
车载多目摄像机环视系统的虚拟视点图像生成方法.pdf

沛芹****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车载多目摄像机环视系统的虚拟视点图像生成方法.pdf
本发明提供了一种车载多目摄像机环视系统的虚拟视点图像生成方法,能更准确的完成环视系统为驾驶员提供的虚拟视点图像。本发明解决了场景中存在立体障碍物时对环视图的影响,可以高速准确的检测到立体障碍物的接地轮廓线,确定障碍物与自车距离,及时发出接近报警。同时本发明区分路面区域和非路面的立体障碍物区域,分别进行视点变换,避免现有技术中虚拟视点图像上的所有点都要推算三维空间位置以及实际摄像机坐标,节省了计算时间并避免每个摄像机的外部标定精度对于合成图像精度的影响。
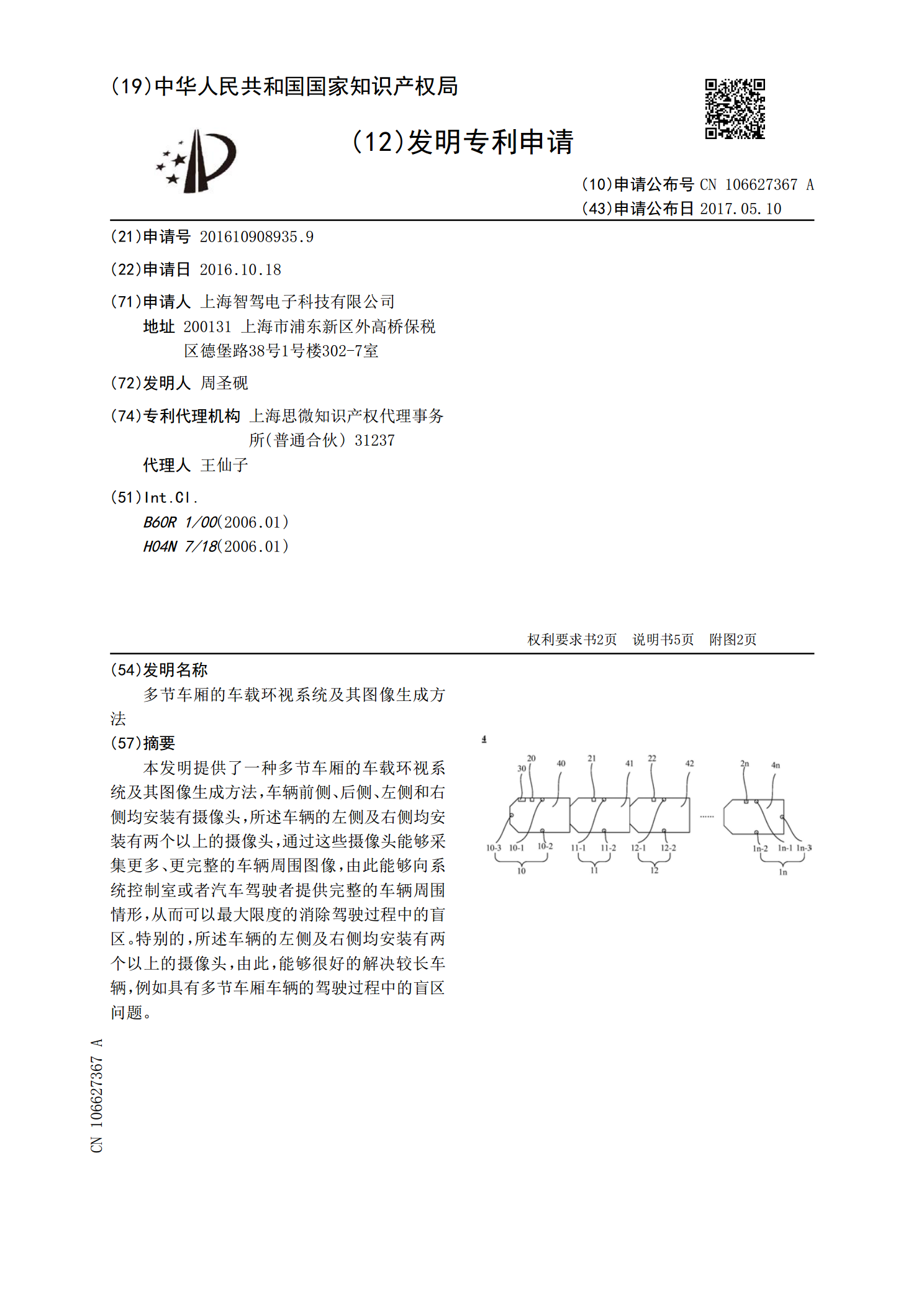
多节车厢的车载环视系统及其图像生成方法.pdf
本发明提供了一种多节车厢的车载环视系统及其图像生成方法,车辆前侧、后侧、左侧和右侧均安装有摄像头,所述车辆的左侧及右侧均安装有两个以上的摄像头,通过这些摄像头能够采集更多、更完整的车辆周围图像,由此能够向系统控制室或者汽车驾驶者提供完整的车辆周围情形,从而可以最大限度的消除驾驶过程中的盲区。特别的,所述车辆的左侧及右侧均安装有两个以上的摄像头,由此,能够很好的解决较长车辆,例如具有多节车厢车辆的驾驶过程中的盲区问题。
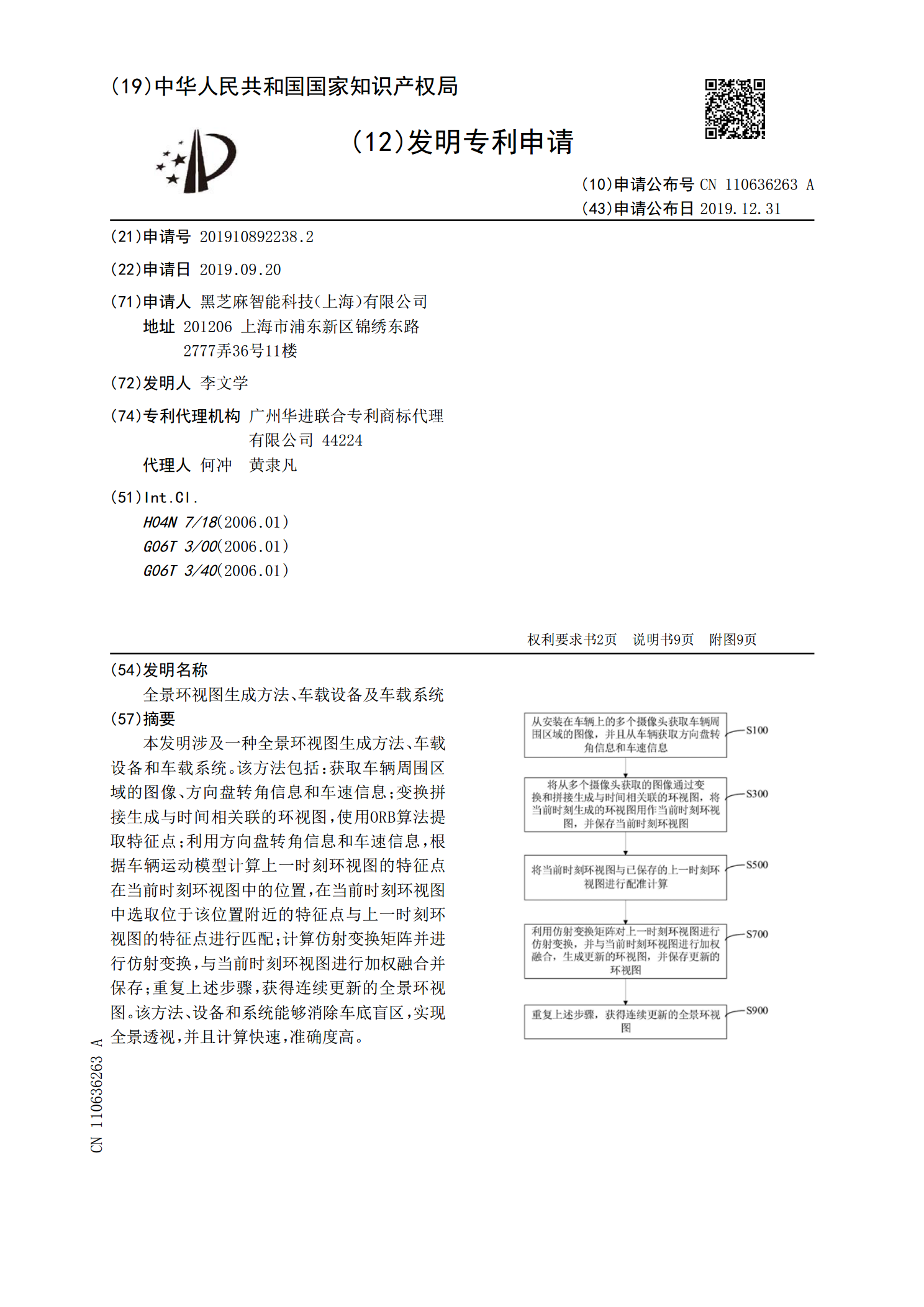
全景环视图生成方法、车载设备及车载系统.pdf
本发明涉及一种全景环视图生成方法、车载设备和车载系统。该方法包括:获取车辆周围区域的图像、方向盘转角信息和车速信息;变换拼接生成与时间相关联的环视图,使用ORB算法提取特征点;利用方向盘转角信息和车速信息,根据车辆运动模型计算上一时刻环视图的特征点在当前时刻环视图中的位置,在当前时刻环视图中选取位于该位置附近的特征点与上一时刻环视图的特征点进行匹配;计算仿射变换矩阵并进行仿射变换,与当前时刻环视图进行加权融合并保存;重复上述步骤,获得连续更新的全景环视图。该方法、设备和系统能够消除车底盲区,实现全景透视,

虚拟视点图像生成方法、系统、电子设备及存储介质.pdf
虚拟视点图像生成方法、系统、电子设备及存储介质,所述方法包括:获取多角度自由视角的图像组合、所述图像组合的参数数据以及预设的虚拟视点路径数据;根据所述预设的虚拟视点路径数据及所述图像组合的参数数据,从图像组合中选择虚拟视点路径中各虚拟视点的相应组的纹理图和深度图;将各虚拟视点的相应组的纹理图和深度图输入至图形处理器中,针对虚拟视点路径中各虚拟视点,以像素点为处理单位,由多个线程分别将选择的图像组合中相应组的纹理图和深度图中的像素点进行组合渲染,得到所述虚拟视点对应的图像。上述方案可以提升数据处理速度,满足
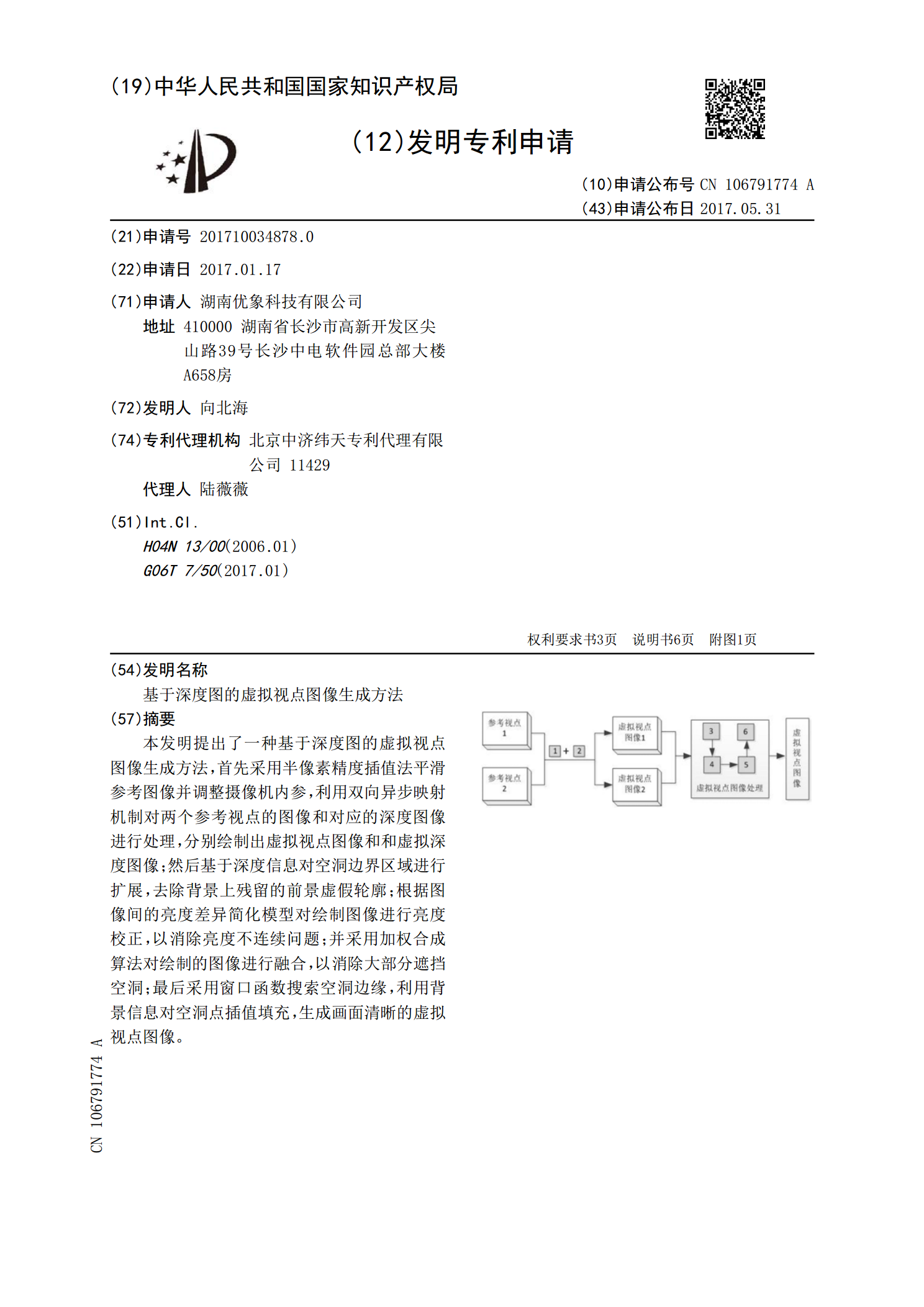
基于深度图的虚拟视点图像生成方法.pdf
本发明提出了一种基于深度图的虚拟视点图像生成方法,首先采用半像素精度插值法平滑参考图像并调整摄像机内参,利用双向异步映射机制对两个参考视点的图像和对应的深度图像进行处理,分别绘制出虚拟视点图像和和虚拟深度图像;然后基于深度信息对空洞边界区域进行扩展,去除背景上残留的前景虚假轮廓;根据图像间的亮度差异简化模型对绘制图像进行亮度校正,以消除亮度不连续问题;并采用加权合成算法对绘制的图像进行融合,以消除大部分遮挡空洞;最后采用窗口函数搜索空洞边缘,利用背景信息对空洞点插值填充,生成画面清晰的虚拟视点图像。