
用于控制两轮车辆中的牵引力的系统和方法.pdf

fa****楠吖

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制两轮车辆中的牵引力的系统和方法.pdf
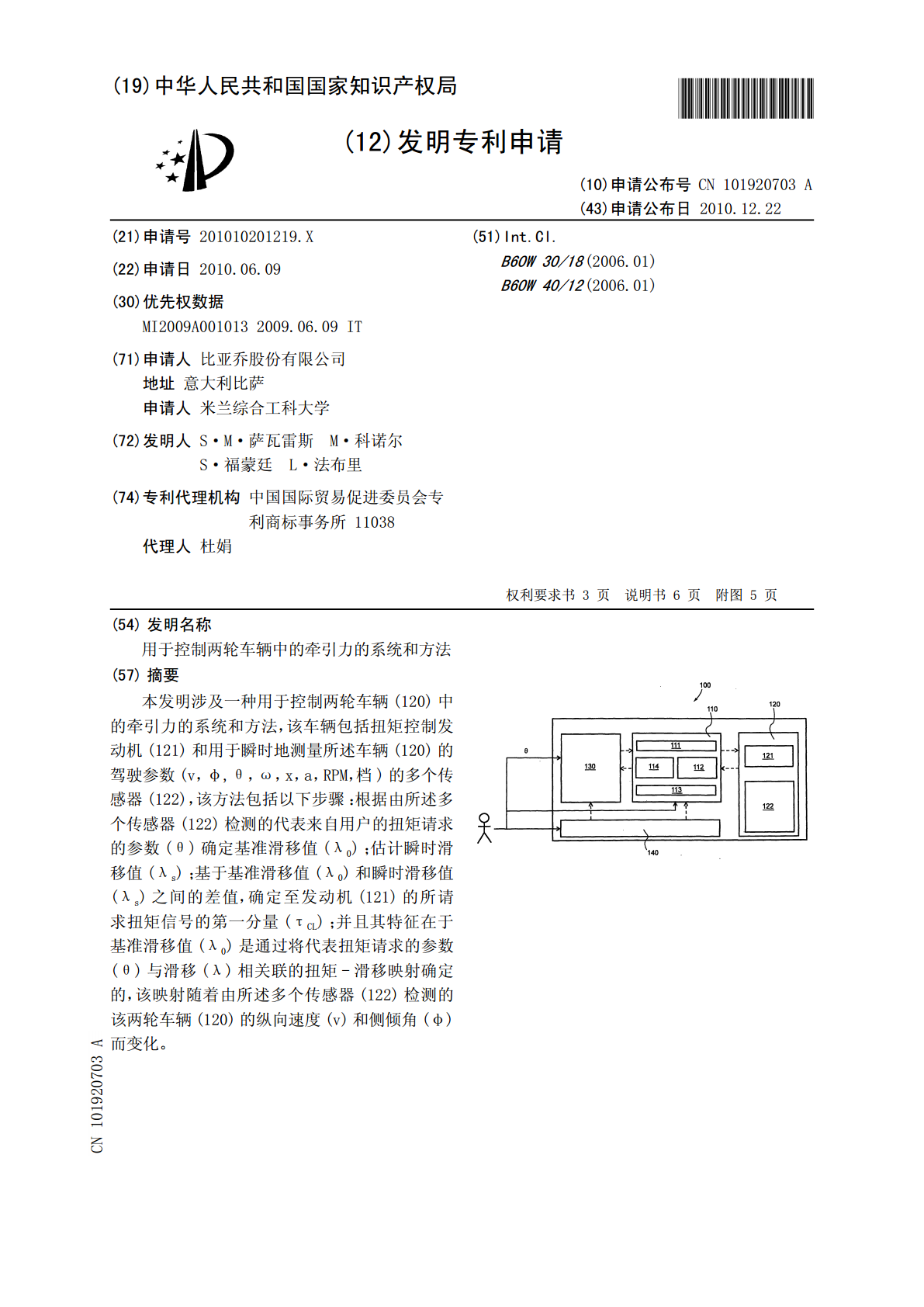
本发明涉及一种用于控制两轮车辆(120)中的牵引力的系统和方法,该车辆包括扭矩控制发动机(121)和用于瞬时地测量所述车辆(120)的驾驶参数(v,φ,θ,ω,x,a,RPM,档)的多个传感器(122),该方法包括以下步骤:根据由所述多个传感器(122)检测的代表来自用户的扭矩请求的参数(θ)确定基准滑移值(λ0);估计瞬时滑移值(λs);基于基准滑移值(λ0)和瞬时滑移值(λs)之间的差值,确定至发动机(121)的所请求扭矩信号的第一分量(τCL);并且其特征在于基准滑移值(λ0)是通过将代表扭矩请求的
用于控制车辆的牵引力的装置和方法.pdf
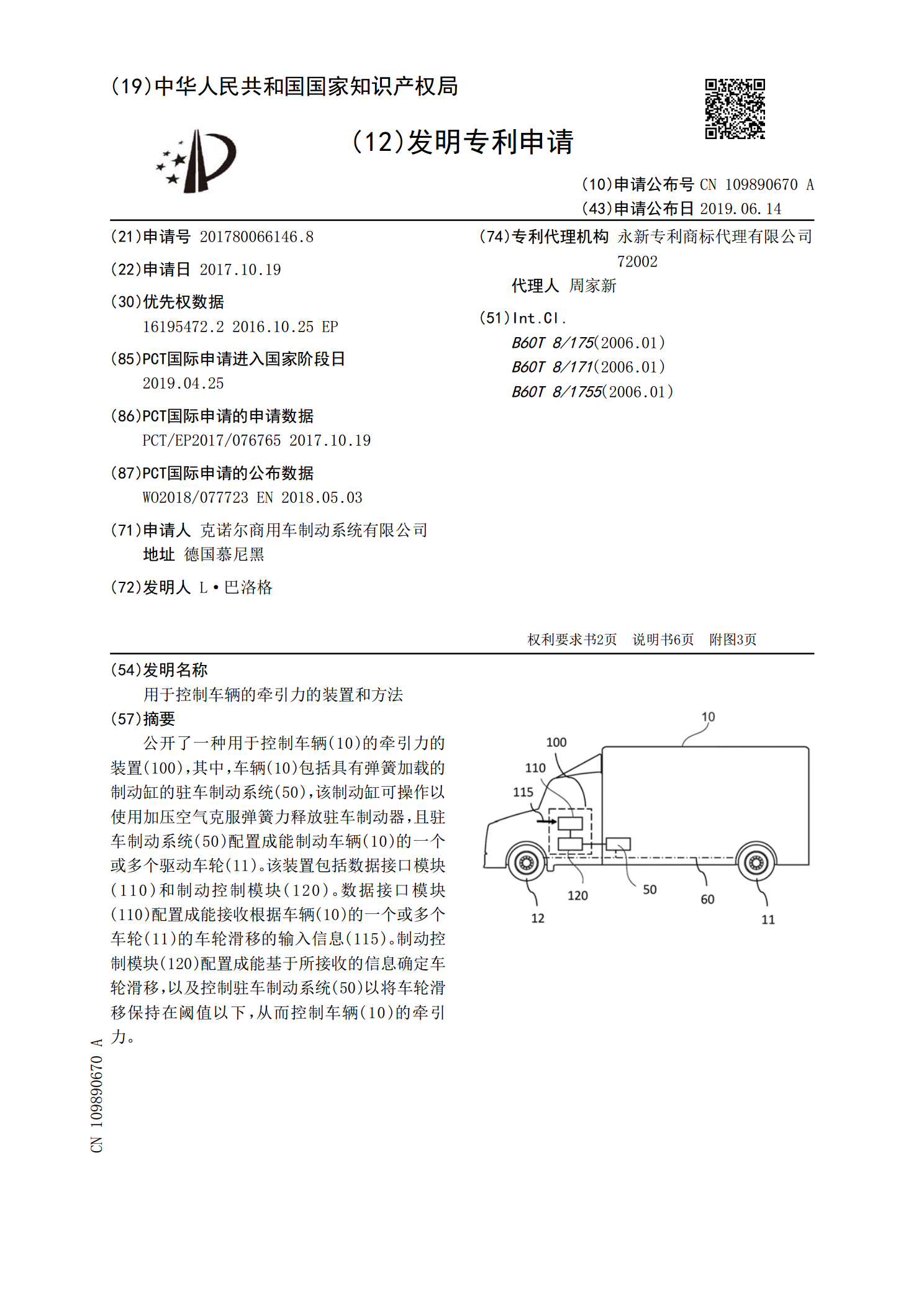
公开了一种用于控制车辆(10)的牵引力的装置(100),其中,车辆(10)包括具有弹簧加载的制动缸的驻车制动系统(50),该制动缸可操作以使用加压空气克服弹簧力释放驻车制动器,且驻车制动系统(50)配置成能制动车辆(10)的一个或多个驱动车轮(11)。该装置包括数据接口模块(110)和制动控制模块(120)。数据接口模块(110)配置成能接收根据车辆(10)的一个或多个车轮(11)的车轮滑移的输入信息(115)。制动控制模块(120)配置成能基于所接收的信息确定车轮滑移,以及控制驻车制动系统(50)以将车
用于控制车辆牵引力的方法和设备.pdf
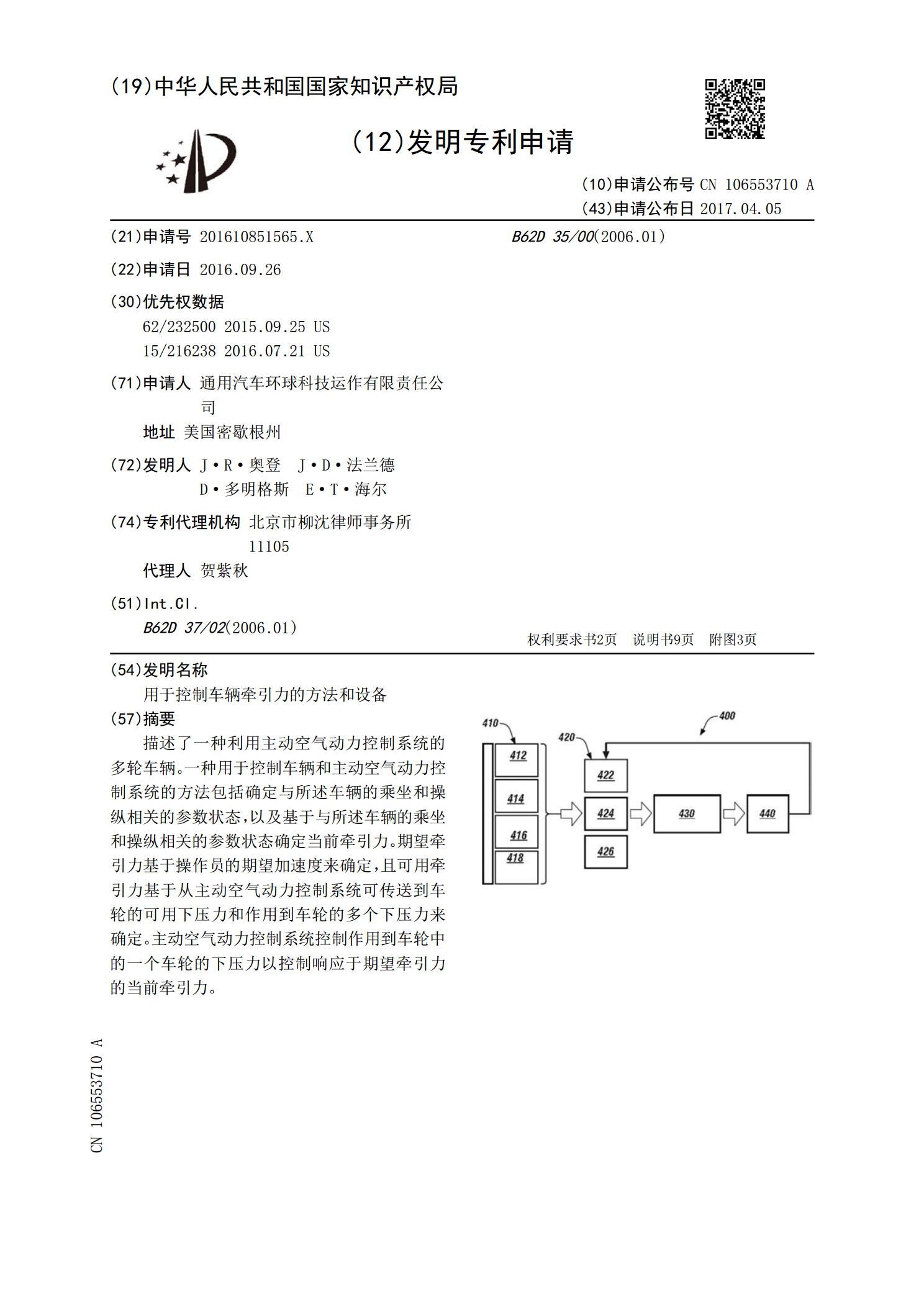
描述了一种利用主动空气动力控制系统的多轮车辆。一种用于控制车辆和主动空气动力控制系统的方法包括确定与所述车辆的乘坐和操纵相关的参数状态,以及基于与所述车辆的乘坐和操纵相关的参数状态确定当前牵引力。期望牵引力基于操作员的期望加速度来确定,且可用牵引力基于从主动空气动力控制系统可传送到车轮的可用下压力和作用到车轮的多个下压力来确定。主动空气动力控制系统控制作用到车轮中的一个车轮的下压力以控制响应于期望牵引力的当前牵引力。

用于控制车辆的方法和系统.pdf
一种对车辆状态和车辆轮胎的刚度状态进行联合估计的方法,车辆状态包括车辆的速度和转首角速度,并且刚度状态包括对车辆的至少一个轮胎与车辆正行驶在的道路的交互作用进行限定的至少一个参数。所述方法使用包括与刚度状态无关的确定性分量和取决于刚度状态的概率性分量的组合的移动模型和测量模型。所述方法利用一组质点来表示刚度状态。各个质点包括刚度状态的均值和方差,所述刚度状态的均值和方差限定刚度状态的参数的可行空间。所述方法使用估计的刚度状态与测量的刚度状态之间的差来迭代地更新至少一些质点的均值和方差,所估计的刚度状态是利
用于控制车辆的系统和方法.pdf
公开了一种用于控制车辆的系统和方法。该系统包括:车辆,获得驾驶信息和盲点图像,并且发送驾驶信息和盲点图像;以及可穿戴装置,从车辆接收驾驶信息和盲点图像,并且基于驾驶员的驾驶信息和注视信息输出盲点图像。