
全景环视图生成方法、车载设备及车载系统.pdf

靖烟****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全景环视图生成方法、车载设备及车载系统.pdf
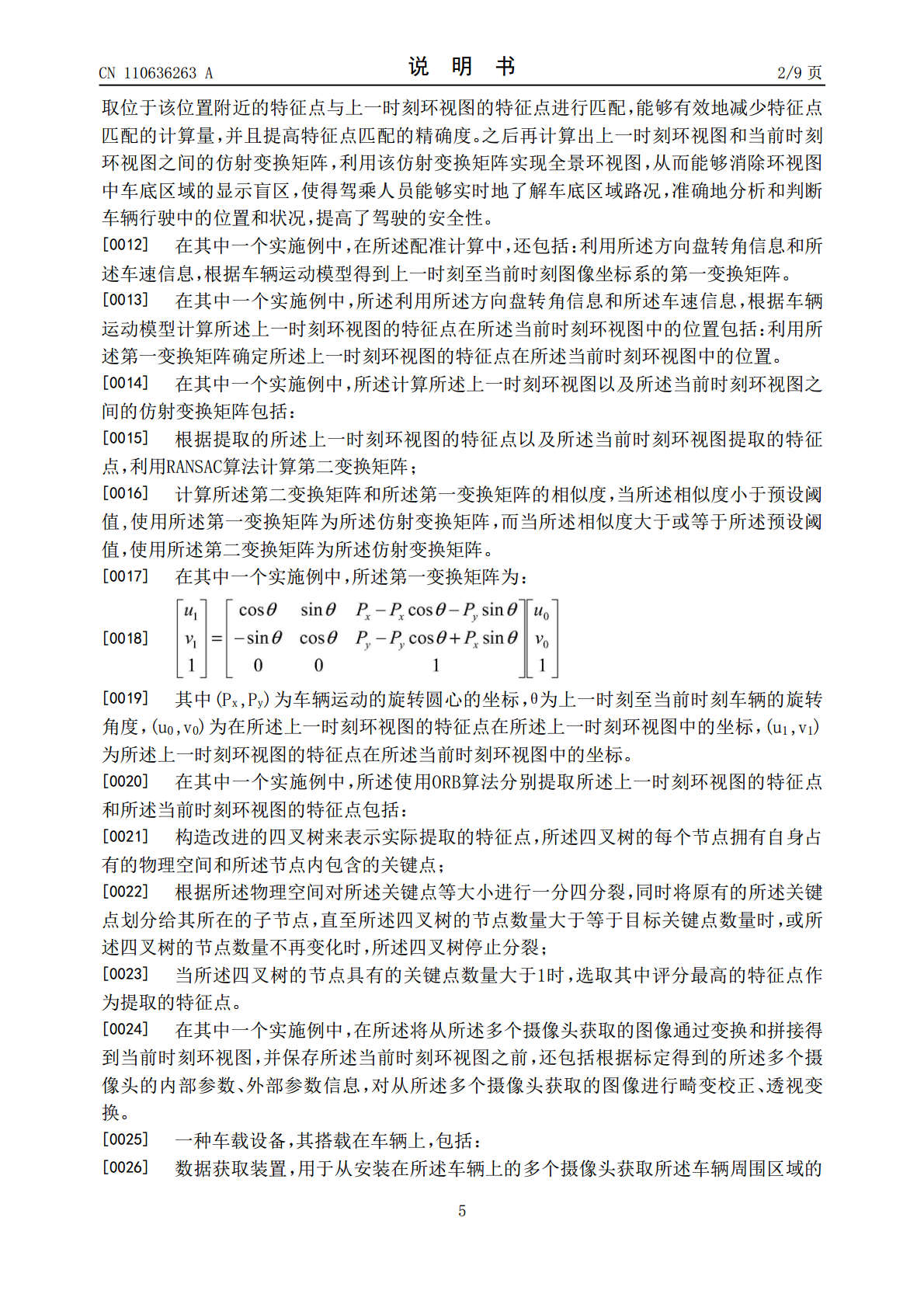
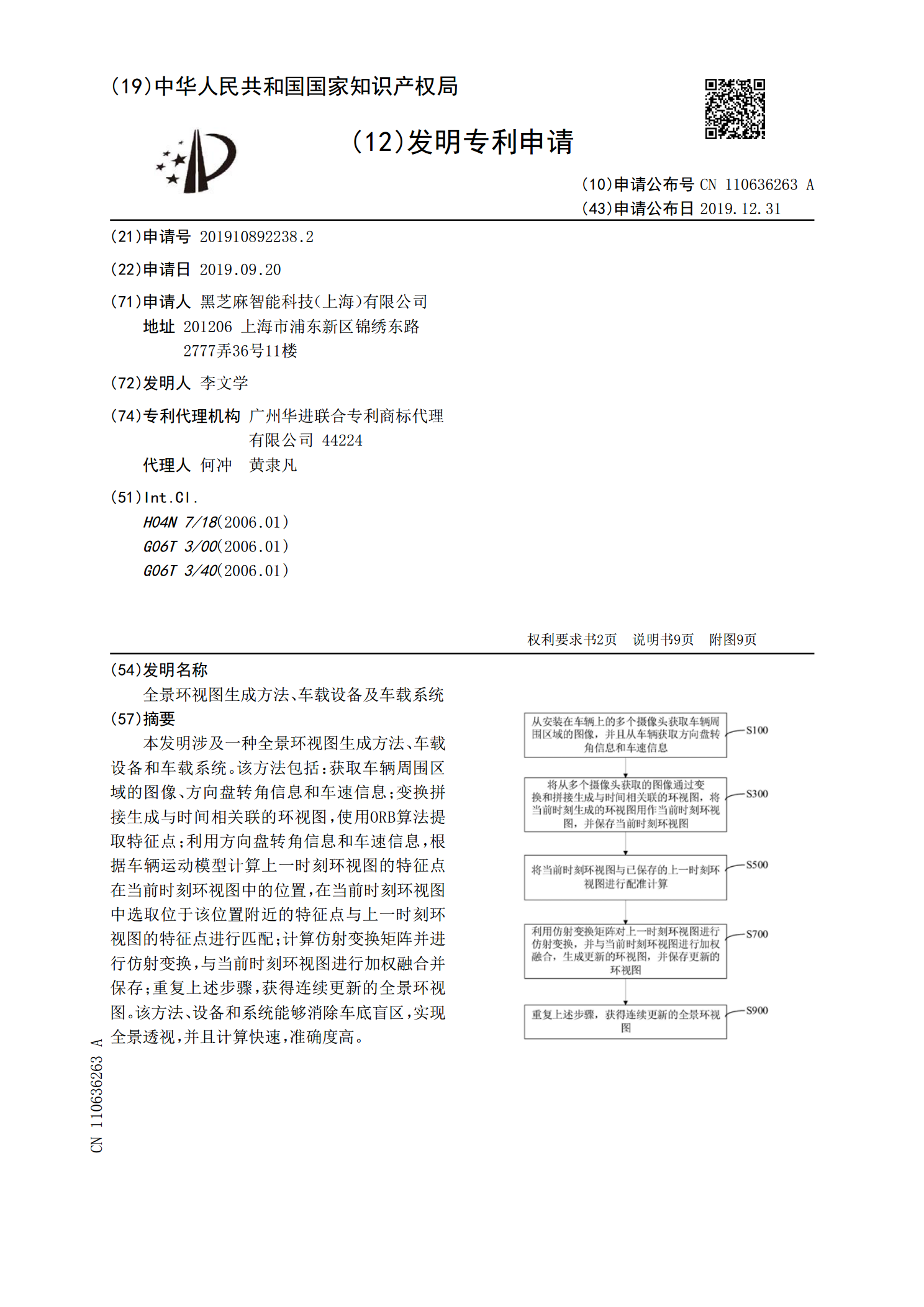
本发明涉及一种全景环视图生成方法、车载设备和车载系统。该方法包括:获取车辆周围区域的图像、方向盘转角信息和车速信息;变换拼接生成与时间相关联的环视图,使用ORB算法提取特征点;利用方向盘转角信息和车速信息,根据车辆运动模型计算上一时刻环视图的特征点在当前时刻环视图中的位置,在当前时刻环视图中选取位于该位置附近的特征点与上一时刻环视图的特征点进行匹配;计算仿射变换矩阵并进行仿射变换,与当前时刻环视图进行加权融合并保存;重复上述步骤,获得连续更新的全景环视图。该方法、设备和系统能够消除车底盲区,实现全景透视,
车载全景图生成方法、装置及系统.pdf
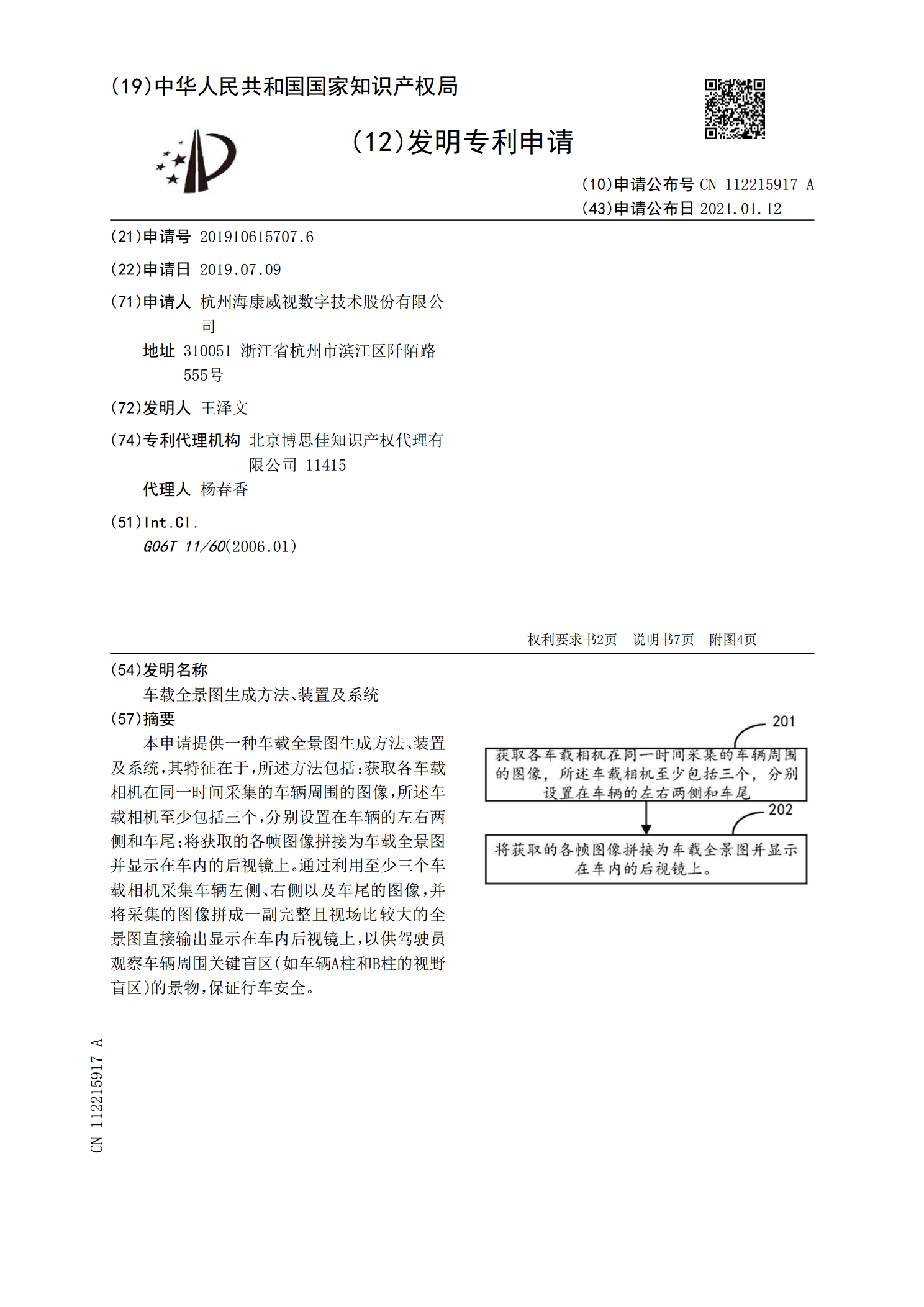
本申请提供一种车载全景图生成方法、装置及系统,其特征在于,所述方法包括:获取各车载相机在同一时间采集的车辆周围的图像,所述车载相机至少包括三个,分别设置在车辆的左右两侧和车尾;将获取的各帧图像拼接为车载全景图并显示在车内的后视镜上。通过利用至少三个车载相机采集车辆左侧、右侧以及车尾的图像,并将采集的图像拼成一副完整且视场比较大的全景图直接输出显示在车内后视镜上,以供驾驶员观察车辆周围关键盲区(如车辆A柱和B柱的视野盲区)的景物,保证行车安全。

3D车载环视全景生成方法.docx
3D车载环视全景生成方法随着汽车的普及,车联网和自动驾驶技术的不断发展,车载环视全景成为了汽车的重要趋势之一。车载环视全景可以为驾驶员提供更全面、直观的视角,帮助他们更准确地判断车辆周围的道路情况和障碍物,并提高驾驶员的安全性和驾驶体验。本文将介绍车载环视全景生成方法的原理与应用,包括传统方式和新兴技术,并对它们的优缺点和发展方向进行讨论。一、传统方式1.多摄像机方案多摄像头方案是目前汽车上常见的环视全景方案。通过控制摄像机的方向和视角,将多个视角的图像拼接起来,形成一个全景图。这种方法的优点是视角全面,

车载终端、车载智能报警系统及报警生成方法.pdf
本发明提供了一种车载终端、车载智能报警系统及报警生成方法,涉及车载报警系统领域。该系统包含:车载终端设置于车辆中,包含RFID读写器、车门关闭检测装置、处理器和报警器;RFID读写器模块,用于读取外部RFID标签,获取RFID标签持有人的信息,将所述信息发送到处理器;车门关闭检测装置,用于将车门闭合信号发送到处理器;处理器,在接收到所述车门闭合信号后检测报警触发条件,在检测到报警触发条件后,根据接收到的RFID标签持有人的信息,生成报警信息,发给报警器;报警器,用于向外部提供报警信息。本发明通过在有儿童遗
一种车载全景影像标定方法及系统.pdf
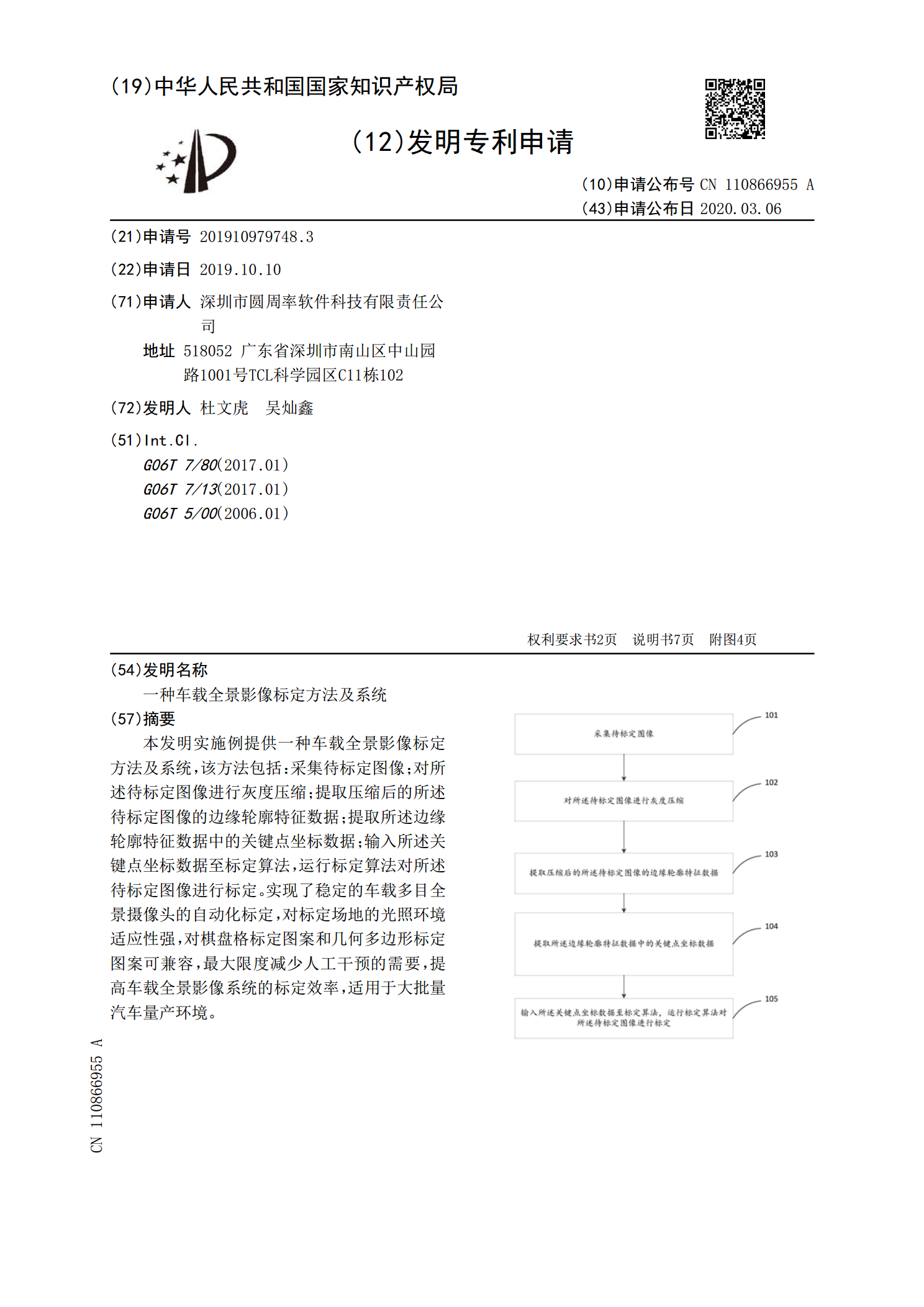
本发明实施例提供一种车载全景影像标定方法及系统,该方法包括:采集待标定图像;对所述待标定图像进行灰度压缩;提取压缩后的所述待标定图像的边缘轮廓特征数据;提取所述边缘轮廓特征数据中的关键点坐标数据;输入所述关键点坐标数据至标定算法,运行标定算法对所述待标定图像进行标定。实现了稳定的车载多目全景摄像头的自动化标定,对标定场地的光照环境适应性强,对棋盘格标定图案和几何多边形标定图案可兼容,最大限度减少人工干预的需要,提高车载全景影像系统的标定效率,适用于大批量汽车量产环境。