
具有双枢转连接部的电动关节和采用该关节的拟人机器人.pdf

努力****元恺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有双枢转连接部的电动关节和采用该关节的拟人机器人.pdf
本发明涉及具有两个枢转连接部的电动关节和采用这种关节的拟人机器人。该关节包括轴线不平行的两个枢转连接部、通过第一减速器(51)驱动所述两个枢转连接部中的第一个(16)的第一电机(50),和通过第二减速器(53)驱动所述两个枢转连接部中的第二个的第二电机(52)。根本发明,这两个减速器中的一个(53)包括位于通过此减速器(53)相关联的电机(52)和枢转连接部(17)之间的斜齿轮(62)。

具有带可枢转连杆的双球形关节运动接头的外科器械.pdf
本发明公开了具有关节运动接头的外科器械,该关节运动接头包括关节运动连接件组件,该关节运动连接件组件包括多个连杆,该多个连杆被构造成能够与近侧接头构件可操作地相接以用于相对于该近侧接头构件在彼此横向的第一近侧行进路径和第二近侧行进路径中可动地行进。该多个连杆被进一步构造成能够与远侧接头构件可操作地相接以用于相对于该远侧接头构件在彼此横向的第一远侧行进路径和第二远侧行进路径中可动地行进。

一种运动灵活稳定的机器人关节及具有该关节的机器人.pdf
本发明公开了一种运动灵活稳定的机器人关节,包括可发生相对转动的第一组件和第二组件,所述第一组件上固定设置有电机,所述电机连接有减速器,所述减速器设置有输出轴,所述第二组件上固定设置有连接柱,所述连接柱和输出轴通过传动装置连接,所述关节还包括控制装置和用以检测第一组件或第二组件位置的传感器,所述控制装置与所述电机、传感器电连接,通过传动装置连接输出轴与连接柱,可将电机设置在离关节较远的地方,调节更加灵活;采用传动装置连接来替代现有的直接啮合传动,且应用减速器控制输出轴的转速,使传动更加平稳。本发明还提供一种
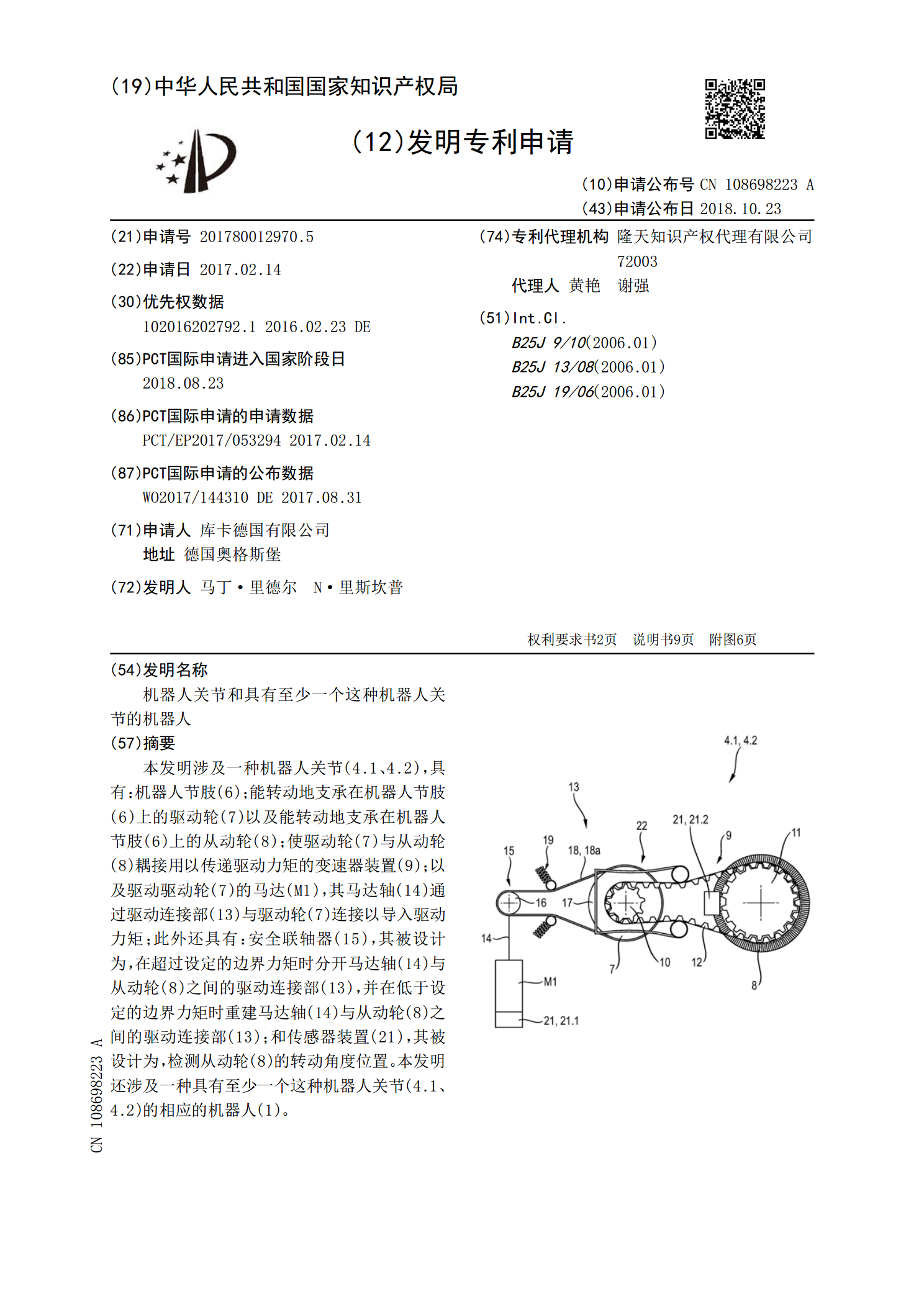
机器人关节和具有至少一个这种机器人关节的机器人.pdf
本发明涉及一种机器人关节(4.1、4.2),具有:机器人节肢(6);能转动地支承在机器人节肢(6)上的驱动轮(7)以及能转动地支承在机器人节肢(6)上的从动轮(8);使驱动轮(7)与从动轮(8)耦接用以传递驱动力矩的变速器装置(9);以及驱动驱动轮(7)的马达(M1),其马达轴(14)通过驱动连接部(13)与驱动轮(7)连接以导入驱动力矩;此外还具有:安全联轴器(15),其被设计为,在超过设定的边界力矩时分开马达轴(14)与从动轮(8)之间的驱动连接部(13),并在低于设定的边界力矩时重建马达轴(14)与
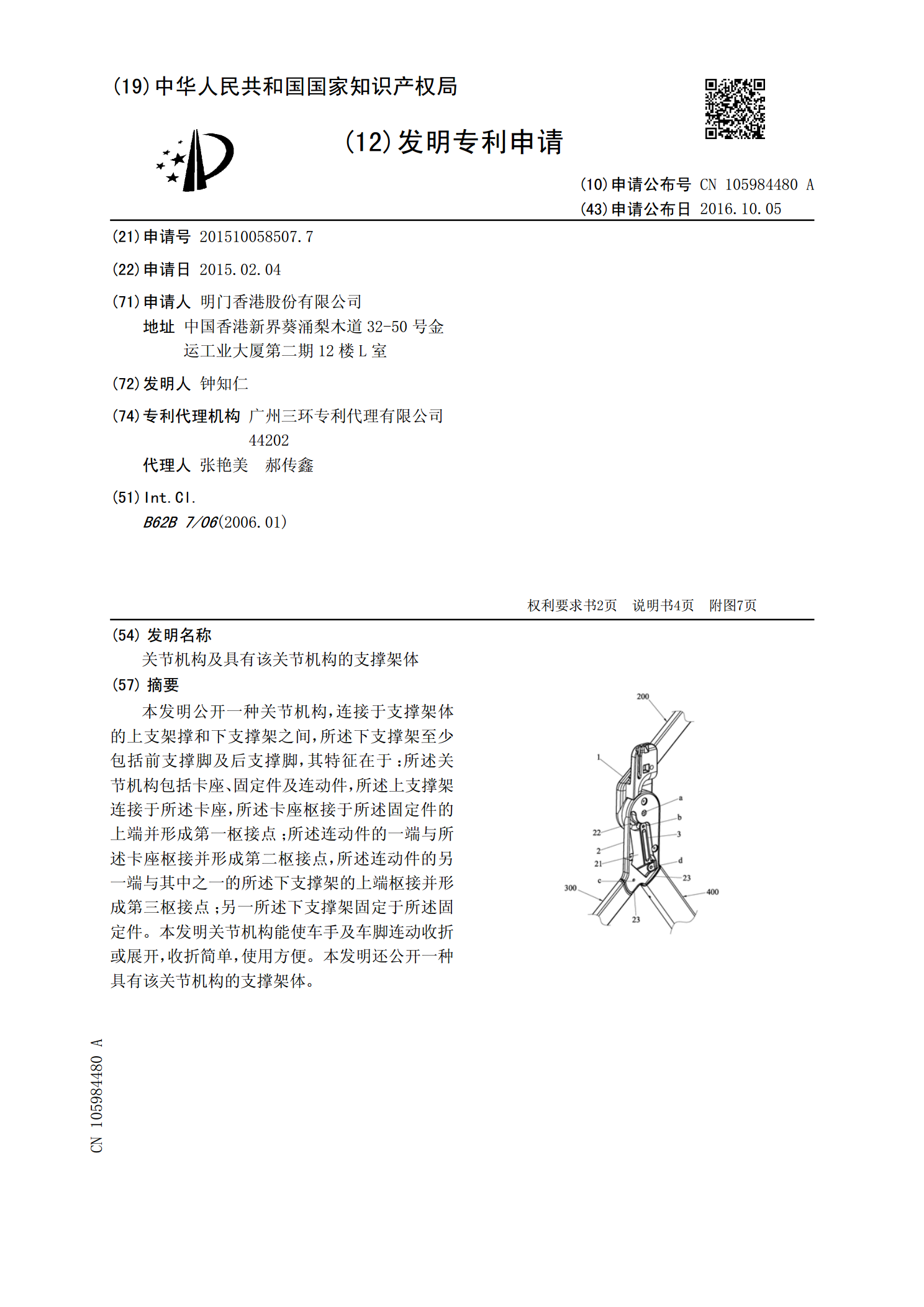
关节机构及具有该关节机构的支撑架体.pdf
本发明公开一种关节机构,连接于支撑架体的上支架撑和下支撑架之间,所述下支撑架至少包括前支撑脚及后支撑脚,其特征在于:所述关节机构包括卡座、固定件及连动件,所述上支撑架连接于所述卡座,所述卡座枢接于所述固定件的上端并形成第一枢接点;所述连动件的一端与所述卡座枢接并形成第二枢接点,所述连动件的另一端与其中之一的所述下支撑架的上端枢接并形成第三枢接点;另一所述下支撑架固定于所述固定件。本发明关节机构能使车手及车脚连动收折或展开,收折简单,使用方便。本发明还公开一种具有该关节机构的支撑架体。