
轮式智能自主移动服务机器人.pdf

St****36

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮式智能自主移动服务机器人.pdf
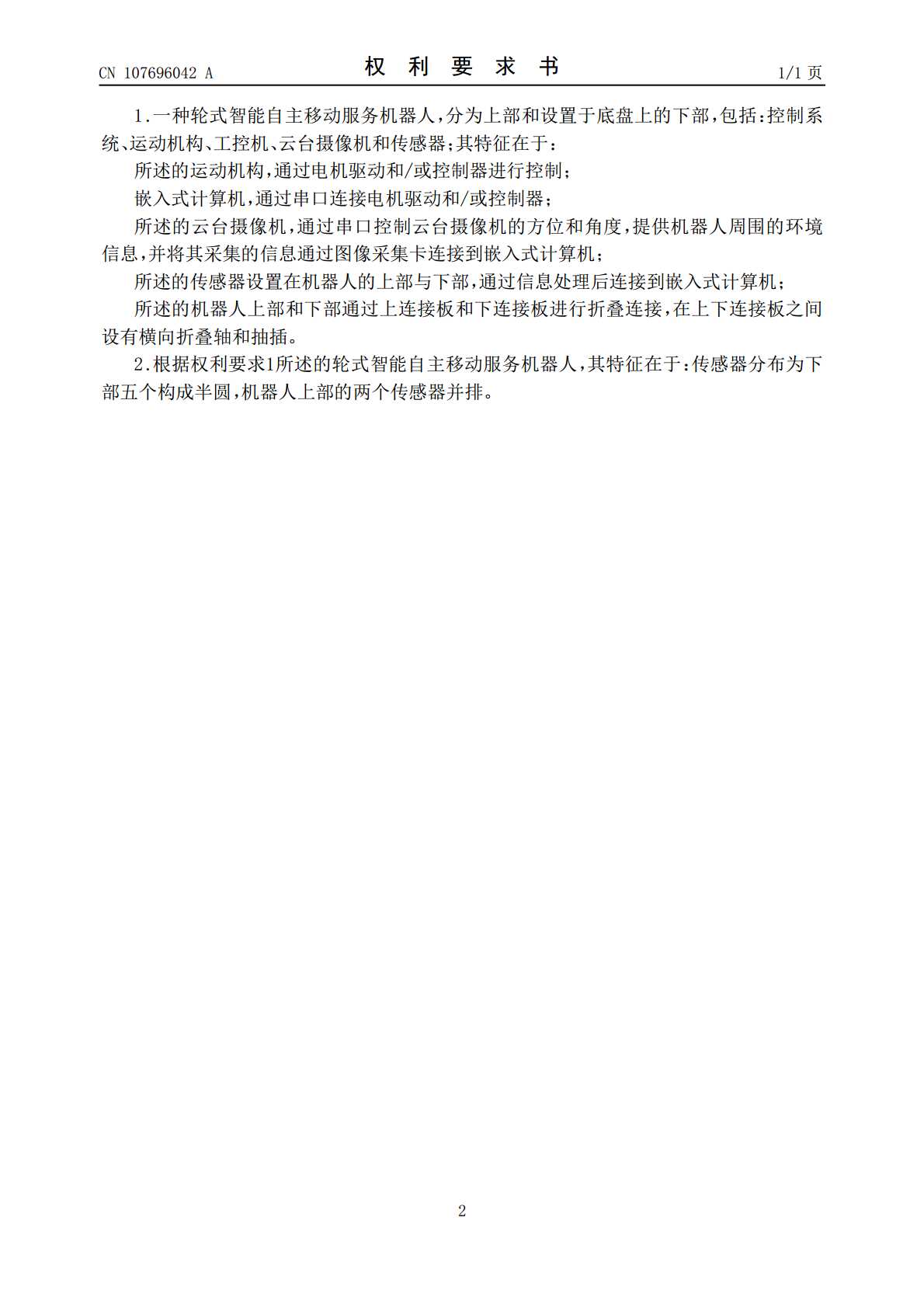
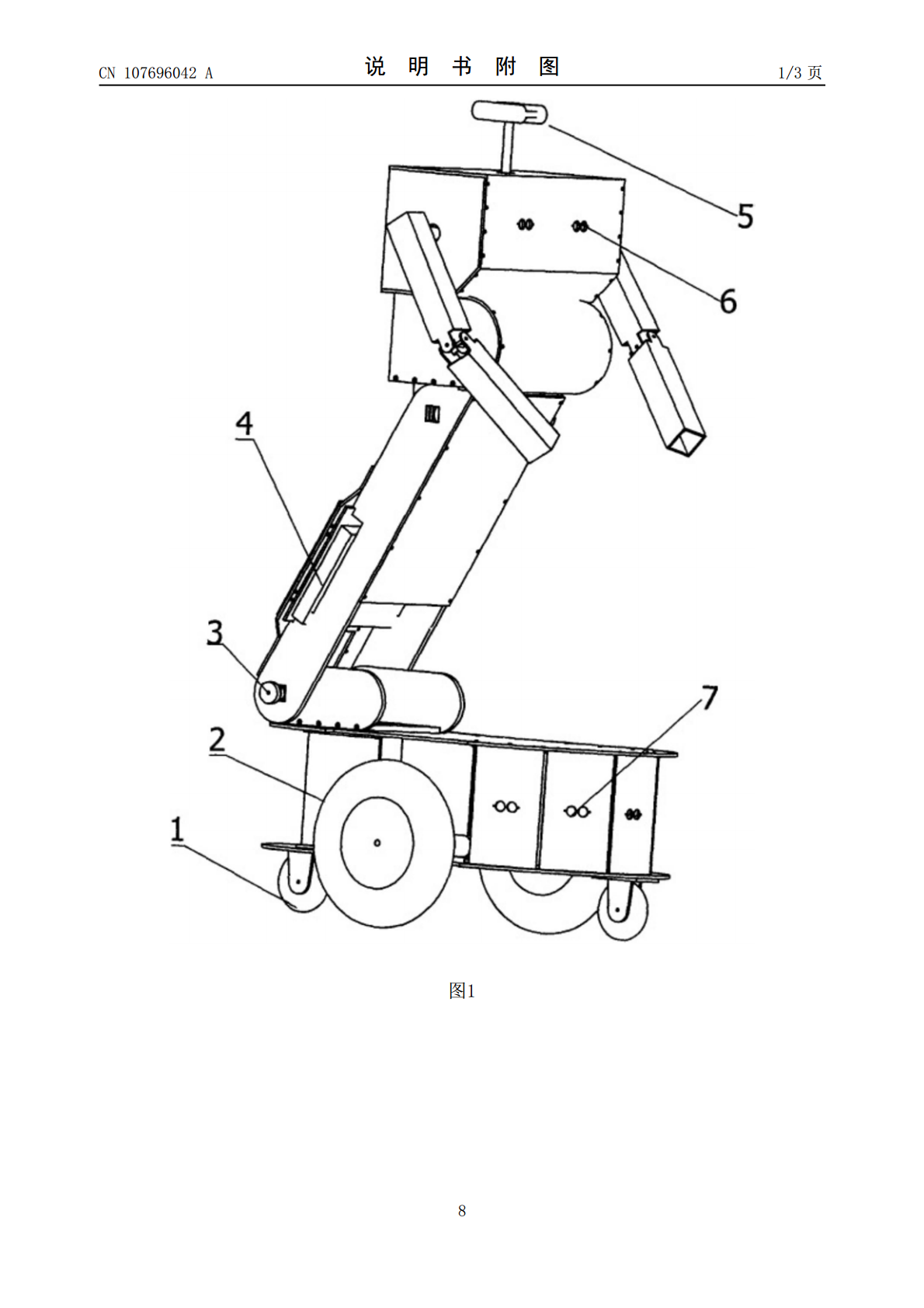
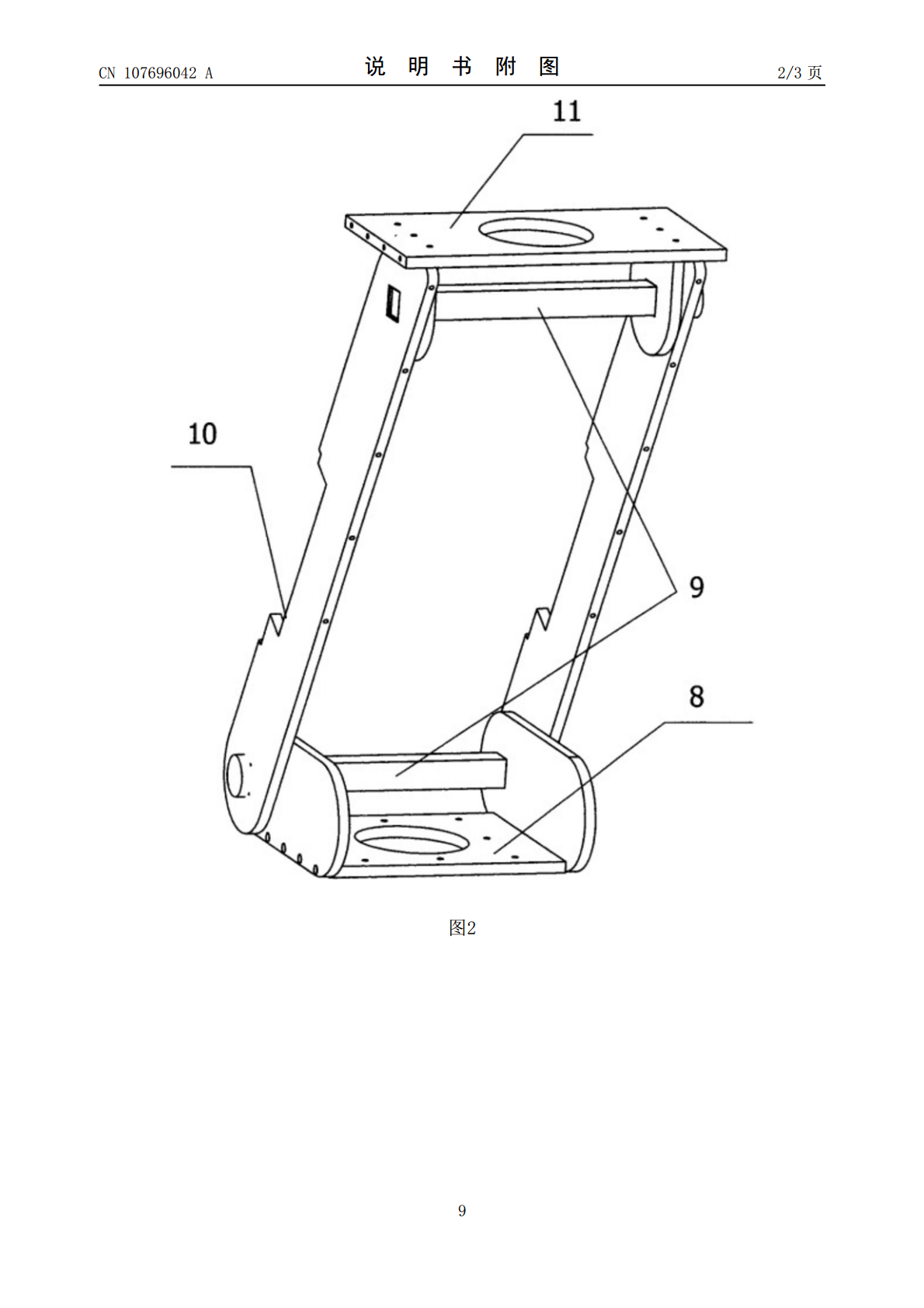
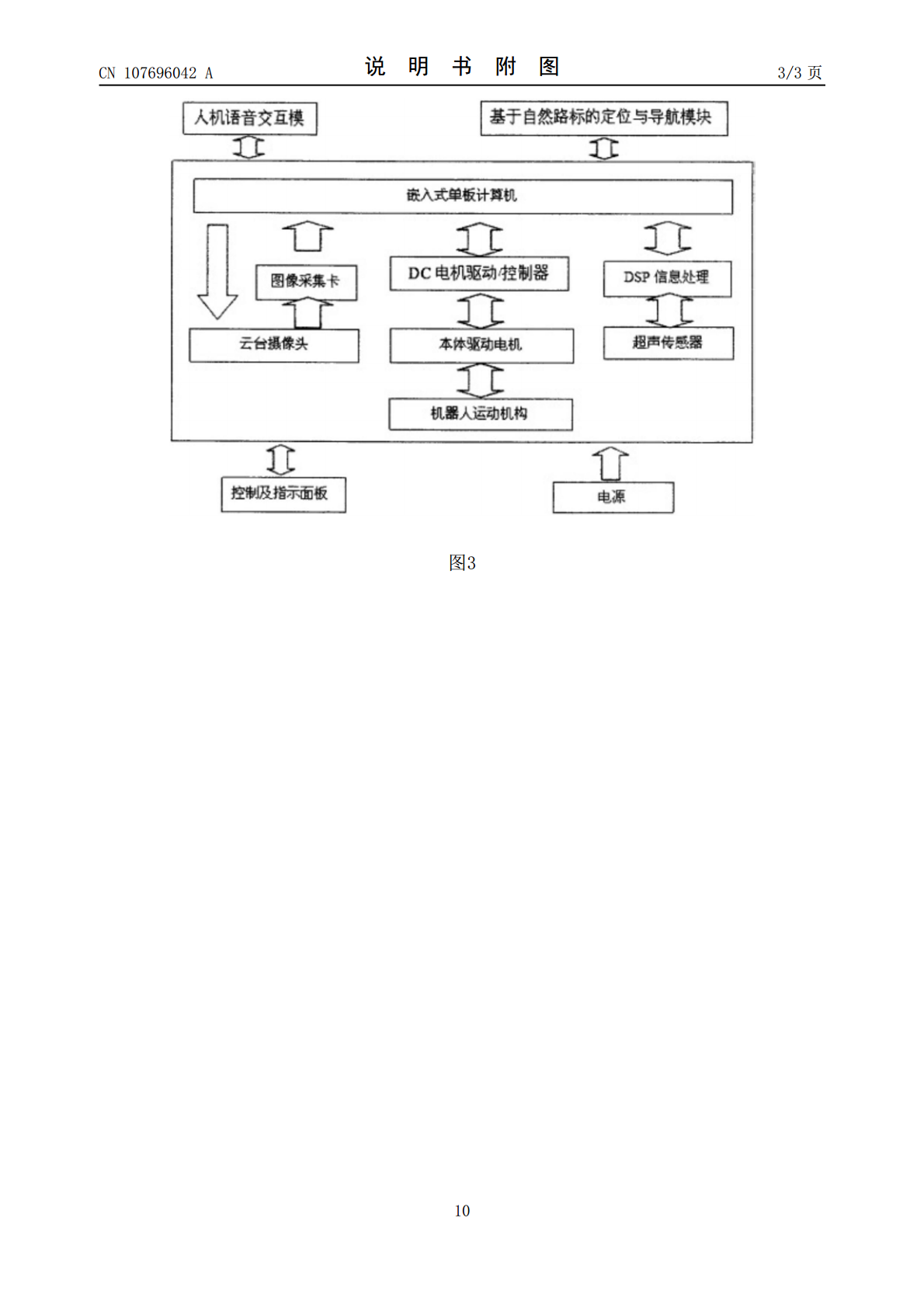
本发明提供一种轮式智能自主移动服务机器人,分为上部和设置于底盘上的下部,包括:控制系统、运动机构、嵌入式单板计算机、云台摄像机和传感器;运动机构,通过电机驱动和/或控制器进行控制;工控机,通过串口连接电机驱动和/或控制器;云台摄像机,通过串口控制云台摄像机的方位和角度,提供机器人周围的环境信息,并将其采集的信息通过图像采集卡连接到嵌入式计算机;传感器设置在机器人的上部与下部,通过信息处理后连接到嵌入式计算机;机器人上部和下部通过上连接板和下连接板进行折叠连接,在上下连接板之间设有横向折叠轴和/或抽插;本机

轮式智能自主移动服务机器人.pdf
本发明一种轮式智能自主移动服务机器人,分为上部和设置于底盘上的下部,包括:控制系统、运动机构、嵌入式单板计算机、云台摄像机和传感器;运动机构,通过电机驱动和/或控制器进行控制;工控机,通过串口连接电机驱动和/或控制器;云台摄像机,通过串口控制云台摄像机的方位和角度,提供机器人周围的环境信息,并将其采集的信息通过图像采集卡连接到嵌入式计算机;传感器设置在机器人的上部与下部,通过信息处理后连接到嵌入式计算机;机器人上部和下部通过上连接板和下连接板进行折叠连接,在上下连接板之间设有横向折叠轴和/或抽插
一种轮式自主移动机器人.pdf
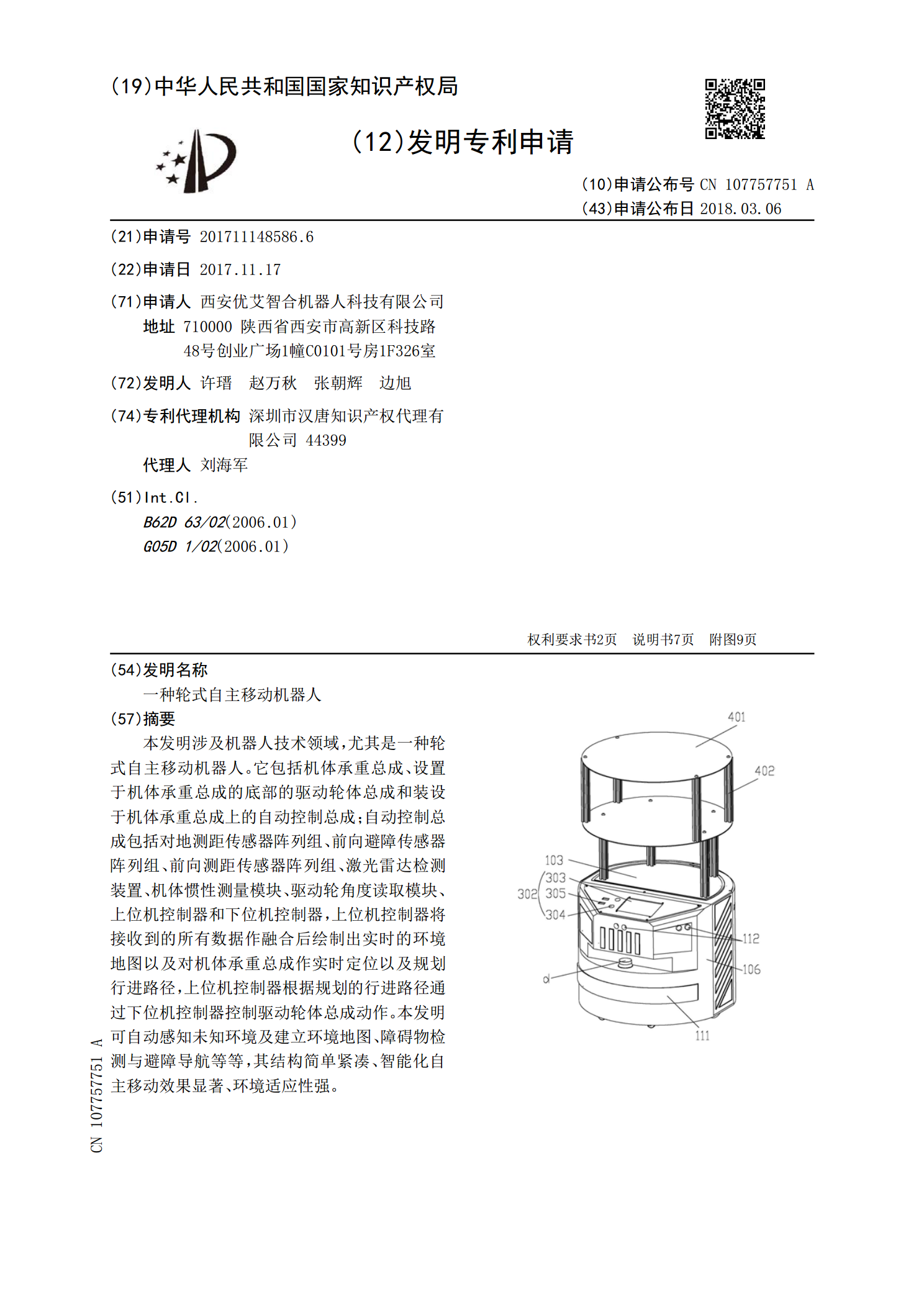
本发明涉及机器人技术领域,尤其是一种轮式自主移动机器人。它包括机体承重总成、设置于机体承重总成的底部的驱动轮体总成和装设于机体承重总成上的自动控制总成;自动控制总成包括对地测距传感器阵列组、前向避障传感器阵列组、前向测距传感器阵列组、激光雷达检测装置、机体惯性测量模块、驱动轮角度读取模块、上位机控制器和下位机控制器,上位机控制器将接收到的所有数据作融合后绘制出实时的环境地图以及对机体承重总成作实时定位以及规划行进路径,上位机控制器根据规划的行进路径通过下位机控制器控制驱动轮体总成动作。本发明可自动感知未知

一种轮式移动服务机器人.pdf
本发明的目的在于提供一种轮式移动服务机器人,包括底盘机构、机架、大臂机构、小臂机构、拉线电机组件,小臂机构连接大臂机构,大臂机构连接机架,拉线电机组件安装在机架里,机架固定在底盘机构上;所述的小臂机构包括手指、手指盒、钢丝绳、U型架、随动转盘、小臂蜗轮、小臂蜗杆、小臂外壳、小臂电机、腕外壳,手指安装在手指盒上,U型架安装在手指里,销钉安装在U型架上,钢丝绳一端固定在U型架里、另一端连接拉线电机组件,手指盒安装在随动转盘上,随动转盘在重力的作用下自动转动,随动转盘连接腕外壳,小臂电机、小臂蜗杆、小臂蜗轮安装

自主轮式移动操作机器人的系统设计与分析的中期报告.docx
自主轮式移动操作机器人的系统设计与分析的中期报告该报告主要涵盖以下内容:1.系统总体设计2.机器人底盘设计与实现3.自主控制系统设计与实现4.感知系统设计与实现5.路径规划与避障算法设计与实现6.系统测试与优化1.系统总体设计在该系统的总体设计中,我们采用了基于树莓派的单片机控制,实时操作机器人。整个系统组成包括一个底盘、两个轮子、两个电机、一个树莓派、多个传感器和其他必需的电子元件。机器人的底盘由3D打印技术制作。自主控制系统包括驱动电机的PWM模块、AD采集模块、功率电源模块等。2.机器人底盘设计与实