
翻转式机械手.pdf

宜然****找我


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

翻转式机械手.pdf
本发明公开了一种翻转式机械手,包括主动臂、从动臂和一对可同步翻转的夹爪,所述主动臂上装设有用于驱动主动臂摆动的摆动组件,所述主动臂后端与从动臂后端通过齿轮副连接,所述一对可同步翻转的夹爪分设于主动臂和从动臂上,至少一件夹爪上装设有可驱动夹爪翻转的旋转驱动件。该翻转式机械手具有结构简单紧凑、成本低廉、适用性强的优点。

一种翻转式机械手.pdf
本发明涉及机械手设备技术领域,具体涉及一种翻转式机械手,包括基座组件、分别设置于所述基座组件的正向驱动机构和反向驱动机构,所述基座组件上还设置有正向翻转机构和反向翻转机构,所述正向驱动机构驱动所述正向翻转机构翻转,所述反向驱动机构驱动所述反向翻转机构翻转;所述正向翻转机构包括正旋齿轮、与所述正旋齿轮连接的第一翻转板安装杆以及与所述第一翻转板安装杆连接的正向翻转板;所述反向翻转机构包括反旋齿轮、与第所述反旋齿轮连接的第二翻转板安装杆以及与所述第二翻转板安装杆连接的反向翻转板。本发明的机械手利用正向翻转机构和
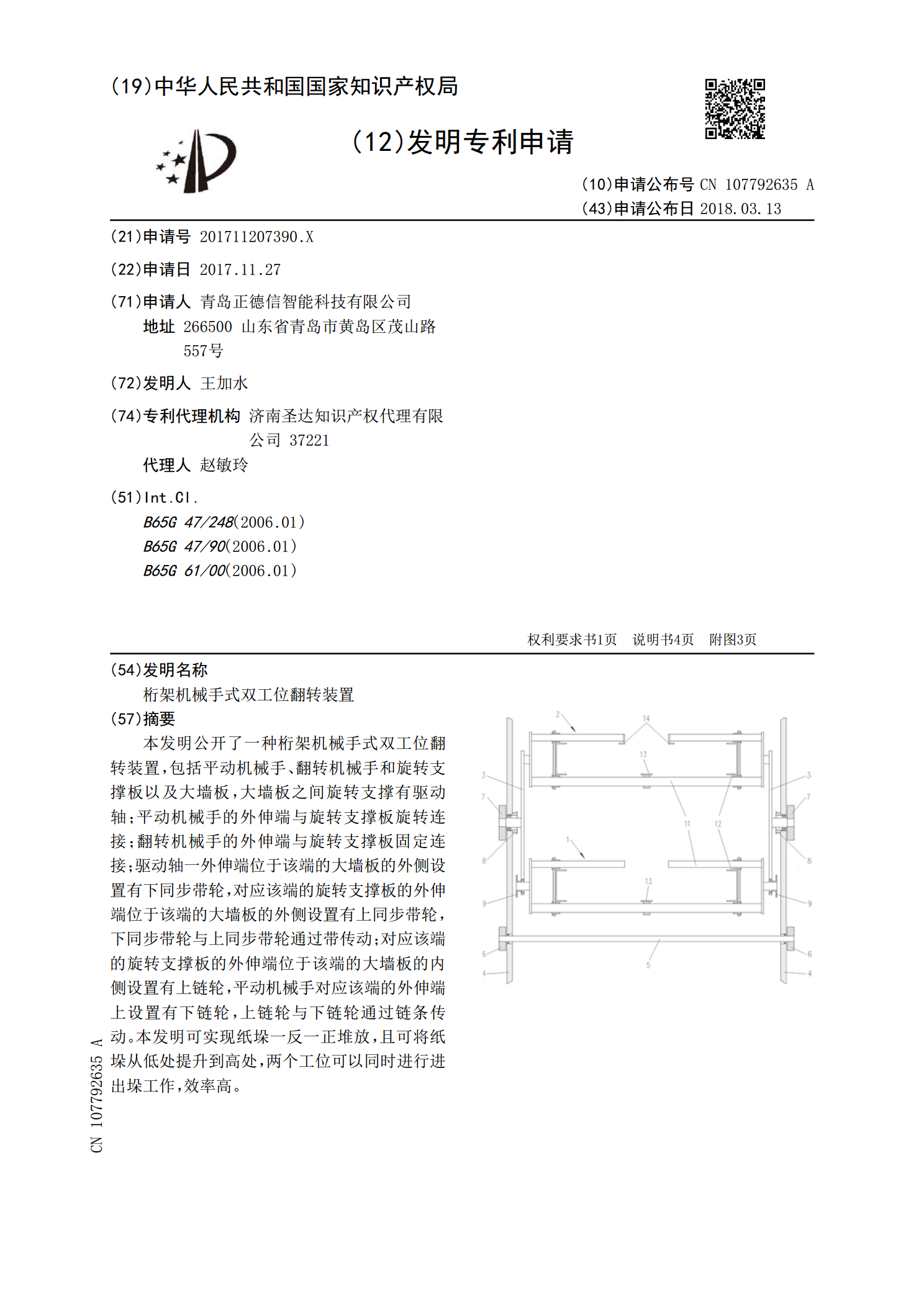
桁架机械手式双工位翻转装置.pdf
本发明公开了一种桁架机械手式双工位翻转装置,包括平动机械手、翻转机械手和旋转支撑板以及大墙板,大墙板之间旋转支撑有驱动轴;平动机械手的外伸端与旋转支撑板旋转连接;翻转机械手的外伸端与旋转支撑板固定连接;驱动轴一外伸端位于该端的大墙板的外侧设置有下同步带轮,对应该端的旋转支撑板的外伸端位于该端的大墙板的外侧设置有上同步带轮,下同步带轮与上同步带轮通过带传动;对应该端的旋转支撑板的外伸端位于该端的大墙板的内侧设置有上链轮,平动机械手对应该端的外伸端上设置有下链轮,上链轮与下链轮通过链条传动。本发明可实现纸垛一

轮胎硫化机翻转式装胎机械手.pdf
本发明公开了一种轮胎硫化机翻转式装胎机械手,包括基于竖直机架设置的升降机构、翻转装置和抓胎器运行装置,所述升降机构为于竖直机架正面设立的升降液压缸,所述翻转装置包括构成“L”型的转动臂和摆动臂,所述抓胎器运行装置包括沿转动臂和摆动臂外侧行走的钢丝绳,抓胎器于钢丝绳上垂吊,所述转动臂和摆动臂的端头设有定位抓胎器的抓放胎机构;所述升降液压缸的升降、转动臂和摆动臂的翻转以及钢丝绳带动抓胎器的移动有机结合,能够完成抓胎器于抓胎位对轮胎的抓取和于卸胎位卸胎,并从卸胎位返回抓胎位的不断循环过程,相比现用机械手笨重的体

翻转前置机械手.pdf
翻转前置机械手,包括机构基座、变频电机和涡轮减速机,连接有涡轮减速机的变频电机固定在机构基座上,涡轮减速机上连接有翻转主轴,旋转编码器设置在翻转主轴的一端,其特征在于:所述的翻转主轴上设有同步夹紧夹爪机构,并用胀紧套固定,变频电机通过涡轮减速机,带动翻转主轴转动。本发明结构,由于采用了前置机械手结构减短了叉齿长度。增加了叉齿的强度、减少了钢材的浪费及机械加工的废料,降低了制造成本。同步齿轮齿条机构,使两组夹爪同步做张开收紧动作,夹爪固定在直线滑块上,滑块平稳的在导轨上滑动,使得夹爪的夹紧放松动作平滑。