
一种复杂场景的物体轮廓检测方法.pdf

光誉****君哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种复杂场景的物体轮廓检测方法.pdf
本发明公开了一种复杂场景的物体轮廓检测方法。本发明采用一组不同朝向的Gabor滤波器对输入图像进行滤波处理,得到各个朝向下的朝向信息分布图像,并根据各个朝向下的朝向信息分布图像计算各个像素的朝向显著性系数,并将输入图像划分为朝向显著区域和非朝向显著区域,不同特征的纹理条件下使用不同的抑制方式,对于朝向显著的区域,采用各向异性抑制方法来抑制背景信息,对于非朝向显著的区域,采用各向同性抑制处理来抑制背景信息。最终得到抑制后的轮廓图像,经二值化处理即得到目标轮廓图像。本发明的检测方法具有根据外界输入的局部朝向信
一种复杂场景中目标轮廓提取方法.pdf
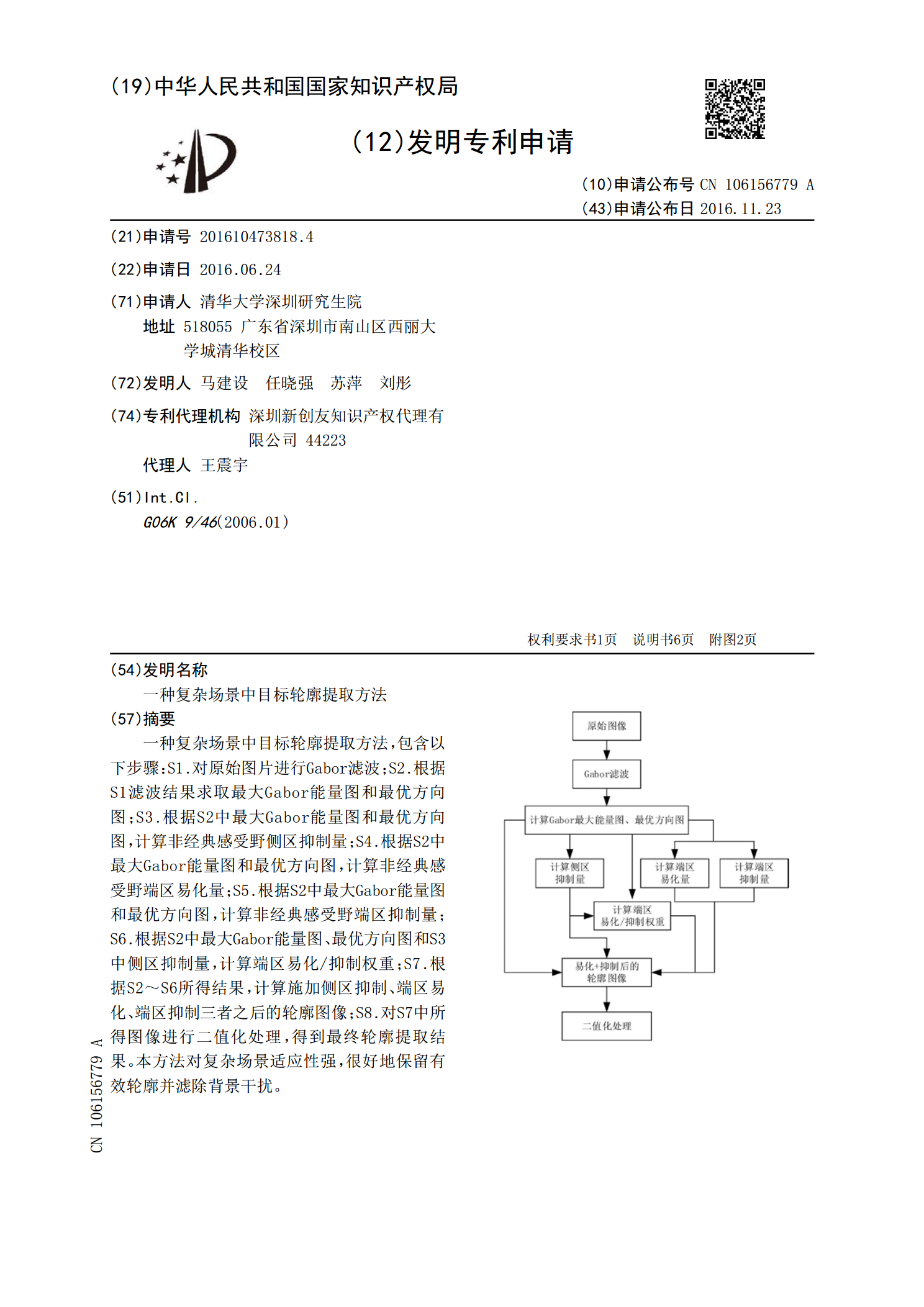
一种复杂场景中目标轮廓提取方法,包含以下步骤:S1.对原始图片进行Gabor滤波;S2.根据S1滤波结果求取最大Gabor能量图和最优方向图;S3.根据S2中最大Gabor能量图和最优方向图,计算非经典感受野侧区抑制量;S4.根据S2中最大Gabor能量图和最优方向图,计算非经典感受野端区易化量;S5.根据S2中最大Gabor能量图和最优方向图,计算非经典感受野端区抑制量;S6.根据S2中最大Gabor能量图、最优方向图和S3中侧区抑制量,计算端区易化/抑制权重;S7.根据S2~S6所得结果,计算施加侧区

一种目标物体轮廓检测方法.pdf
本发明属于计算机视觉技术领域,公开了一种目标物体轮廓检测的方法。本发明将非经典感受野分为端区和侧区,在侧区进行恒定抑制,在端区利用对比度的影响进行选择性作用,同时在计算选择性作用时采用一种自适应的方法,根据每个像素一定邻域内的对比度值来设置门限判定该像素应进行抑制还是易化,另一方面根据非经典感受野滤波器侧区对中心位置处像素的抑制作用以压制纹理及其它局部特征相似的背景信息、进而突出轮廓信息,同时根据非经典感受野滤波器侧区作用来调制端区作用的大小,以尽可能地保留轮廓线的完整性的同时、最大程度地抑制背景干扰。本
一种室内复杂场景的物体姿态估计方法.pdf
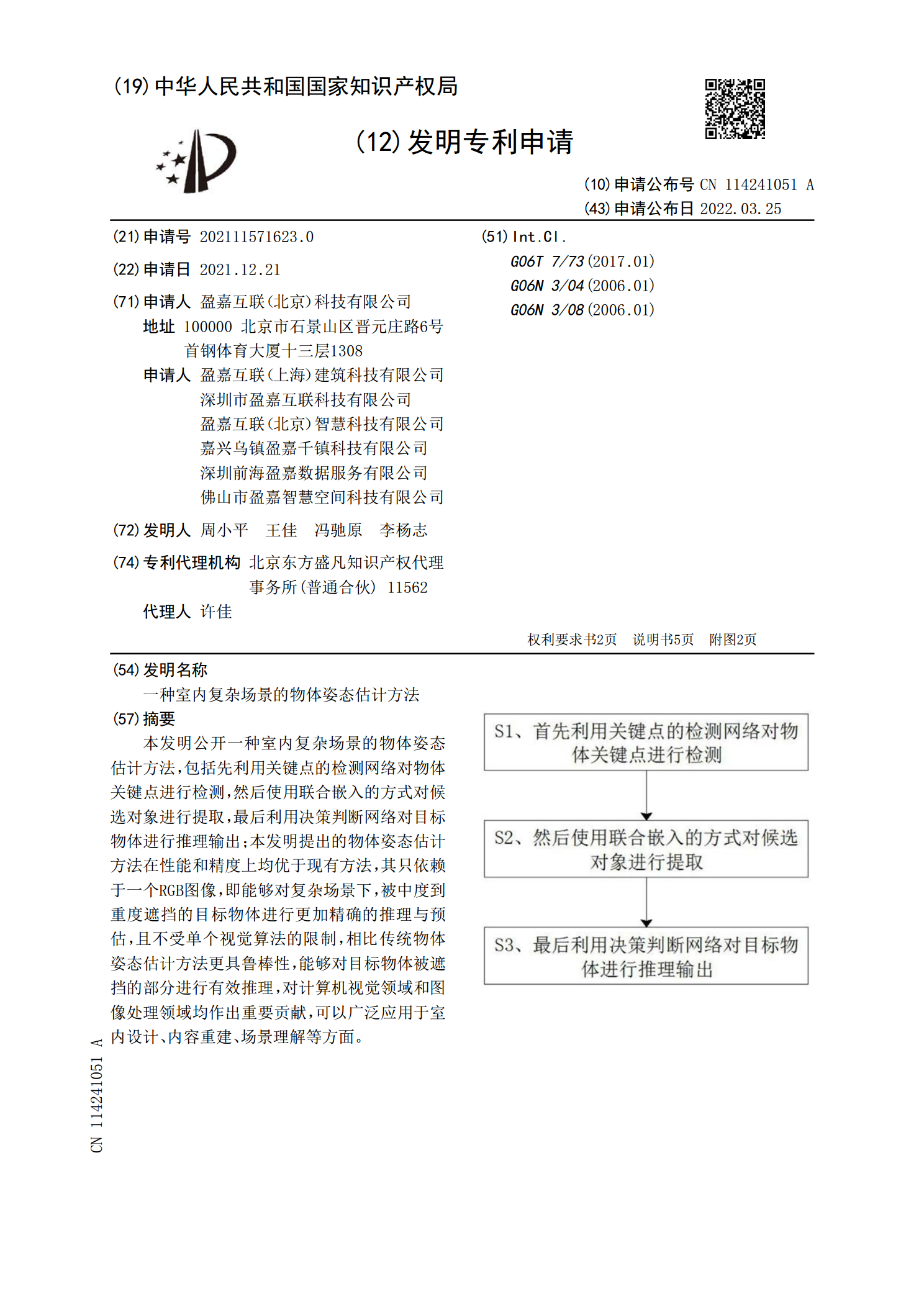
本发明公开一种室内复杂场景的物体姿态估计方法,包括先利用关键点的检测网络对物体关键点进行检测,然后使用联合嵌入的方式对候选对象进行提取,最后利用决策判断网络对目标物体进行推理输出;本发明提出的物体姿态估计方法在性能和精度上均优于现有方法,其只依赖于一个RGB图像,即能够对复杂场景下,被中度到重度遮挡的目标物体进行更加精确的推理与预估,且不受单个视觉算法的限制,相比传统物体姿态估计方法更具鲁棒性,能够对目标物体被遮挡的部分进行有效推理,对计算机视觉领域和图像处理领域均作出重要贡献,可以广泛应用于室内设计、内
一种复杂场景的显著区域检测方法.pdf
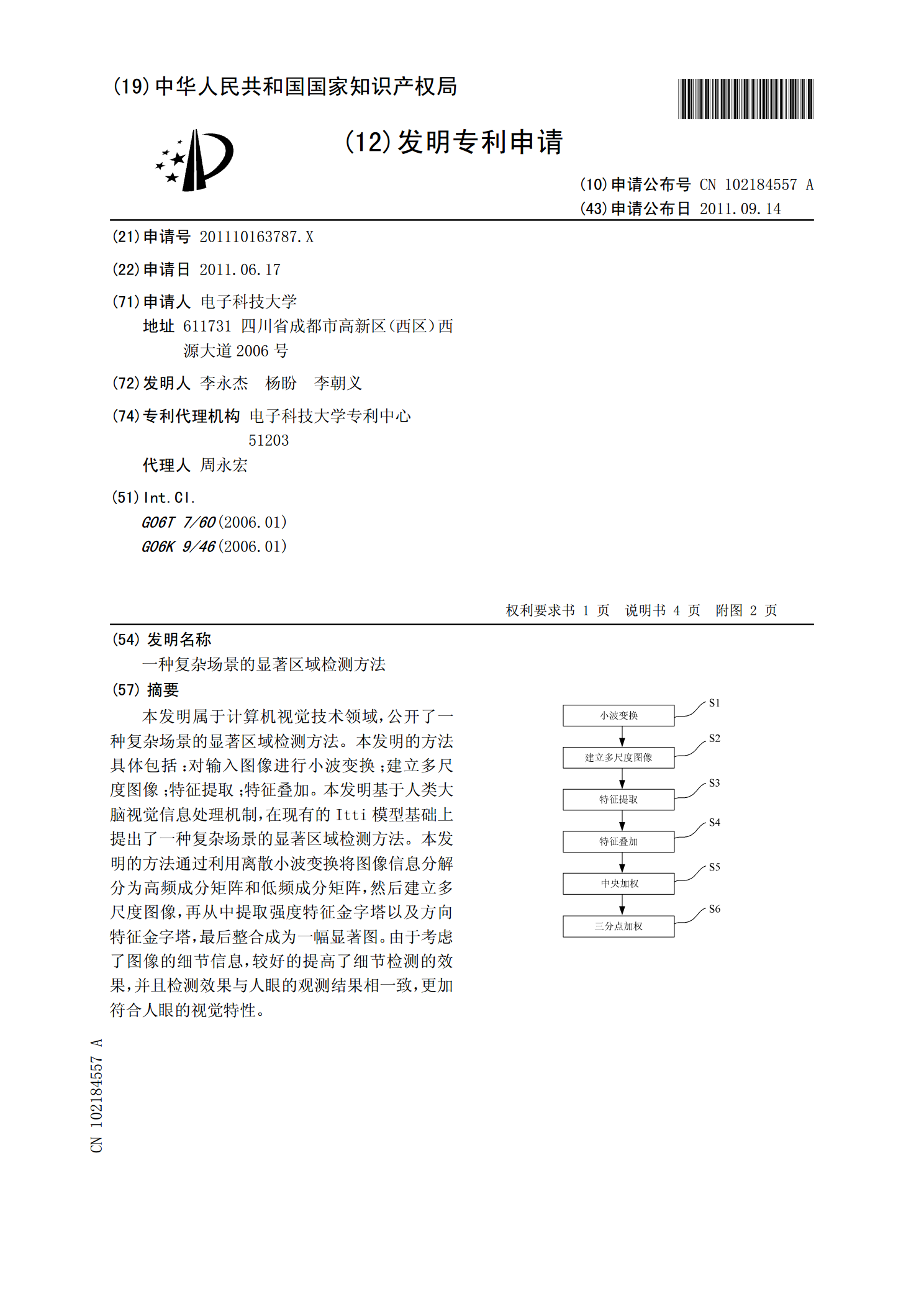
本发明属于计算机视觉技术领域,公开了一种复杂场景的显著区域检测方法。本发明的方法具体包括:对输入图像进行小波变换;建立多尺度图像;特征提取;特征叠加。本发明基于人类大脑视觉信息处理机制,在现有的Itti模型基础上提出了一种复杂场景的显著区域检测方法。本发明的方法通过利用离散小波变换将图像信息分解分为高频成分矩阵和低频成分矩阵,然后建立多尺度图像,再从中提取强度特征金字塔以及方向特征金字塔,最后整合成为一幅显著图。由于考虑了图像的细节信息,较好的提高了细节检测的效果,并且检测效果与人眼的观测结果相一致,更加