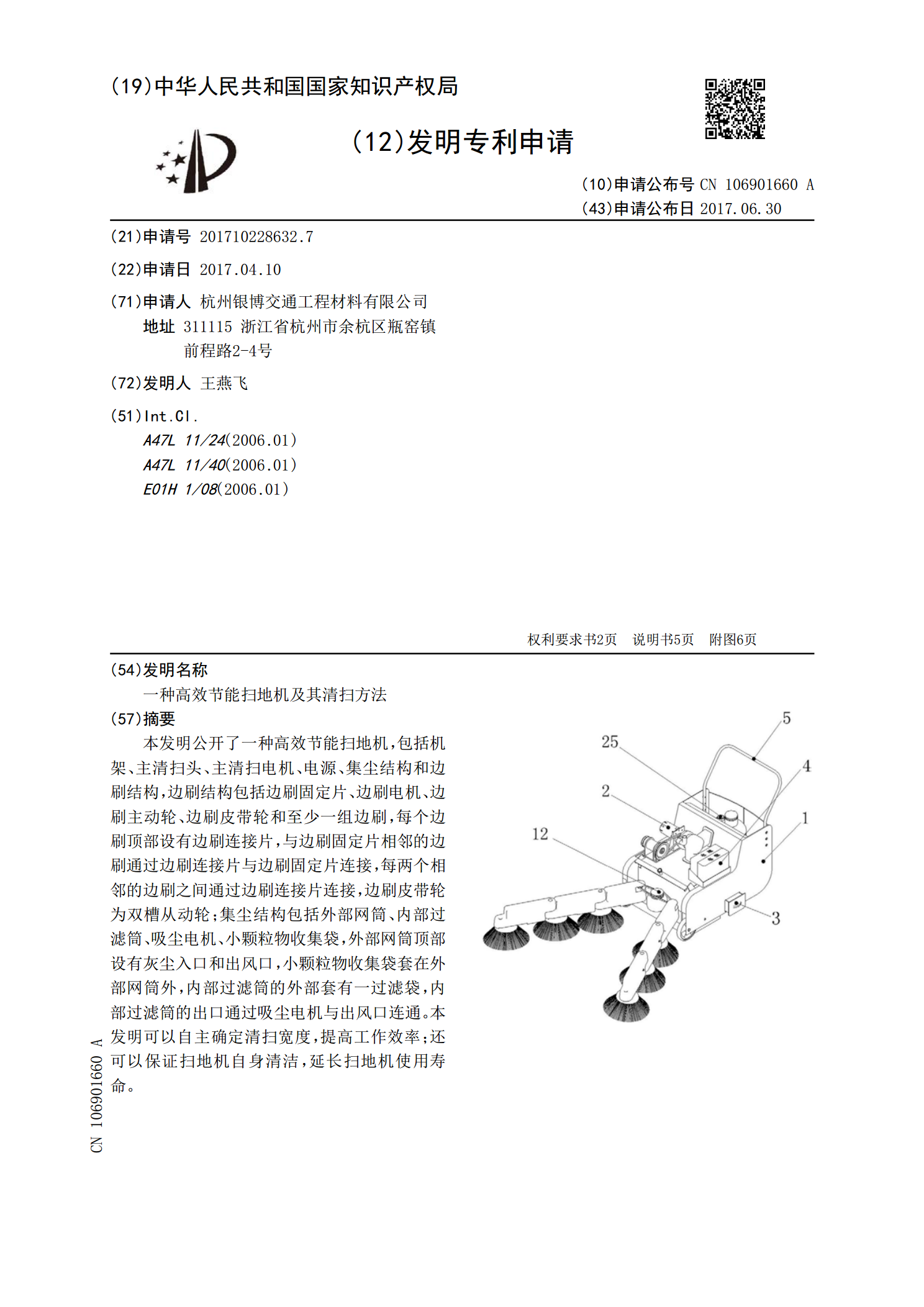
本发明公开了一种高效节能扫地机,包括机架、主清扫头、主清扫电机、电源、集尘结构和边刷结构,边刷结构包括边刷固定片、边刷电机、边刷主动轮、边刷皮带轮和至少一组边刷,每个边刷顶部设有边刷连接片,与边刷固定片相邻的边刷通过边刷连接片与边刷固定片连接,每两个相邻的边刷之间通过边刷连接片连接,边刷皮带轮为双槽从动轮;集尘结构包括外部网筒、内部过滤筒、吸尘电机、小颗粒物收集袋,外部网筒顶部设有灰尘入口和出风口,小颗粒物收集袋套在外部网筒外,内部过滤筒的外部套有一过滤袋,内部过滤筒的出口通过吸尘电机与出风口连通。本发明

清扫结构.pdf
本发明公开了一种清扫结构,在定位架中安装有动力轮,清扫棍,皮带轮,压紧轮,把手,凸出圈,转动轴,垃圾箱。有益效果:使用人员在使用中能够又快又好的把地面上的垃圾清扫进垃圾箱。