
多节车厢的车载环视系统及其图像生成方法.pdf

黛娥****ak


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多节车厢的车载环视系统及其图像生成方法.pdf
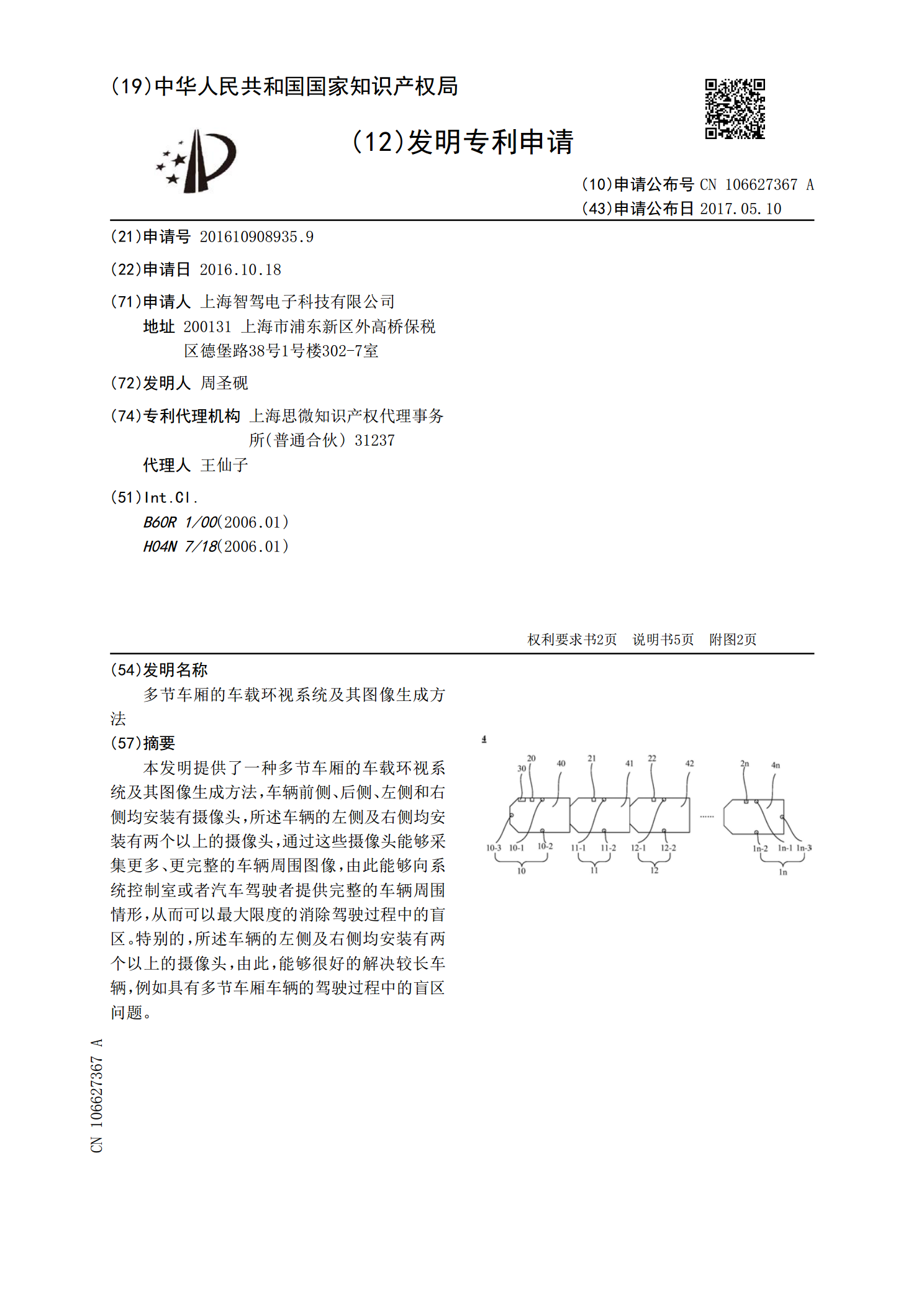
本发明提供了一种多节车厢的车载环视系统及其图像生成方法,车辆前侧、后侧、左侧和右侧均安装有摄像头,所述车辆的左侧及右侧均安装有两个以上的摄像头,通过这些摄像头能够采集更多、更完整的车辆周围图像,由此能够向系统控制室或者汽车驾驶者提供完整的车辆周围情形,从而可以最大限度的消除驾驶过程中的盲区。特别的,所述车辆的左侧及右侧均安装有两个以上的摄像头,由此,能够很好的解决较长车辆,例如具有多节车厢车辆的驾驶过程中的盲区问题。
全景环视图生成方法、车载设备及车载系统.pdf
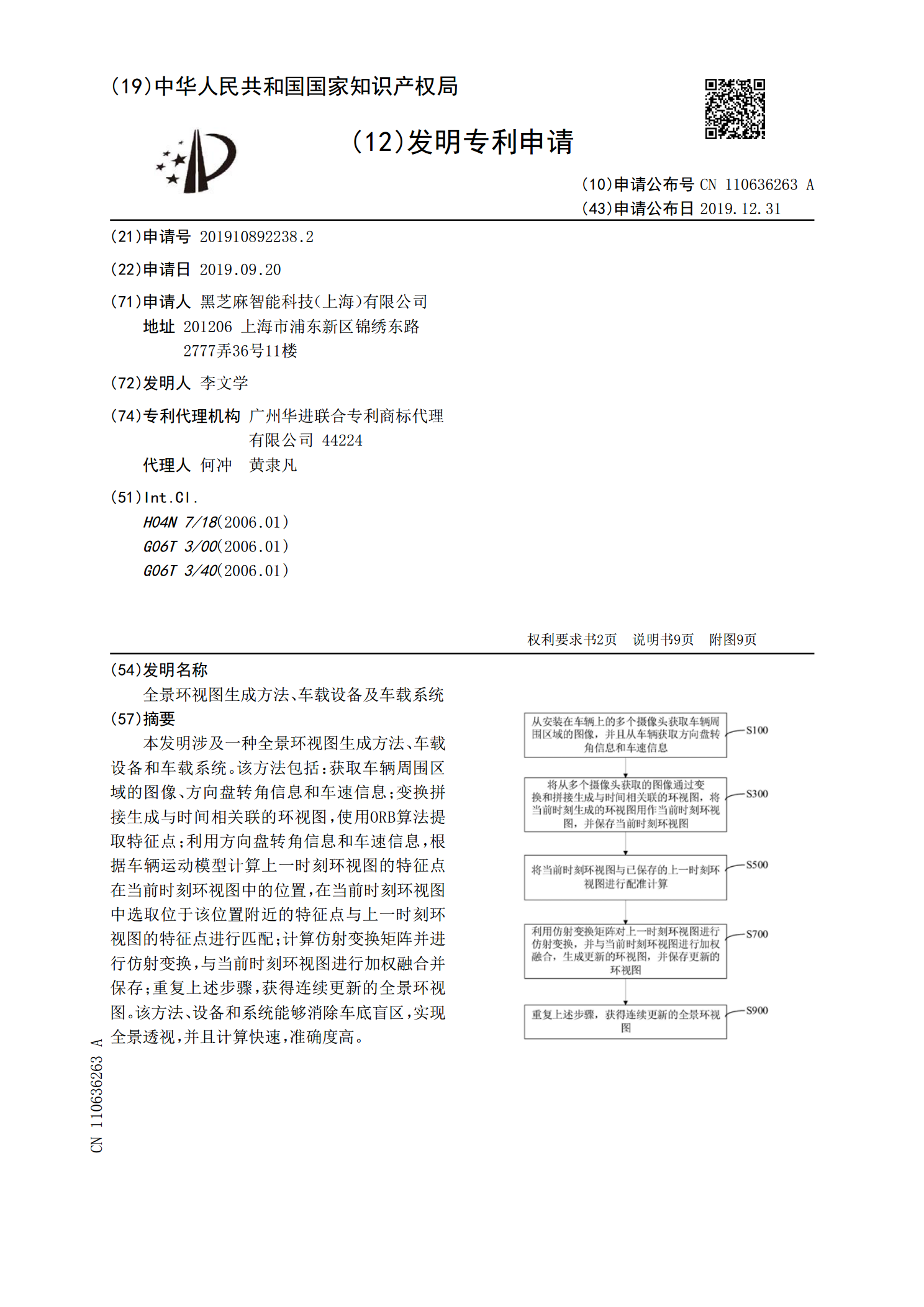
本发明涉及一种全景环视图生成方法、车载设备和车载系统。该方法包括:获取车辆周围区域的图像、方向盘转角信息和车速信息;变换拼接生成与时间相关联的环视图,使用ORB算法提取特征点;利用方向盘转角信息和车速信息,根据车辆运动模型计算上一时刻环视图的特征点在当前时刻环视图中的位置,在当前时刻环视图中选取位于该位置附近的特征点与上一时刻环视图的特征点进行匹配;计算仿射变换矩阵并进行仿射变换,与当前时刻环视图进行加权融合并保存;重复上述步骤,获得连续更新的全景环视图。该方法、设备和系统能够消除车底盲区,实现全景透视,

车载多目摄像机环视系统的虚拟视点图像生成方法.pdf
本发明提供了一种车载多目摄像机环视系统的虚拟视点图像生成方法,能更准确的完成环视系统为驾驶员提供的虚拟视点图像。本发明解决了场景中存在立体障碍物时对环视图的影响,可以高速准确的检测到立体障碍物的接地轮廓线,确定障碍物与自车距离,及时发出接近报警。同时本发明区分路面区域和非路面的立体障碍物区域,分别进行视点变换,避免现有技术中虚拟视点图像上的所有点都要推算三维空间位置以及实际摄像机坐标,节省了计算时间并避免每个摄像机的外部标定精度对于合成图像精度的影响。
一种车载环视显示方法及其系统.pdf
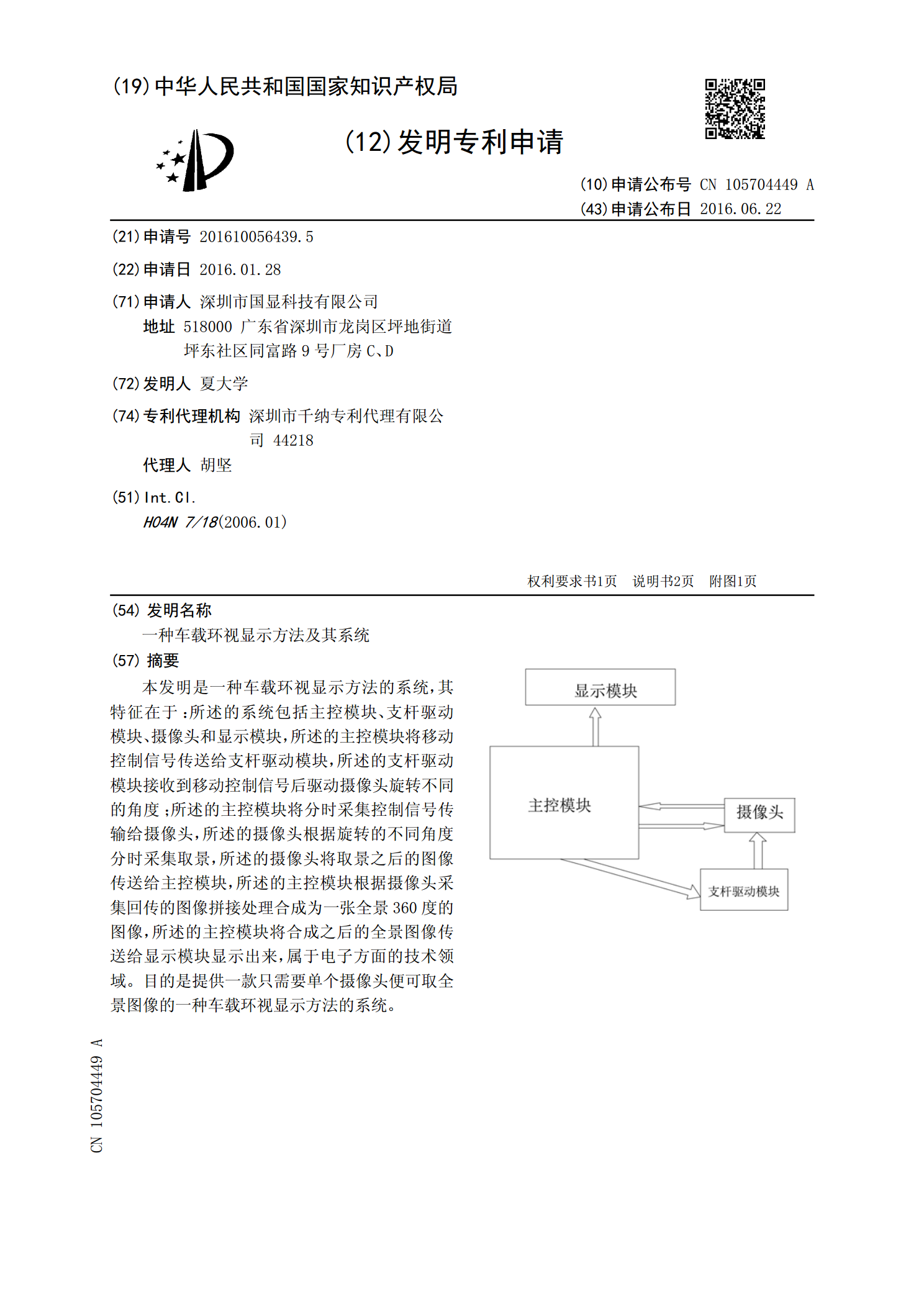
本发明是一种车载环视显示方法的系统,其特征在于:所述的系统包括主控模块、支杆驱动模块、摄像头和显示模块,所述的主控模块将移动控制信号传送给支杆驱动模块,所述的支杆驱动模块接收到移动控制信号后驱动摄像头旋转不同的角度;所述的主控模块将分时采集控制信号传输给摄像头,所述的摄像头根据旋转的不同角度分时采集取景,所述的摄像头将取景之后的图像传送给主控模块,所述的主控模块根据摄像头采集回传的图像拼接处理合成为一张全景360度的图像,所述的主控模块将合成之后的全景图像传送给显示模块显示出来,属于电子方面的技术领域。目

3D车载环视全景生成方法.docx
3D车载环视全景生成方法随着汽车的普及,车联网和自动驾驶技术的不断发展,车载环视全景成为了汽车的重要趋势之一。车载环视全景可以为驾驶员提供更全面、直观的视角,帮助他们更准确地判断车辆周围的道路情况和障碍物,并提高驾驶员的安全性和驾驶体验。本文将介绍车载环视全景生成方法的原理与应用,包括传统方式和新兴技术,并对它们的优缺点和发展方向进行讨论。一、传统方式1.多摄像机方案多摄像头方案是目前汽车上常见的环视全景方案。通过控制摄像机的方向和视角,将多个视角的图像拼接起来,形成一个全景图。这种方法的优点是视角全面,