
一种复杂场景中目标轮廓提取方法.pdf

韶敏****ab

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种复杂场景中目标轮廓提取方法.pdf
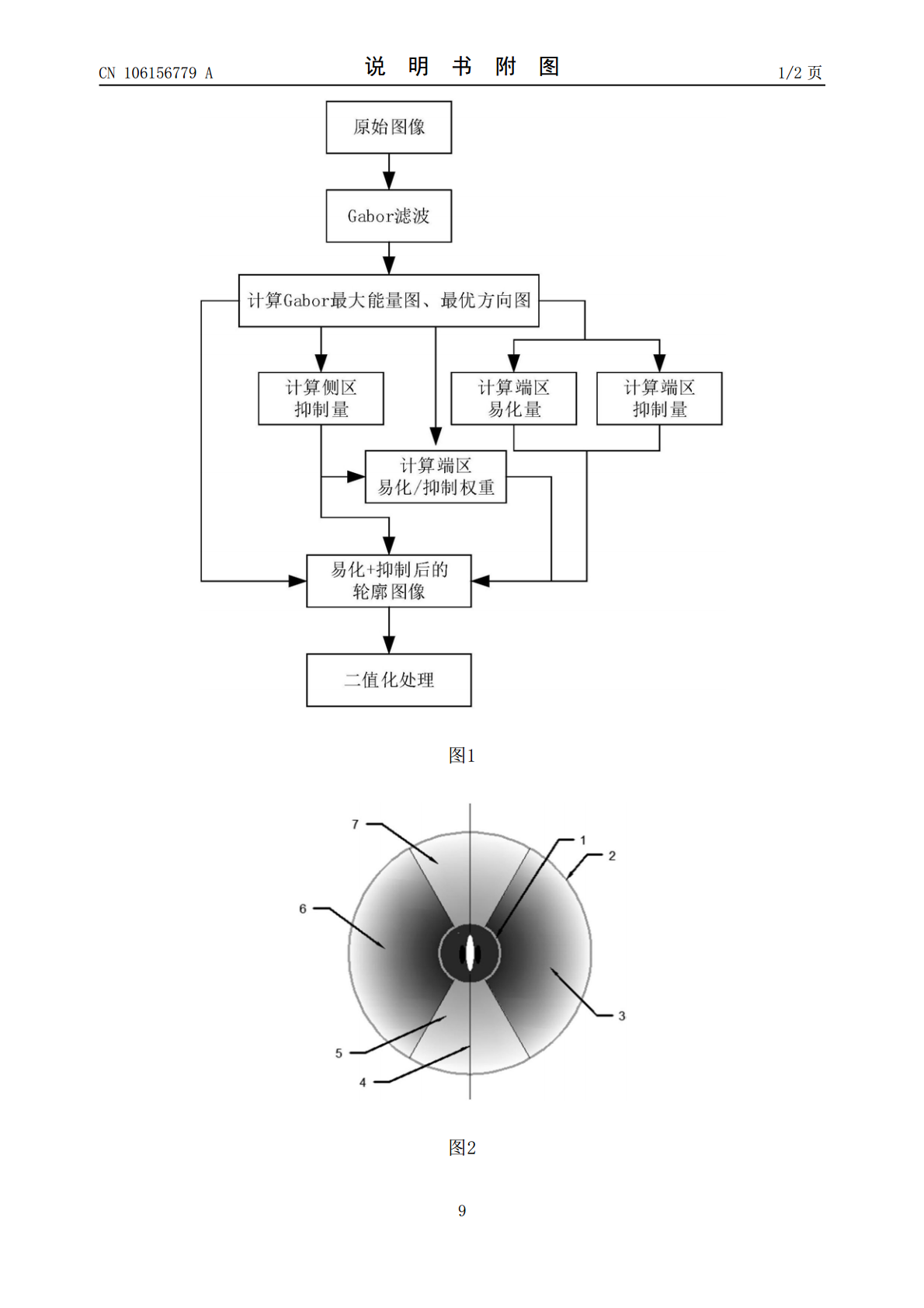
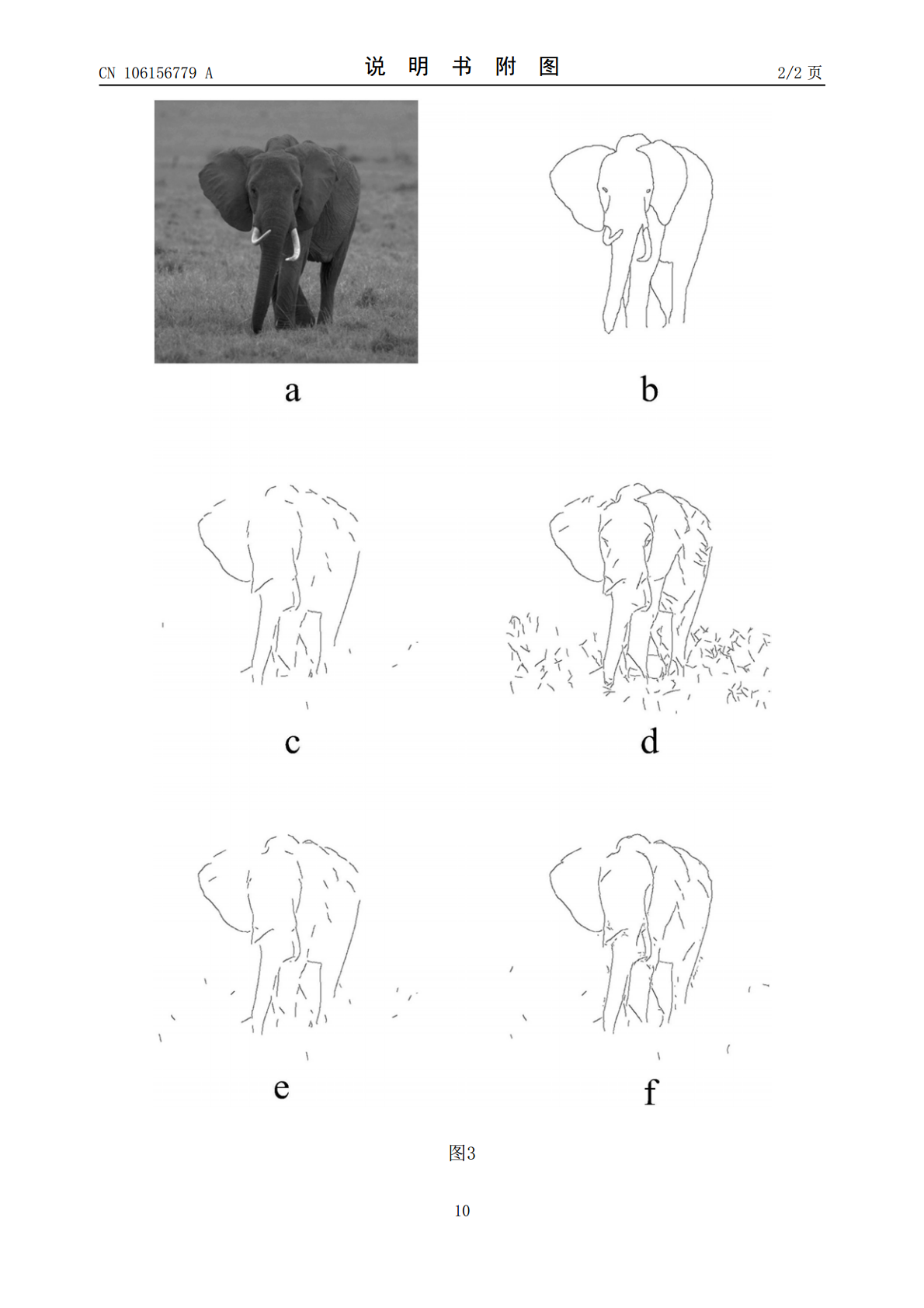
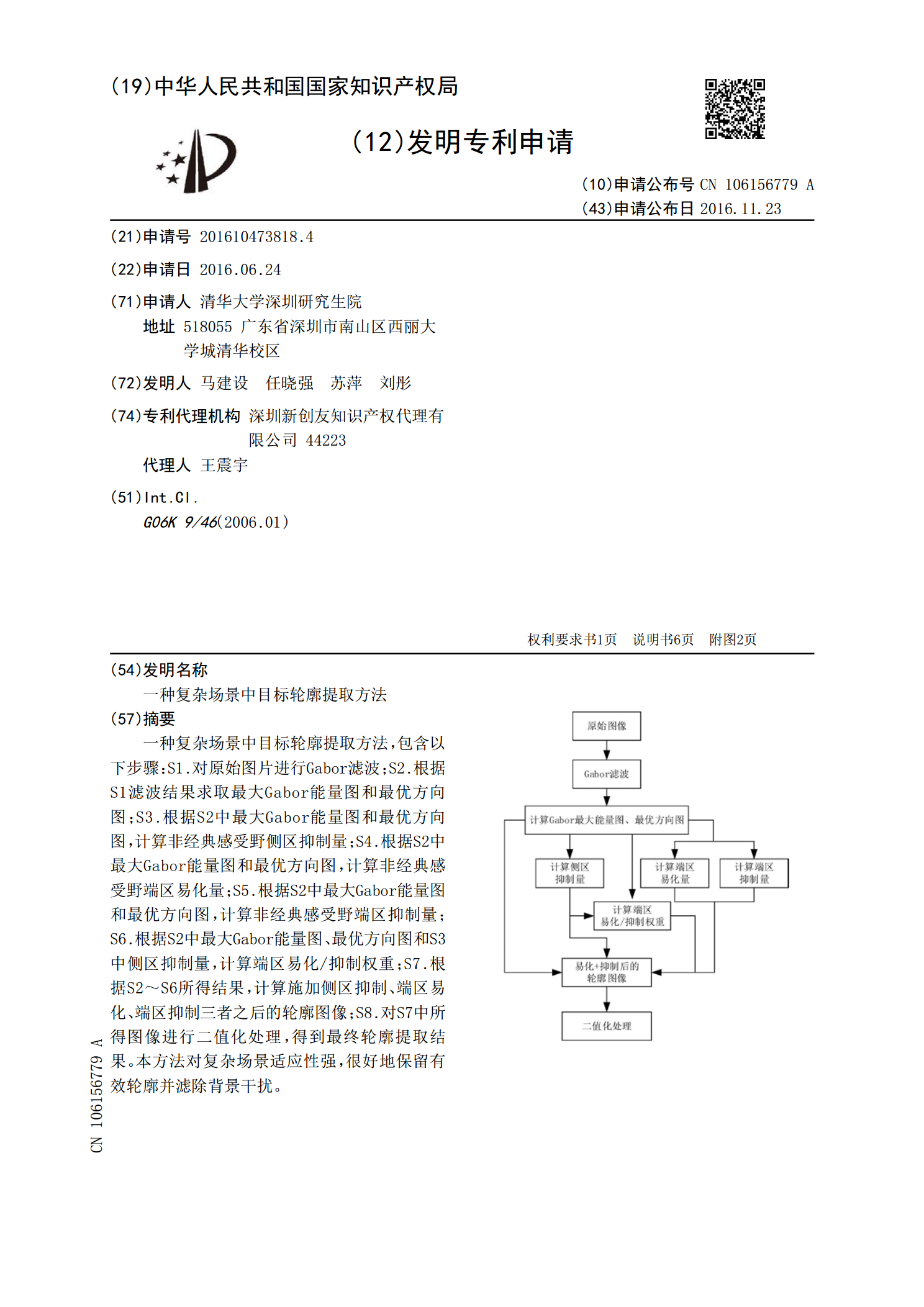
一种复杂场景中目标轮廓提取方法,包含以下步骤:S1.对原始图片进行Gabor滤波;S2.根据S1滤波结果求取最大Gabor能量图和最优方向图;S3.根据S2中最大Gabor能量图和最优方向图,计算非经典感受野侧区抑制量;S4.根据S2中最大Gabor能量图和最优方向图,计算非经典感受野端区易化量;S5.根据S2中最大Gabor能量图和最优方向图,计算非经典感受野端区抑制量;S6.根据S2中最大Gabor能量图、最优方向图和S3中侧区抑制量,计算端区易化/抑制权重;S7.根据S2~S6所得结果,计算施加侧区

一种复杂场景的物体轮廓检测方法.pdf
本发明公开了一种复杂场景的物体轮廓检测方法。本发明采用一组不同朝向的Gabor滤波器对输入图像进行滤波处理,得到各个朝向下的朝向信息分布图像,并根据各个朝向下的朝向信息分布图像计算各个像素的朝向显著性系数,并将输入图像划分为朝向显著区域和非朝向显著区域,不同特征的纹理条件下使用不同的抑制方式,对于朝向显著的区域,采用各向异性抑制方法来抑制背景信息,对于非朝向显著的区域,采用各向同性抑制处理来抑制背景信息。最终得到抑制后的轮廓图像,经二值化处理即得到目标轮廓图像。本发明的检测方法具有根据外界输入的局部朝向信

一种复杂场景底层视觉信息提取方法.pdf
本发明属于场景视觉认知领域,特别涉及一种复杂场景底层视觉信息提取方法。为了解决复杂场景的底层特征值提取问题。本发明引入改进的卷积神经网络结构,利用四种卷积滤波器,组成多深度分析集对场景图像进行图像语义分割;引入特征卷积滤波器筛选提取复杂场景的区域语义,再对提取结果使用转置卷积进行场景图像在语义上的区域分割;场景语义的区域分割结果作为激活偏置代入最后的底层视觉信息特征值提取网络,可以确保各种类型的场景细节均不会丢失。经过场景区域语义分割后,本发明能够很好地提取出认知实验所需的场景底层信息特征值,能较好地保留

一种复杂背景场景中运动目标检测方法.pdf
在对图像进行运动目标检测时,背景越复杂,检测难度越高,获得的检测结果准确性越低,本发明提出一种复杂背景场景中运动目标检测方法,该方法使用自适应高斯混合模型对视频帧图像进行检测,获得包含前景目标和大量噪声的检测图像;再通过训练BP神经网络,采用训练好的BP神经网络对检测图像的各个部分进行判别,排除非前景目标区域;最后采用中值滤波方法对保留的前景目标区域中的孤立噪声点进行进一步修正,获得最后的检测图像。本发明提出的方法可以获得获准确度高、噪声小、边缘明确的前景目标,同时具有鲁棒性高、训练速度快等特点。

轮廓提取装置及轮廓提取方法.pdf
一种轮廓提取装置及轮廓提取方法,其根据摄像机拍摄的薄片材料的图像提取轮廓点,求出表示薄片材料的外形的外侧轮廓、及位于其内部的内侧轮廓。将内外轮廓之间的区域作为褶皱,求出所求的褶皱的形状的长径与短径之比,将该比较大的褶皱作为强褶皱,将该比较小的褶皱作为弱褶皱。将裁剪的工件根据褶皱的分级分配到薄片材料上。能够求出褶皱的形状,并且能够有效利用褶皱的部分。