
一种室内复杂场景的物体姿态估计方法.pdf

森林****来了


1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种室内复杂场景的物体姿态估计方法.pdf
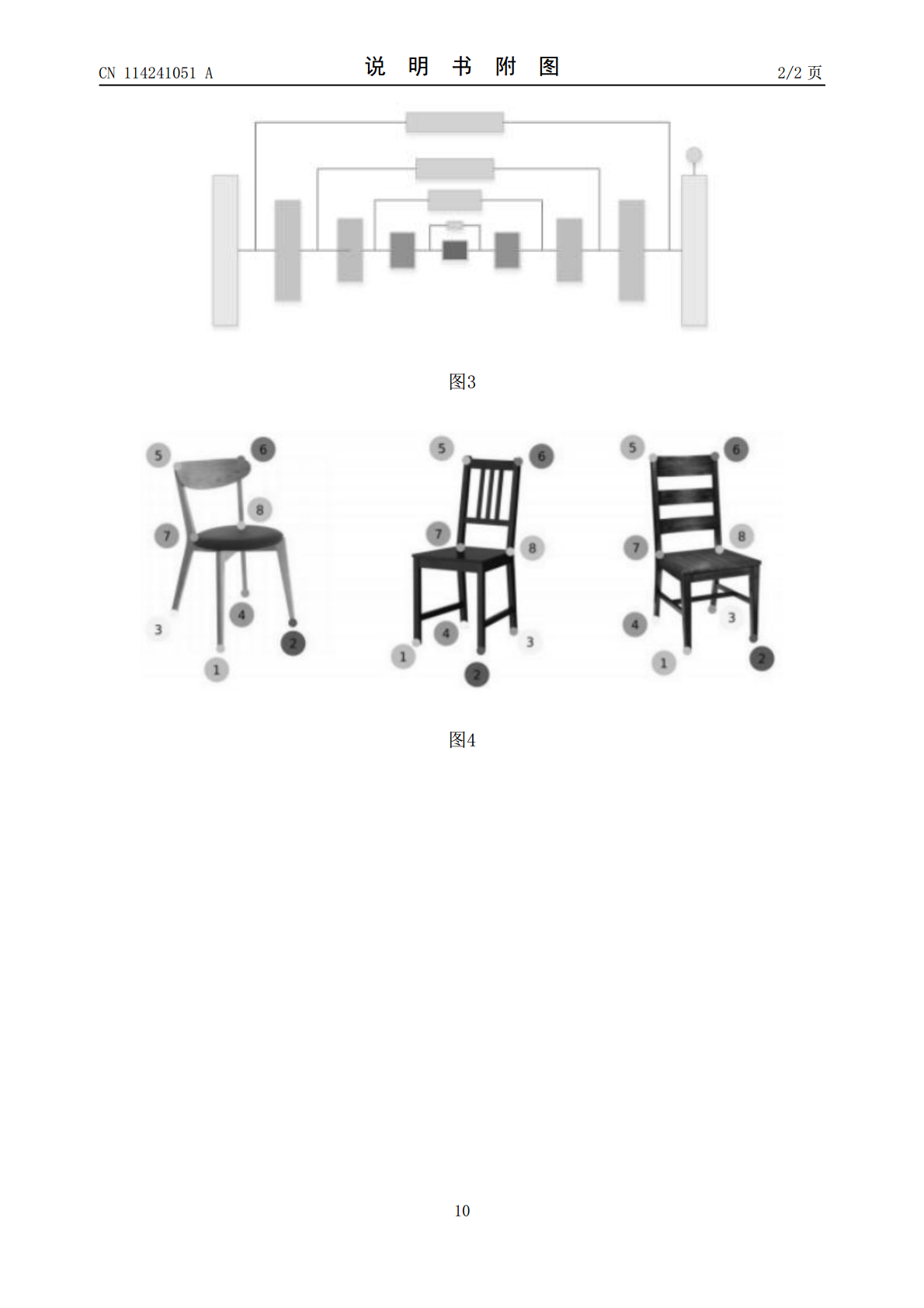
本发明公开一种室内复杂场景的物体姿态估计方法,包括先利用关键点的检测网络对物体关键点进行检测,然后使用联合嵌入的方式对候选对象进行提取,最后利用决策判断网络对目标物体进行推理输出;本发明提出的物体姿态估计方法在性能和精度上均优于现有方法,其只依赖于一个RGB图像,即能够对复杂场景下,被中度到重度遮挡的目标物体进行更加精确的推理与预估,且不受单个视觉算法的限制,相比传统物体姿态估计方法更具鲁棒性,能够对目标物体被遮挡的部分进行有效推理,对计算机视觉领域和图像处理领域均作出重要贡献,可以广泛应用于室内设计、内

复杂场景下的人体姿态估计与动作识别研究.docx
复杂场景下的人体姿态估计与动作识别研究复杂场景下的人体姿态估计与动作识别研究摘要:随着计算机视觉和模式识别技术的快速发展,人体姿态估计与动作识别在许多领域中变得越来越重要。然而,由于复杂场景的挑战,如遮挡、光照变化和背景噪声,传统的方法在这些情况下往往无法准确地估计人体的姿态和识别动作。为了解决这些问题,本文将综述当前在复杂场景下人体姿态估计和动作识别方面取得的最新研究进展,并讨论其中的挑战和未来的发展方向。1.引言人体姿态估计和动作识别的研究在计算机视觉和机器学习领域具有广泛的应用。它们在视频监控、人机

一种复杂场景的物体轮廓检测方法.pdf
本发明公开了一种复杂场景的物体轮廓检测方法。本发明采用一组不同朝向的Gabor滤波器对输入图像进行滤波处理,得到各个朝向下的朝向信息分布图像,并根据各个朝向下的朝向信息分布图像计算各个像素的朝向显著性系数,并将输入图像划分为朝向显著区域和非朝向显著区域,不同特征的纹理条件下使用不同的抑制方式,对于朝向显著的区域,采用各向异性抑制方法来抑制背景信息,对于非朝向显著的区域,采用各向同性抑制处理来抑制背景信息。最终得到抑制后的轮廓图像,经二值化处理即得到目标轮廓图像。本发明的检测方法具有根据外界输入的局部朝向信

复杂场景下的人体姿态估计与动作识别研究的开题报告.docx
复杂场景下的人体姿态估计与动作识别研究的开题报告摘要:人体姿态估计和动作识别在计算机视觉中具有重要的应用,包括运动分析、动画制作、智能监控等领域。本文将研究在复杂场景下的人体姿态估计和动作识别方法,包括基于深度学习的方法和基于传统计算机视觉算法的方法,并且讨论这些方法在实际场景中的应用和限制。关键词:人体姿态估计、动作识别、深度学习、计算机视觉、传统算法一、研究背景姿态估计和动作识别是计算机视觉领域中的重要研究课题,是计算机对人类行为感知和理解的重要手段之一。人体姿态估计旨在根据给定的人体图像或视频,推断
一种复杂场景下的绘画物体识别与提取方法.pdf
本发明涉及图像识别与分割技术领域,具体公开了一种复杂场景下的绘画物体识别与提取方法,包括以下步骤:步骤1:构建检测与识别模型,并利用已有物体框和物体类别标注的图像集训练该模型;步骤2:采集包含用户绘画内容的场景图像;步骤3:利用训练完的检测与识别模型在图像中定位出绘画区域,并识别出绘画物体;步骤4:选出绘画区域,利用图像分割技术提取出绘画物体轮廓区域,该方法能应用在儿童绘画教学领域,增加绘画过程的智能互动性,提升绘画体验。