
船体水下链式清洗设备.pdf

甲申****66


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

船体水下链式清洗设备.pdf
船体水下链式清洗设备,由转向驱动液压马达、强磁轮、链式活动载体、高速液压马达、监控摄像头、高频振荡清洗刀片、定位机构、弹性定位块、活动杆机构、偏心机构构成,强磁轮用来提供强大的吸力,防止在船体上行走时脱离,链式活动载体,主要考虑到船体具有弧度,本载体设有多处活动关节,在走船体弧度时,可以避免机构行走不便以及清洗死角,可以轻松地在船体任何部位进行行走清洗定位机构下设有万向轮,以便来感应船体清洗部位高低的变化,从而来抬高或降低弹性定位块,并反映在活动杆机构位置的变化,最终达到高频振荡清洗刀片的位置的调节,使其

水下船体清洗机器人.pdf
本发明公开了一种水下船体清洗机器人,包括机器人载体以及安装于机器人载体的清洗装置和配套控制系统,所述机器人载体设有吸附式车轮和吸水回路;所述吸附式车轮的外圆周均匀设置有多个吸盘并通过吸盘与吸水回路的通断控制实现机器人载体在水中作业,本发明的水下船体清洗机器人,能够吸附于船体表面,并对船体外表面进行清洗;完成船体的水下清洗工作,减轻人员的工作量,降低成本,提高工作效率。

船体清洗装置.pdf
本发明公开船体清洗装置,包括清洗车、位于清洗车底部的吸附组件、位于清洗车左右两侧的若干轮式组件、位于清洗车前端的清洗机构、位于清洗机构上方的控制装置,吸附组件包括带有吸附机的吸附腔,吸附腔上方设有吸附罩,吸附腔底部贯通连接有清洗盘,清洗盘中心位置固接有主吸盘。该装置能够对船体表面附着物清洗的同时降低船体表面磨损率和锈蚀率,提升船体实用性。
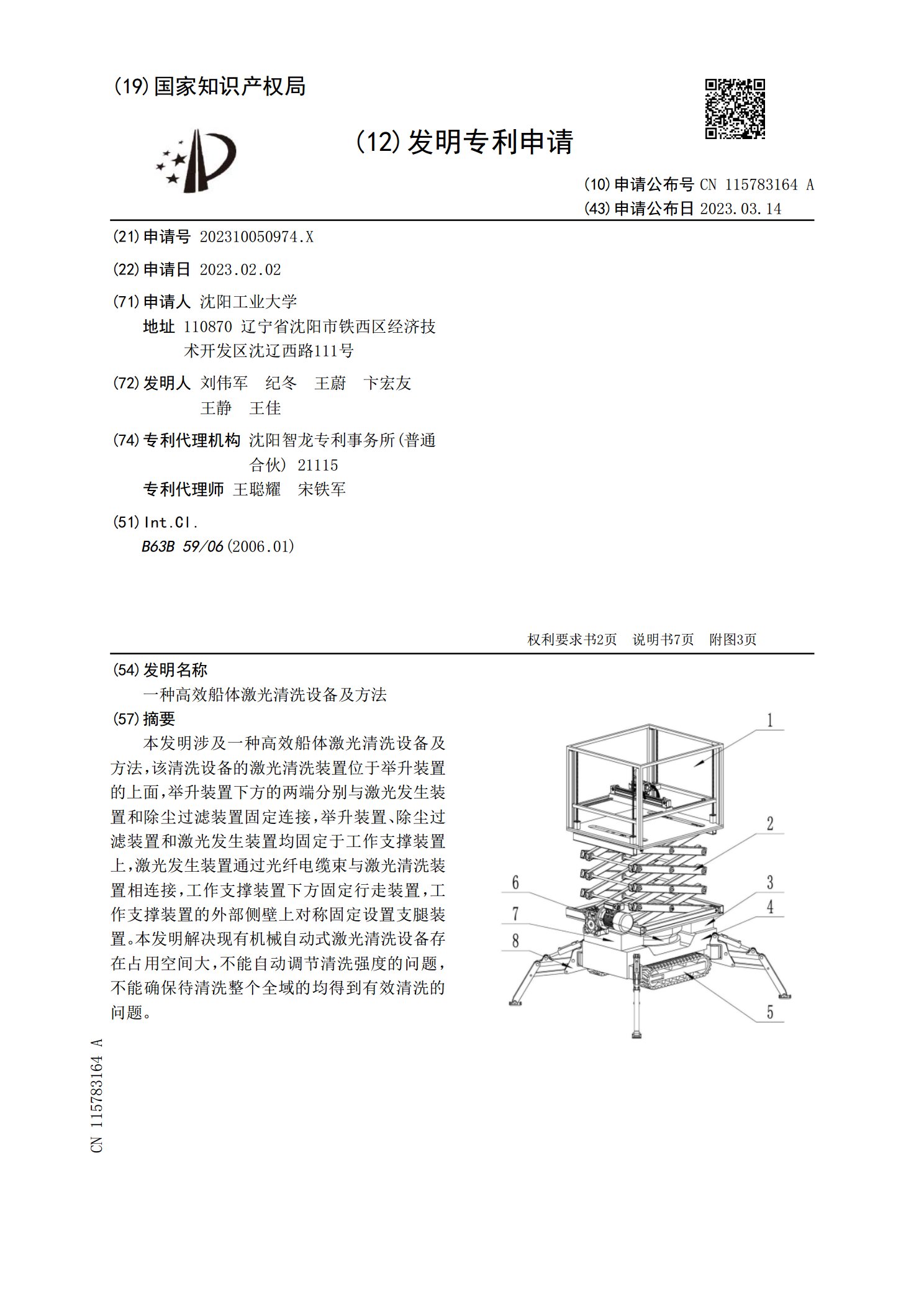
一种高效船体激光清洗设备及方法.pdf
本发明涉及一种高效船体激光清洗设备及方法,该清洗设备的激光清洗装置位于举升装置的上面,举升装置下方的两端分别与激光发生装置和除尘过滤装置固定连接,举升装置、除尘过滤装置和激光发生装置均固定于工作支撑装置上,激光发生装置通过光纤电缆束与激光清洗装置相连接,工作支撑装置下方固定行走装置,工作支撑装置的外部侧壁上对称固定设置支腿装置。本发明解决现有机械自动式激光清洗设备存在占用空间大,不能自动调节清洗强度的问题,不能确保待清洗整个全域的均得到有效清洗的问题。
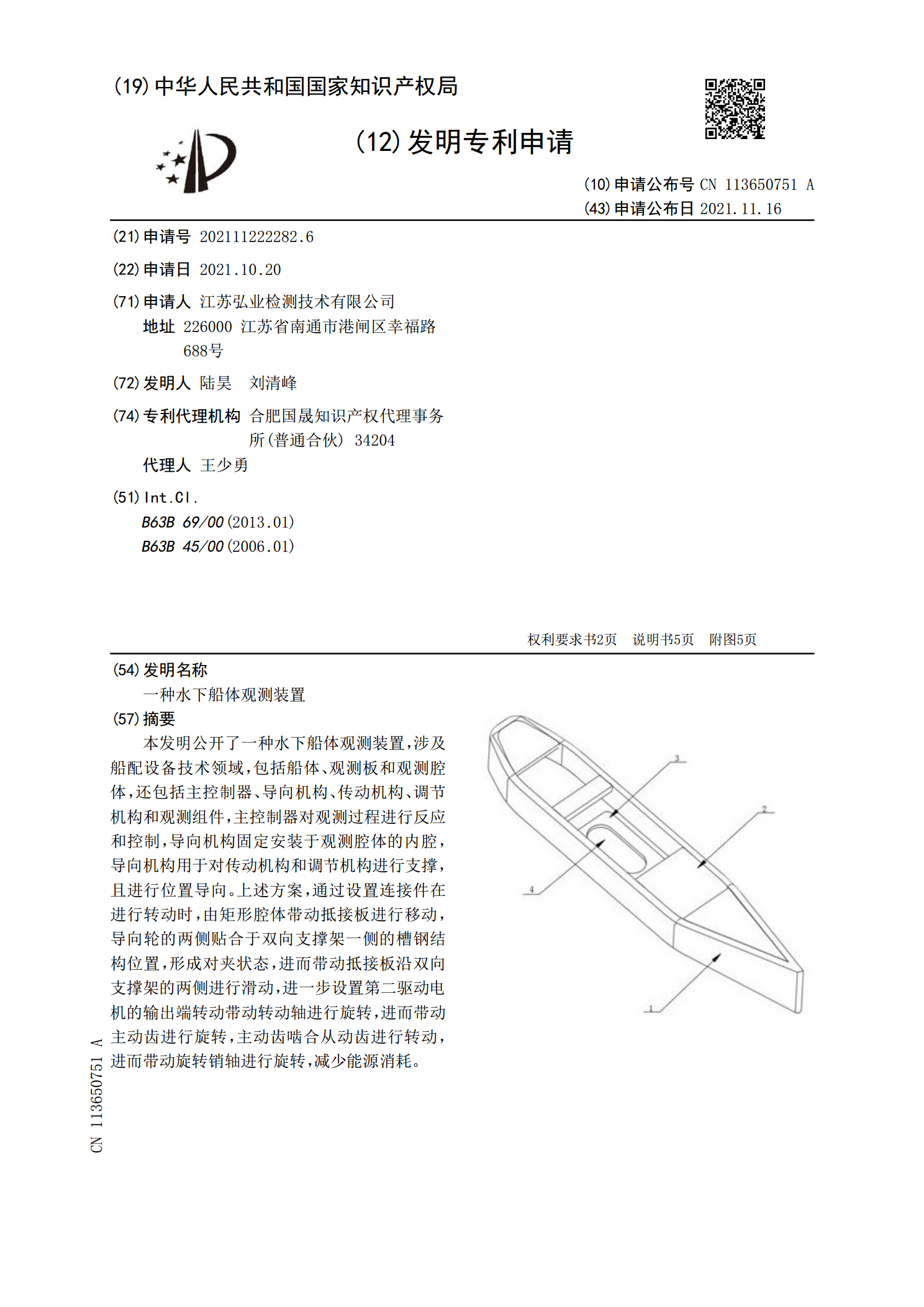
一种水下船体观测装置.pdf
本发明公开了一种水下船体观测装置,涉及船配设备技术领域,包括船体、观测板和观测腔体,还包括主控制器、导向机构、传动机构、调节机构和观测组件,主控制器对观测过程进行反应和控制,导向机构固定安装于观测腔体的内腔,导向机构用于对传动机构和调节机构进行支撑,且进行位置导向。上述方案,通过设置连接件在进行转动时,由矩形腔体带动抵接板进行移动,导向轮的两侧贴合于双向支撑架一侧的槽钢结构位置,形成对夹状态,进而带动抵接板沿双向支撑架的两侧进行滑动,进一步设置第二驱动电机的输出端转动带动转动轴进行旋转,进而带动主动齿进行