
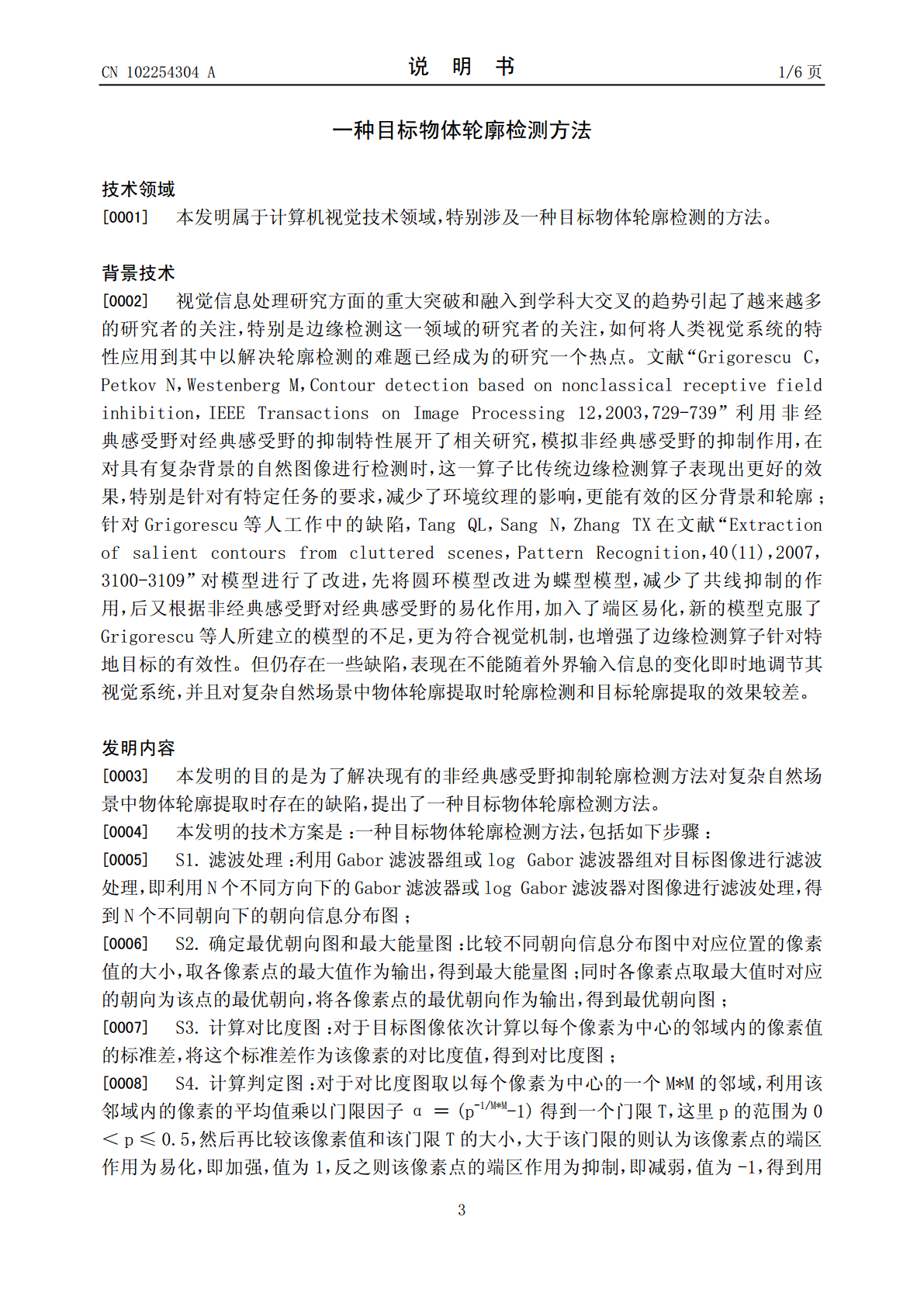
一种目标物体轮廓检测方法.pdf

努力****向丝


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种目标物体轮廓检测方法.pdf
本发明属于计算机视觉技术领域,公开了一种目标物体轮廓检测的方法。本发明将非经典感受野分为端区和侧区,在侧区进行恒定抑制,在端区利用对比度的影响进行选择性作用,同时在计算选择性作用时采用一种自适应的方法,根据每个像素一定邻域内的对比度值来设置门限判定该像素应进行抑制还是易化,另一方面根据非经典感受野滤波器侧区对中心位置处像素的抑制作用以压制纹理及其它局部特征相似的背景信息、进而突出轮廓信息,同时根据非经典感受野滤波器侧区作用来调制端区作用的大小,以尽可能地保留轮廓线的完整性的同时、最大程度地抑制背景干扰。本
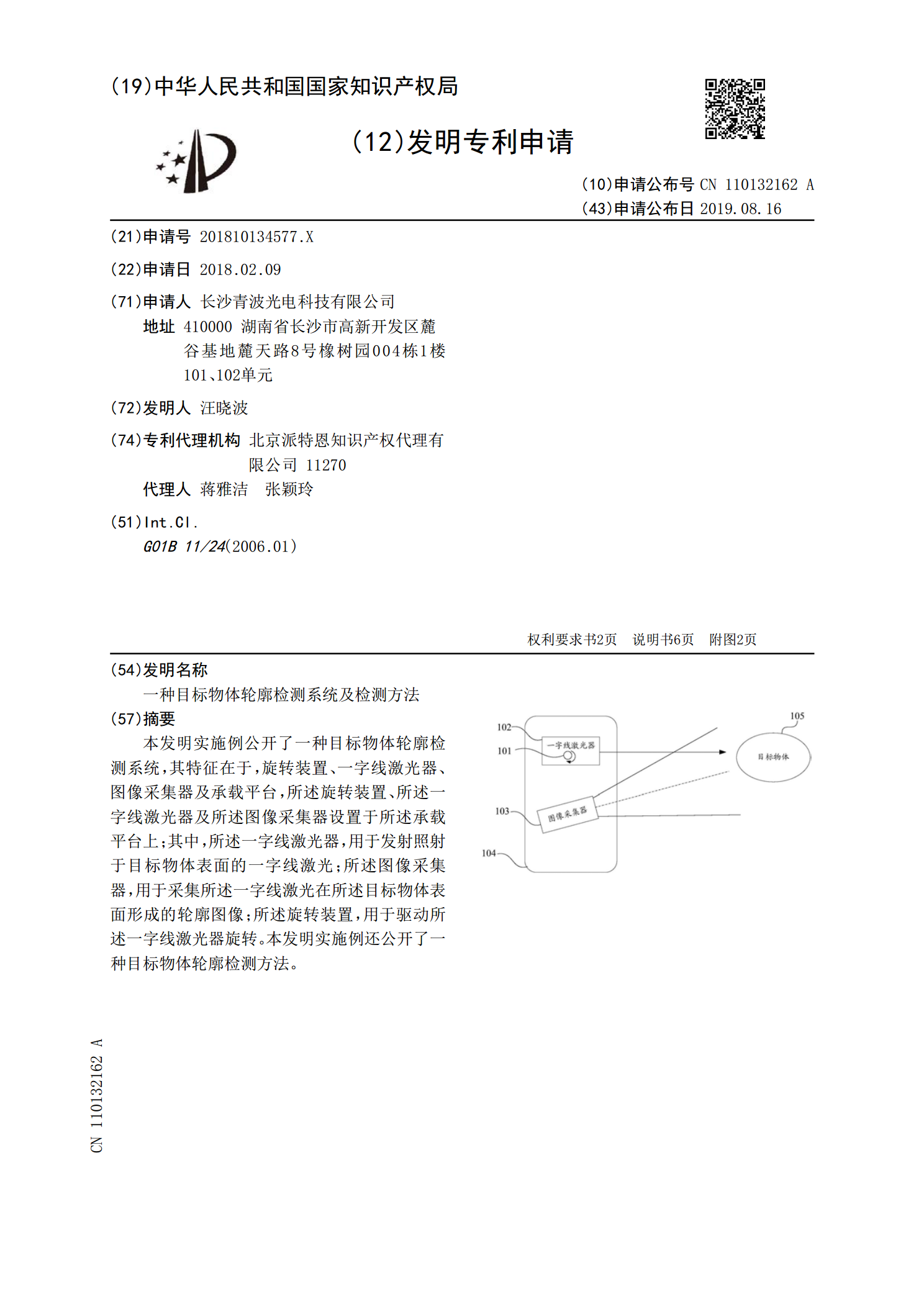
一种目标物体轮廓检测系统及检测方法.pdf
本发明实施例公开了一种目标物体轮廓检测系统,其特征在于,旋转装置、一字线激光器、图像采集器及承载平台,所述旋转装置、所述一字线激光器及所述图像采集器设置于所述承载平台上;其中,所述一字线激光器,用于发射照射于目标物体表面的一字线激光;所述图像采集器,用于采集所述一字线激光在所述目标物体表面形成的轮廓图像;所述旋转装置,用于驱动所述一字线激光器旋转。本发明实施例还公开了一种目标物体轮廓检测方法。

一种基于多特征的目标物体轮廓检测方法.pdf
本发明属于计算机视觉技术领域,公开了一种基于多特征的目标物体轮廓检测方法。包括:滤波处理;提取图像的局部特征;计算各个特征下的抑制权重;制取抑制后的轮廓图像;二值化处理。本发明采用一组不同朝向的滤波器对输入图像进行滤波处理,得到各个朝向下的朝向信息分布图像;再分别提取图像的局部朝向,亮度和对比度特征,在每个特征下分别计算非经典感受野对中心像素点的抑制权重,最后合并各个特征下的抑制权重得到最终的抑制权重。根据每个像素点的抑制权重来调节对应非经典感受野区域内像素对其的抑制强度,得到抑制后的轮廓图像。本发明的方

一种模拟视觉机制的图像目标物体轮廓检测方法.pdf
该发明属于生物信息技术中采用模拟视觉机制对图像目标物轮廓进行检测的技术,包括采用大、小两个尺度参数及多个朝向进行Gabor滤波,确定非经典感受野相应滤波器的方位及其侧区和端区对中心像素的抑制量、并制取抑制后的图像,再经常规二值化处理即得目标轮廓图。该发明首先用Gabor滤波器组在两个不同尺度参数下、分别对图像在不同方位进行滤波,得到其高频信息分布图和低频信息分布图,再利用非经典感受野滤波器对其中的纹理等非轮廓信息进行抑制处理等。因而具有随外界输入信息变化的自适应能力强,可有效提高轮廓检测系统从复杂场景中迅
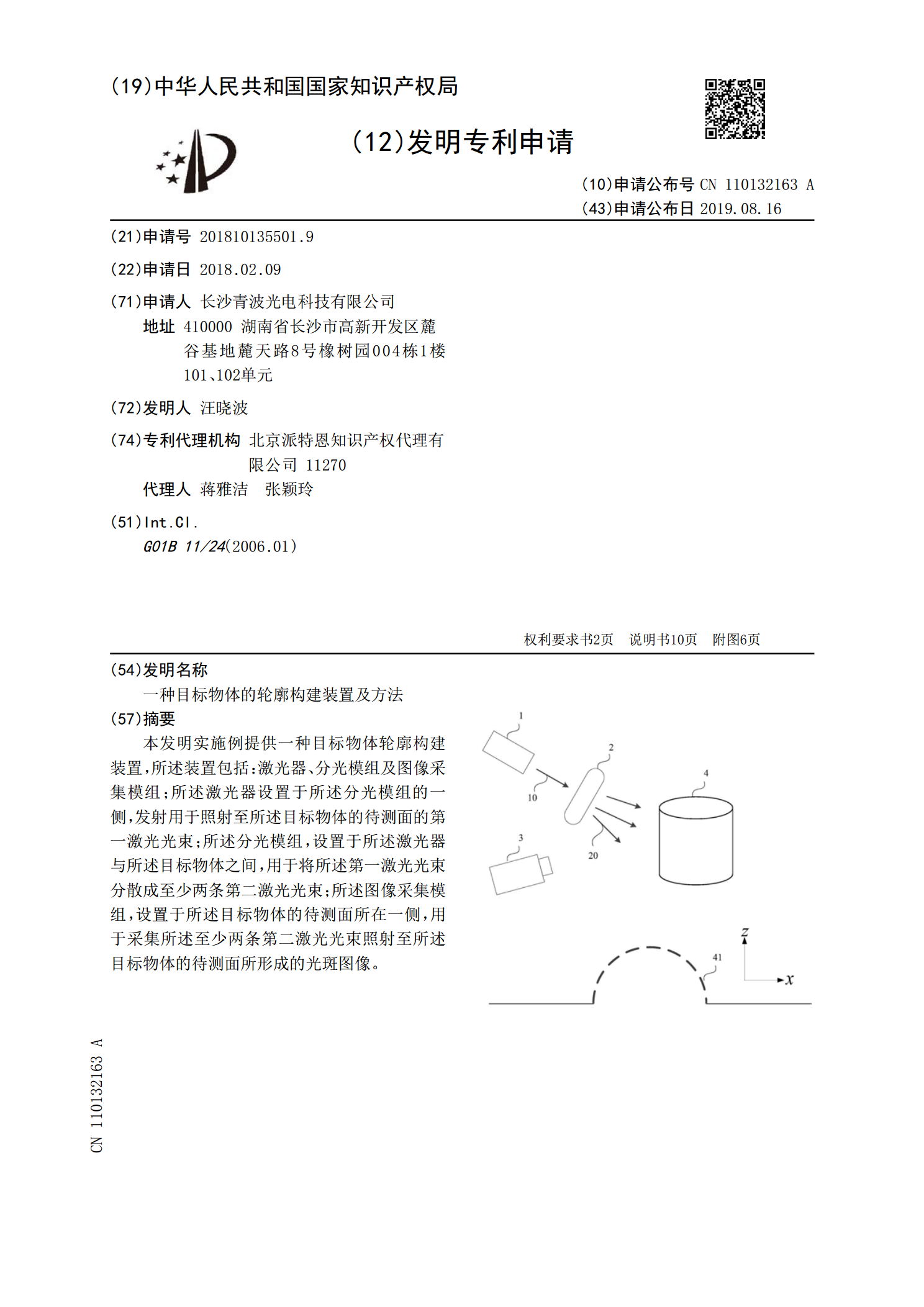
一种目标物体的轮廓构建装置及方法.pdf
本发明实施例提供一种目标物体轮廓构建装置,所述装置包括:激光器、分光模组及图像采集模组;所述激光器设置于所述分光模组的一侧,发射用于照射至所述目标物体的待测面的第一激光光束;所述分光模组,设置于所述激光器与所述目标物体之间,用于将所述第一激光光束分散成至少两条第二激光光束;所述图像采集模组,设置于所述目标物体的待测面所在一侧,用于采集所述至少两条第二激光光束照射至所述目标物体的待测面所形成的光斑图像。