
轮式移动管道机器人.pdf

森林****来了


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮式移动管道机器人.pdf
本发明公开了一种轮式移动管道机器人,包括:爬行器,包括密闭的箱体(17)、主动齿轮系、轮组(10,19,16);可根据不同管道内径的需要固定安装在爬行器上的升降云台(2);两自由度探测头(1),其可根据需要直接插拔于升降云台或爬行器上,从而实现对管道的全方位检测,提高工作效率。轮组包括小轮组与大轮组。小轮组(10,19)的单侧小轮之一为主动轮。大轮组包括侧桥板、快连接结构、大轮(16)。箱体内设置有与主动齿轮系连接的电机。本发明通过快速简捷无螺钉装卸匹配的大轮组与升降云台,来调节爬行器检测的径向尺寸,能够

轮式管道检测机器人.pdf
本发明公开了轮式管道检测机器人,包括固定安装在轮式行走车体上的喷料座体以及固定安装在所述轮式行走车体上的支撑座体,所述喷料座体顶部端面内设有储料箱体,所述储料箱体顶部端面内设有储料腔,所述储料腔右侧壁连通设有L型喷料管,所述L型喷料管转动配合安装在所述喷料座体右侧端面内且末端安装有喷料机构,所述L型喷料管外周的所述喷料座体内设有空腔,所述空腔内的所述L型喷料管外周固设有从动齿轮,所述储料箱体内转动配合安装有搅拌主轴,所述搅拌主轴外周固设有多组搅料页片,所述储料纤体底端的所述喷料座体内设有传动滑腔,所述搅拌
轮式移动机器人.pdf
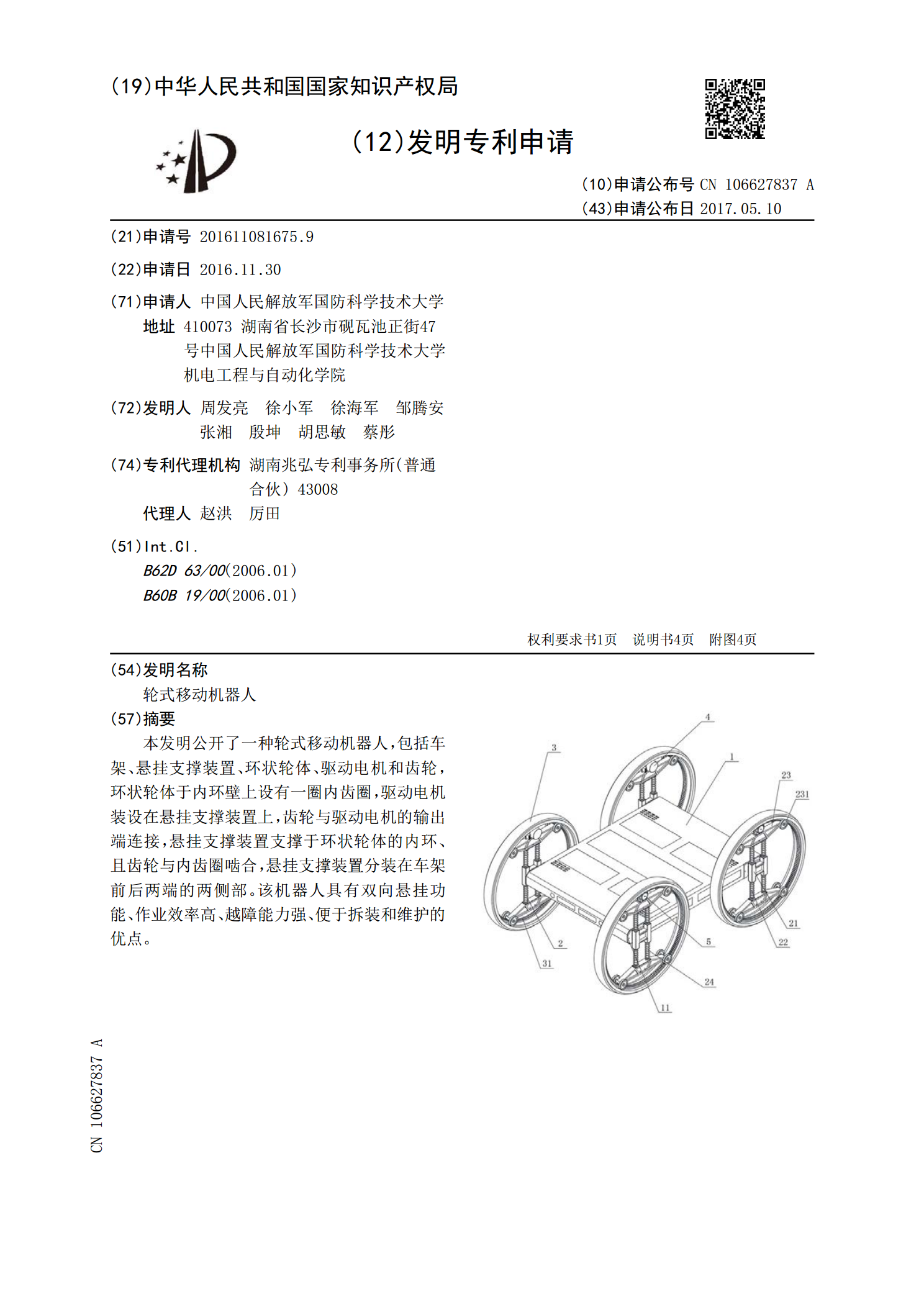
本发明公开了一种轮式移动机器人,包括车架、悬挂支撑装置、环状轮体、驱动电机和齿轮,环状轮体于内环壁上设有一圈内齿圈,驱动电机装设在悬挂支撑装置上,齿轮与驱动电机的输出端连接,悬挂支撑装置支撑于环状轮体的内环、且齿轮与内齿圈啮合,悬挂支撑装置分装在车架前后两端的两侧部。该机器人具有双向悬挂功能、作业效率高、越障能力强、便于拆装和维护的优点。

轮式移动机器人在圆形管道中的运动学建模与仿真分析.docx
轮式移动机器人在圆形管道中的运动学建模与仿真分析1.引言随着工业自动化和智能化的不断发展,移动机器人系统在工业和制造业中得到了广泛的应用。而轮式移动机器人作为一种主要的运动形式,已经在各个领域有了广泛的应用,如物流搬运、制造业、室内清洁、农业等领域。其中,在管道内的检测与清洗、维护和修复等方面,轮式移动机器人发挥了更为重要的作用。因为管道内往往是狭窄、曲折且复杂的环境,而轮式移动机器人因其结构简单、便于控制和灵活性高等特点能够有效的解决这一问题。本文将针对轮式移动机器人在圆形管道中的运动学建模与仿真分析展
轮式智能自主移动服务机器人.pdf
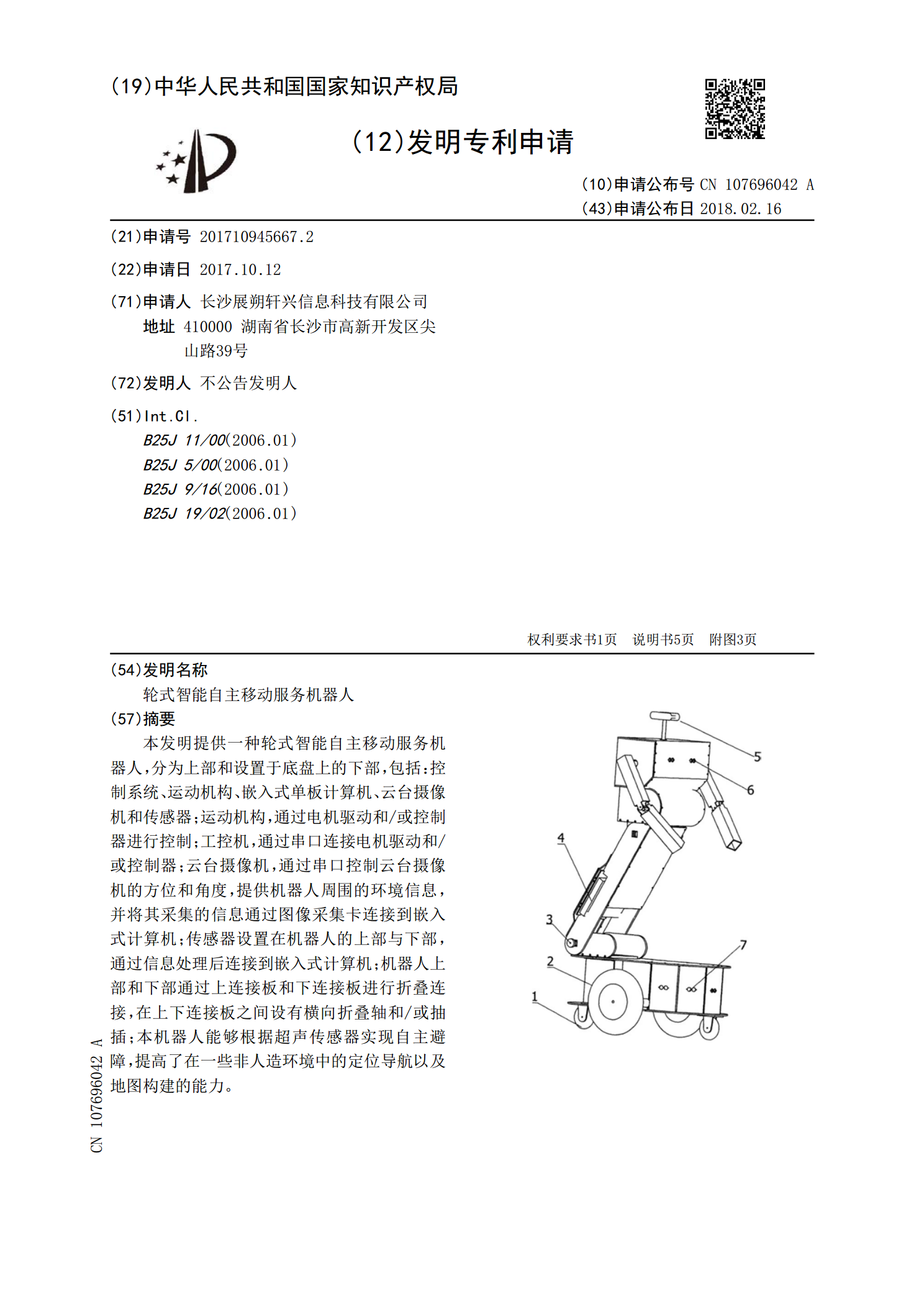
本发明提供一种轮式智能自主移动服务机器人,分为上部和设置于底盘上的下部,包括:控制系统、运动机构、嵌入式单板计算机、云台摄像机和传感器;运动机构,通过电机驱动和/或控制器进行控制;工控机,通过串口连接电机驱动和/或控制器;云台摄像机,通过串口控制云台摄像机的方位和角度,提供机器人周围的环境信息,并将其采集的信息通过图像采集卡连接到嵌入式计算机;传感器设置在机器人的上部与下部,通过信息处理后连接到嵌入式计算机;机器人上部和下部通过上连接板和下连接板进行折叠连接,在上下连接板之间设有横向折叠轴和/或抽插;本机