
微创血管介入手术机器人导管/导丝旋转机构及推进装置.pdf

冷霜****魔王


1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
微创血管介入手术机器人导管/导丝旋转机构及推进装置.pdf
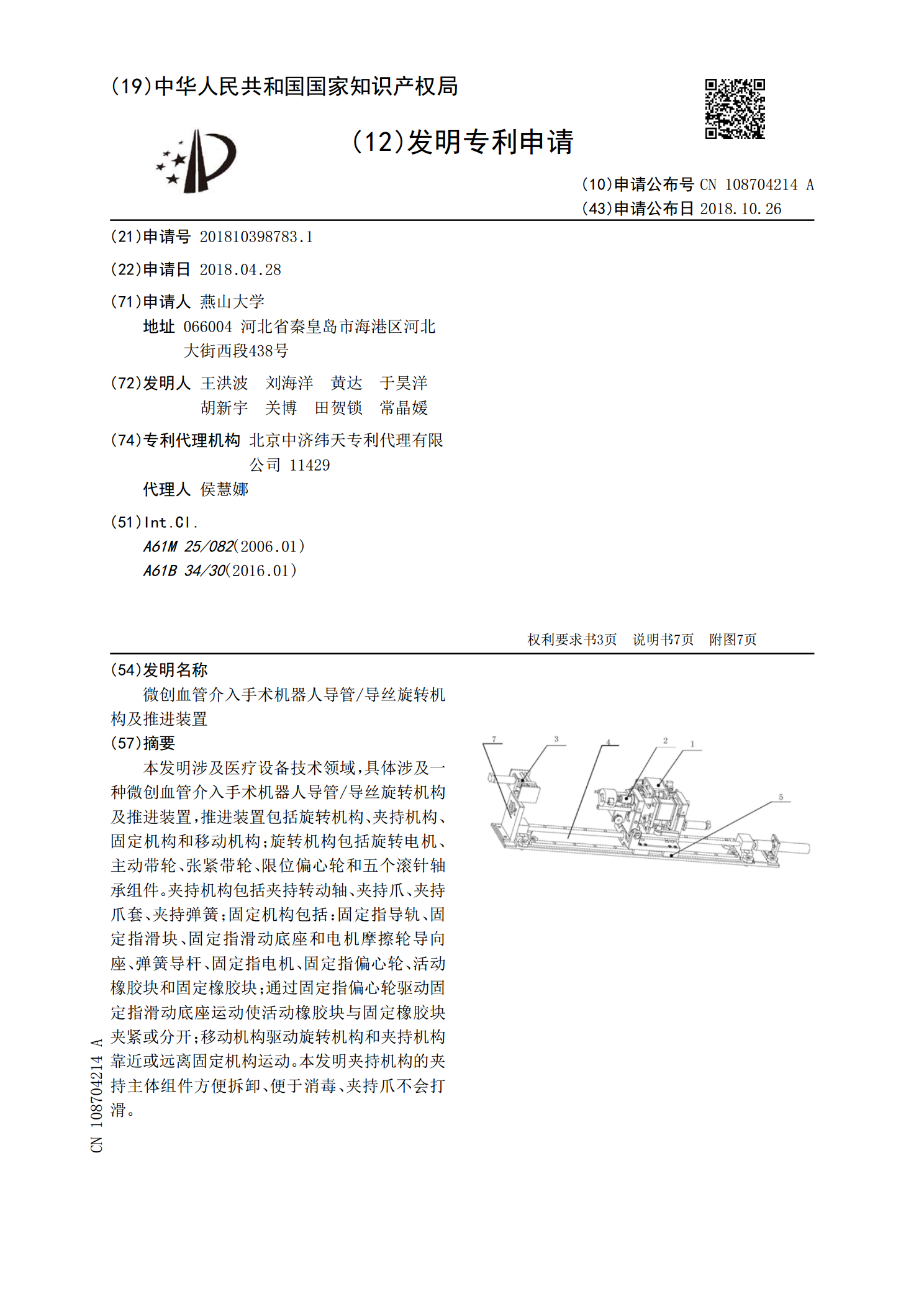
本发明涉及医疗设备技术领域,具体涉及一种微创血管介入手术机器人导管/导丝旋转机构及推进装置,推进装置包括旋转机构、夹持机构、固定机构和移动机构;旋转机构包括旋转电机、主动带轮、张紧带轮、限位偏心轮和五个滚针轴承组件。夹持机构包括夹持转动轴、夹持爪、夹持爪套、夹持弹簧;固定机构包括:固定指导轨、固定指滑块、固定指滑动底座和电机摩擦轮导向座、弹簧导杆、固定指电机、固定指偏心轮、活动橡胶块和固定橡胶块;通过固定指偏心轮驱动固定指滑动底座运动使活动橡胶块与固定橡胶块夹紧或分开;移动机构驱动旋转机构和夹持机构靠近或
一种微创血管介入手术机器人导管/导丝旋转推进装置.pdf
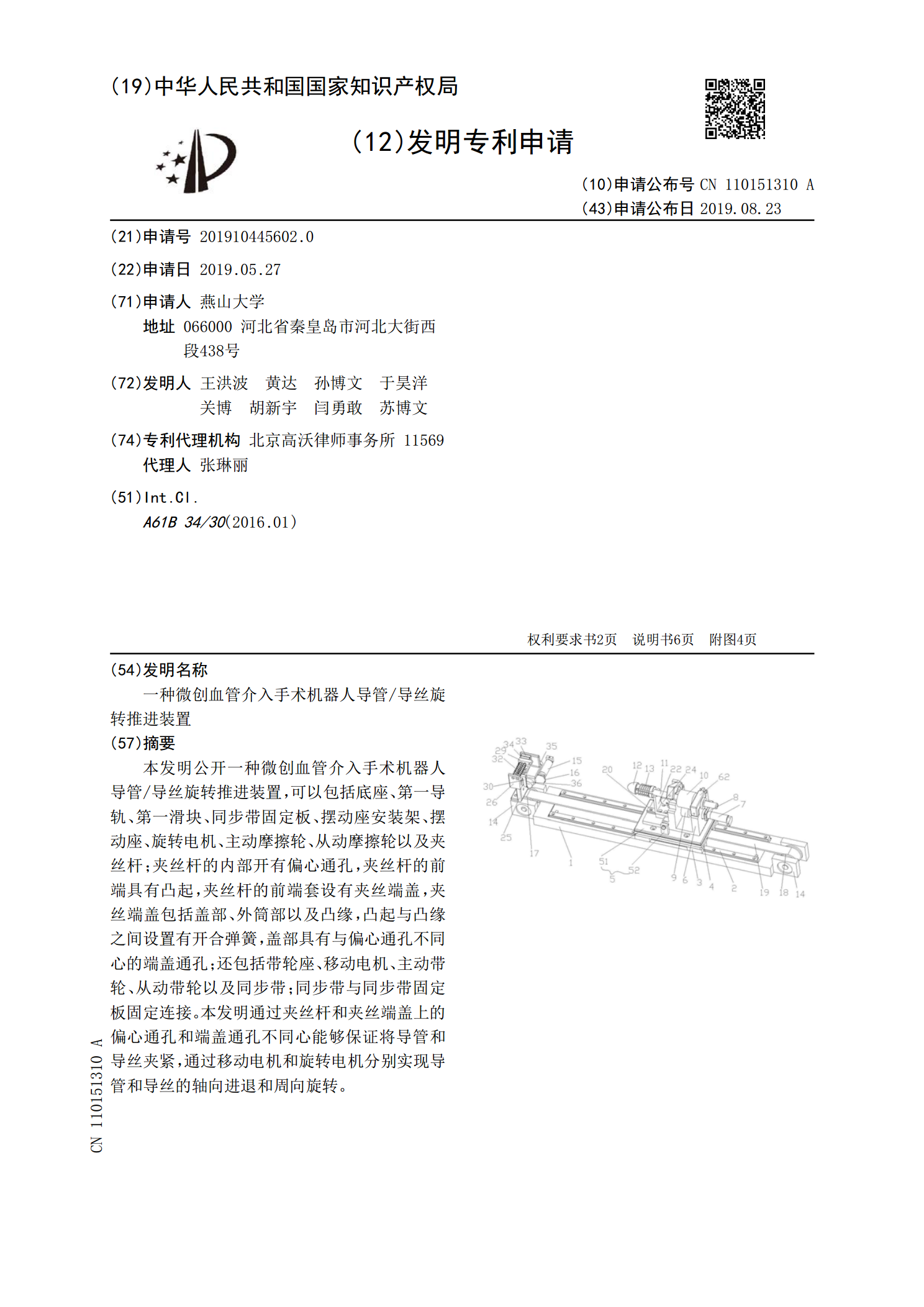
本发明公开一种微创血管介入手术机器人导管/导丝旋转推进装置,可以包括底座、第一导轨、第一滑块、同步带固定板、摆动座安装架、摆动座、旋转电机、主动摩擦轮、从动摩擦轮以及夹丝杆;夹丝杆的内部开有偏心通孔,夹丝杆的前端具有凸起,夹丝杆的前端套设有夹丝端盖,夹丝端盖包括盖部、外筒部以及凸缘,凸起与凸缘之间设置有开合弹簧,盖部具有与偏心通孔不同心的端盖通孔;还包括带轮座、移动电机、主动带轮、从动带轮以及同步带;同步带与同步带固定板固定连接。本发明通过夹丝杆和夹丝端盖上的偏心通孔和端盖通孔不同心能够保证将导管和导丝夹
微创血管介入手术机器人导管和导丝捻旋推进机构.pdf
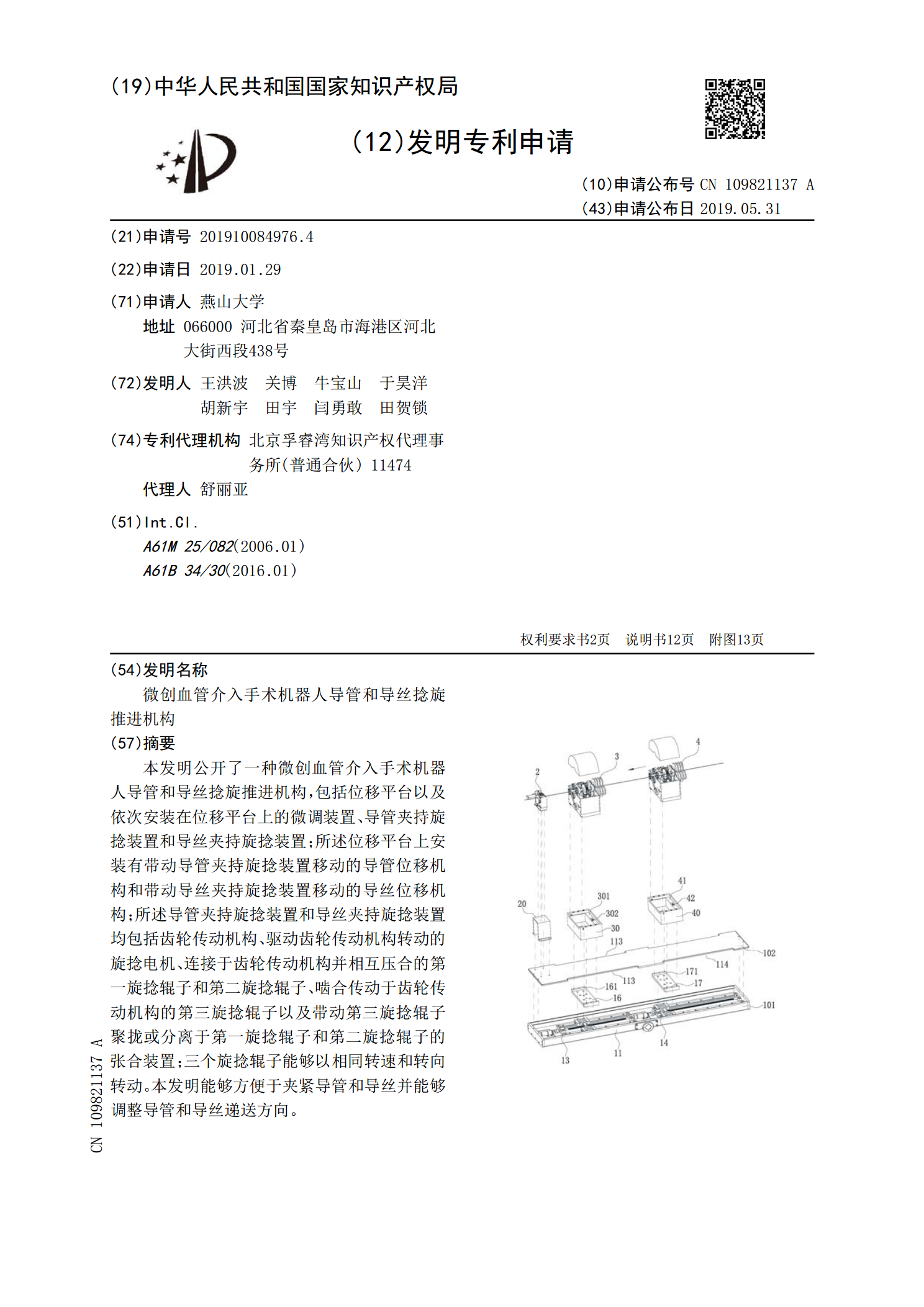
本发明公开了一种微创血管介入手术机器人导管和导丝捻旋推进机构,包括位移平台以及依次安装在位移平台上的微调装置、导管夹持旋捻装置和导丝夹持旋捻装置;所述位移平台上安装有带动导管夹持旋捻装置移动的导管位移机构和带动导丝夹持旋捻装置移动的导丝位移机构;所述导管夹持旋捻装置和导丝夹持旋捻装置均包括齿轮传动机构、驱动齿轮传动机构转动的旋捻电机、连接于齿轮传动机构并相互压合的第一旋捻辊子和第二旋捻辊子、啮合传动于齿轮传动机构的第三旋捻辊子以及带动第三旋捻辊子聚拢或分离于第一旋捻辊子和第二旋捻辊子的张合装置;三个旋捻辊

介入手术机器人导管导丝推进装置.pdf
本发明涉及介入手术机器人导管导丝推进装置,包括壳体,其底部具有敞口,在其内部形成安装空间,其顶部与无菌盒磁性连接;导丝驱动机构、导管驱动机构及检测机构均连接于安装空间内,且均与控制器电性连接;其中检测机构的检测杆可伸出于壳体顶部,无菌盒的上盖开启和关闭状态改变检测杆的伸出量;控制器根据检测杆的伸出量信号控制导丝驱动机构带动无菌盒内的导丝驱动组件推进和旋转导丝,及导管驱动机构带动导管驱动组件推进导管。控制器控制导丝驱动机构、导管驱动机构推动导丝和导管进入患者体内指定位置,达到导管和导丝可同时控制的目的;防止

血管介入手术机器人导丝、导管操控装置.pdf
一种血管介入手术机器人导丝、导管操控装置,包括推送机构、旋捻机构以及控制系统,推送机构包括精调机构及粗调机构,粗调机构包括间隔的两导向管支架、设于两导向管支架之间的同步带轮传动机构以及由同步带轮传动机构带动的第一夹紧装置,精调机构包括固定支架、设于该导向管支架与固定支架之间的移动支架、固定于固定支架上且可带动移动支架相对固定支架往、返运动的丝杆螺母组件以及设于移动支架上的第二夹紧装置,旋捻机构包括设于移动支架上且与第二夹紧装置固定连接以带动第二夹紧装置旋转的齿轮传动机构。本发明中,提高了导丝、导管推送的效