
基于深度图的虚拟视点图像生成方法.pdf

St****36

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度图的虚拟视点图像生成方法.pdf
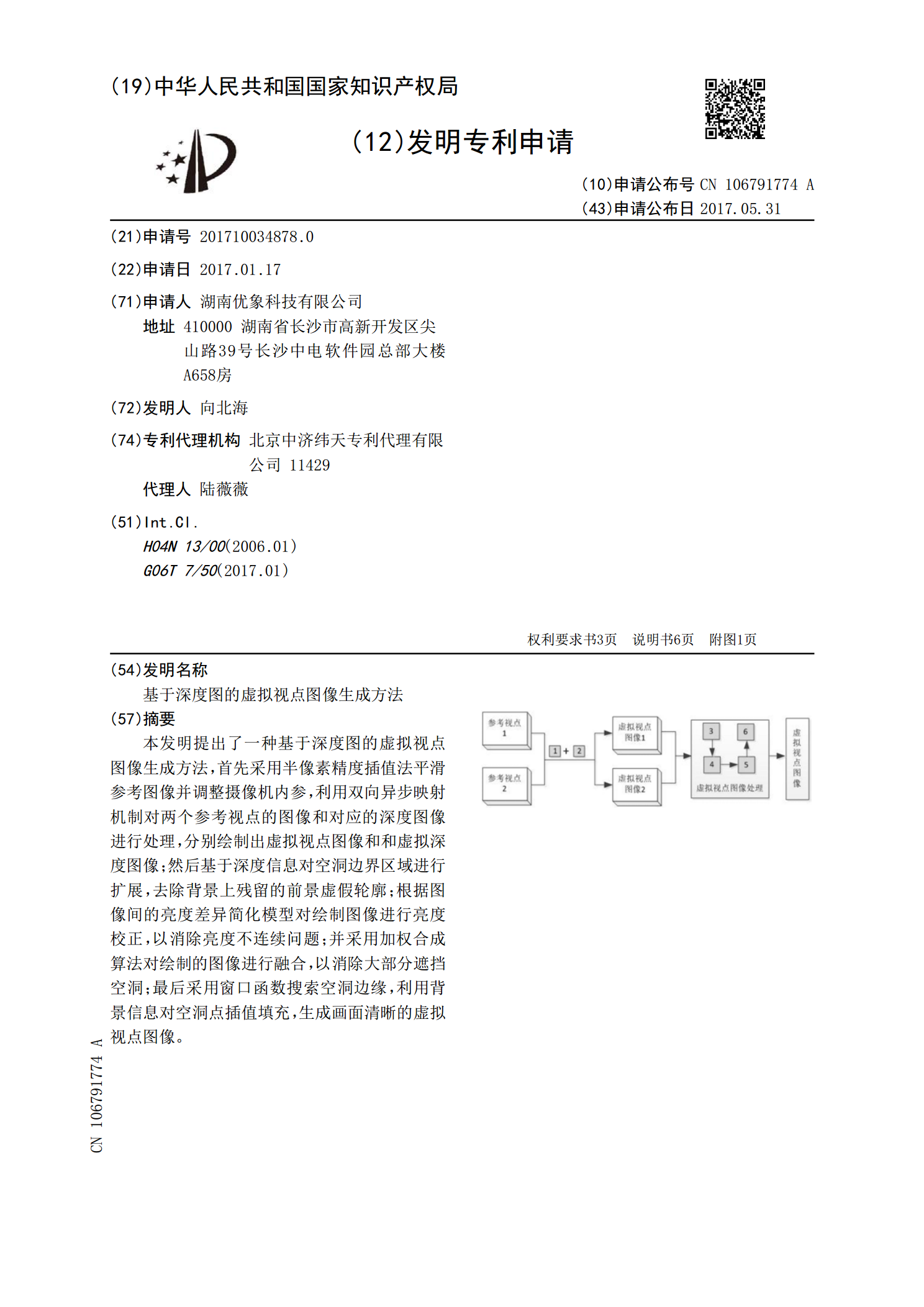
本发明提出了一种基于深度图的虚拟视点图像生成方法,首先采用半像素精度插值法平滑参考图像并调整摄像机内参,利用双向异步映射机制对两个参考视点的图像和对应的深度图像进行处理,分别绘制出虚拟视点图像和和虚拟深度图像;然后基于深度信息对空洞边界区域进行扩展,去除背景上残留的前景虚假轮廓;根据图像间的亮度差异简化模型对绘制图像进行亮度校正,以消除亮度不连续问题;并采用加权合成算法对绘制的图像进行融合,以消除大部分遮挡空洞;最后采用窗口函数搜索空洞边缘,利用背景信息对空洞点插值填充,生成画面清晰的虚拟视点图像。

基于深度图像的虚拟视点绘制方法研究的任务书.docx
基于深度图像的虚拟视点绘制方法研究的任务书任务书一、研究背景和意义随着深度图像获取技术的不断成熟,基于深度图像的虚拟视点绘制技术逐渐成为了一个热门研究领域。虚拟视点绘制技术可以利用已有的深度图像数据快速生成多个视角的图像,可以为多种应用提供支持,如虚拟现实、增强现实、远程会议等。在实际应用中,虚拟视点绘制技术可以为用户提供全方位、全角度的视觉体验,增强用户与虚拟环境之间的沉浸感。当前,基于深度图像的虚拟视点绘制技术仍存在很多问题和挑战。在具体实现上,需要考虑多个因素,如深度图像的质量、绘制的视点数量、光照

基于集成图像重建的虚拟视点图像阵列生成方法研究的开题报告.docx
基于集成图像重建的虚拟视点图像阵列生成方法研究的开题报告一、选题背景和意义虚拟视点图像阵列(VISTA)是指通过对现有图像进行处理生成全挂的图像集合,以动态地演示三维场景的变化。VISTA技术已经广泛应用于电影、电视剧、游戏等领域,可以提供更加出色的观看体验。目前,基于传统的多摄像机系统生成VISTA的方法存在缺陷,如成本高、空间占用大等。因此,研究基于集成图像重建的VISTA生成方法已经成为当前的研究热点。二、研究内容和方法本论文将研究基于集成图像重建的VISTA生成方法。具体研究内容包括:1.改进基于

基于集成图像重建的虚拟视点图像阵列生成方法研究的任务书.docx
基于集成图像重建的虚拟视点图像阵列生成方法研究的任务书任务书一、任务目的本次任务的目的是通过研究基于集成图像重建的虚拟视点图像阵列生成方法,探索一种新的图像生成技术,用于虚拟现实领域的应用。通过此项任务,旨在:1.深入了解集成图像重建及其相关技术,并探究它们在虚拟视点图像生成中的应用;2.研究并实现基于集成图像重建的虚拟视点图像阵列生成方法;3.对比分析该方法与传统方法在虚拟现实场景下的表现,验证该方法的优越性。二、任务描述近年来,虚拟现实技术成为了各行各业公认的前沿技术之一。而虚拟视点图像生成则是虚拟现

一种基于深度图像的新视点合成方法.pdf
一种基于深度图像的新视点合成方法,对左右参考视点处的纹理图与深度图进行三维变换;搜索左右参考视点深度图中对象的边缘,将边缘像素进行三维变换到新视点处,然后将新视点处对应的深度像素点抹去;对得到的深度图进行中值滤波,并将经过滤波之后的图像与经三维变换得到的深度图进行对比,标记出变化的像素点;对被标记的像素点进行反向投影,投影到原先的参考视点处,再将初始参考纹理图中的像素值,赋给新视点图像中,与被标记像素点坐标相同的像素;再对得到的新视点图像的遮挡区域进行插值;对残留的空洞进行修复,得到最终的新视点图像。本发