
一种翻转式机械手.pdf

纪阳****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种翻转式机械手.pdf
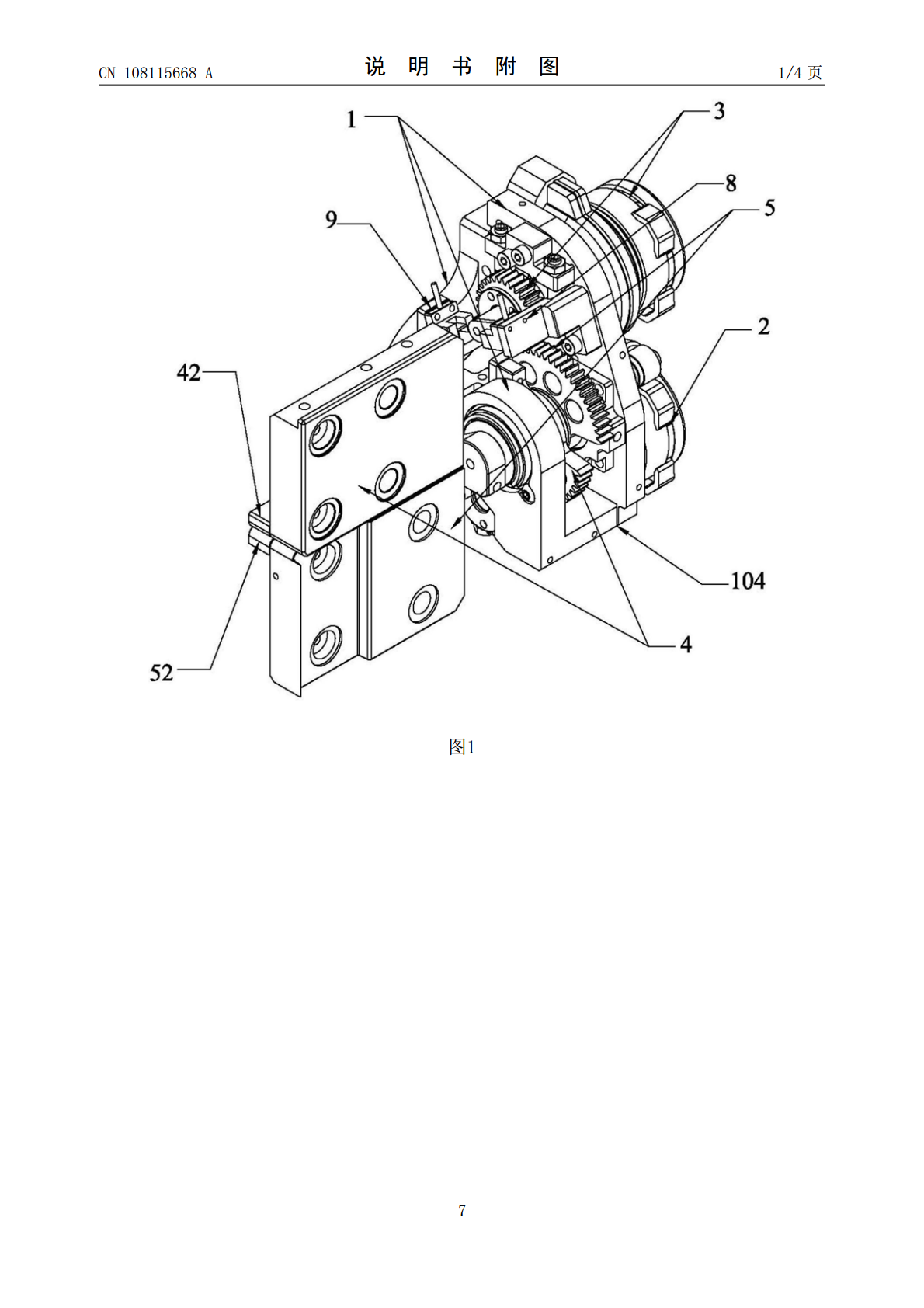
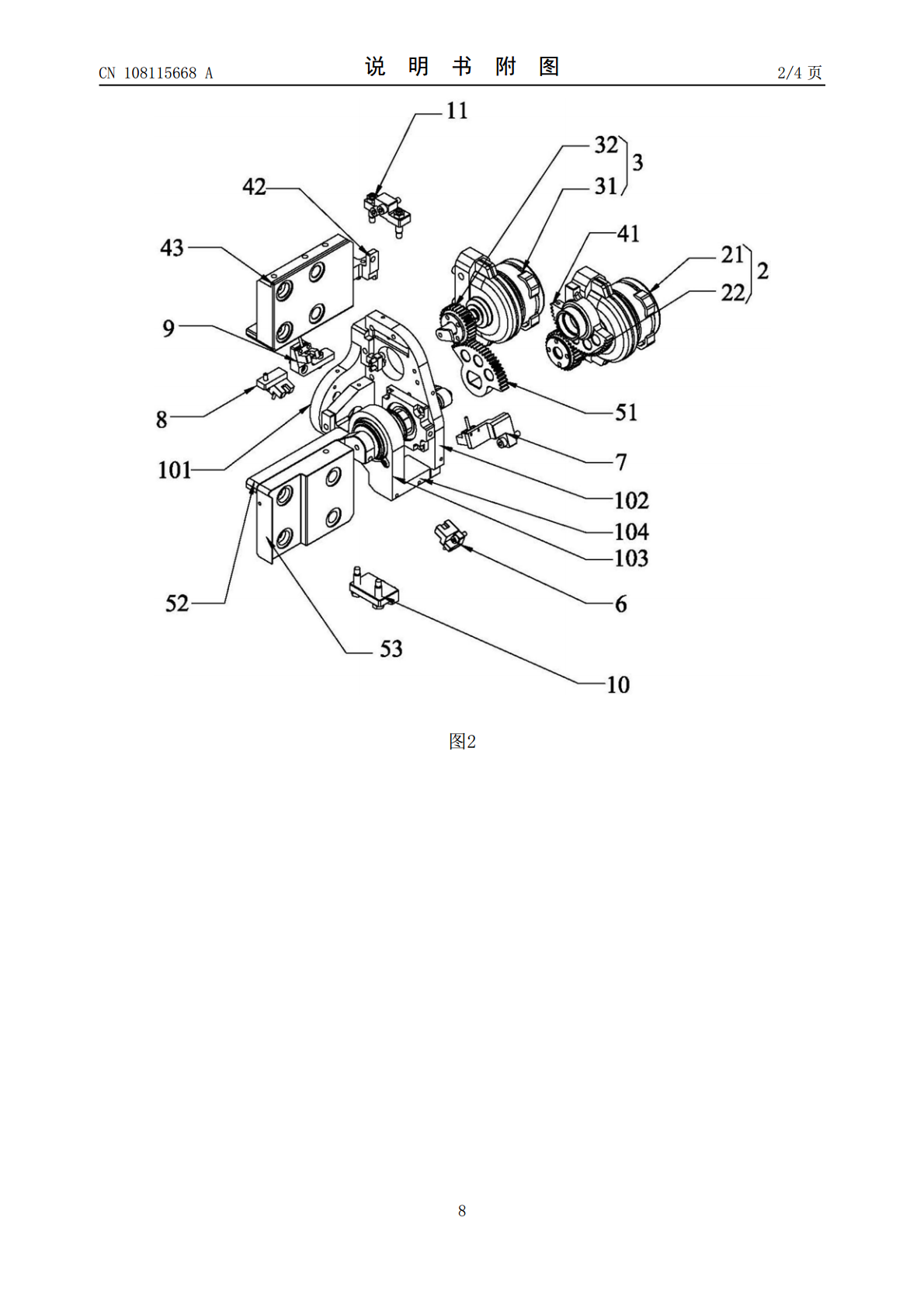
本发明涉及机械手设备技术领域,具体涉及一种翻转式机械手,包括基座组件、分别设置于所述基座组件的正向驱动机构和反向驱动机构,所述基座组件上还设置有正向翻转机构和反向翻转机构,所述正向驱动机构驱动所述正向翻转机构翻转,所述反向驱动机构驱动所述反向翻转机构翻转;所述正向翻转机构包括正旋齿轮、与所述正旋齿轮连接的第一翻转板安装杆以及与所述第一翻转板安装杆连接的正向翻转板;所述反向翻转机构包括反旋齿轮、与第所述反旋齿轮连接的第二翻转板安装杆以及与所述第二翻转板安装杆连接的反向翻转板。本发明的机械手利用正向翻转机构和

翻转式机械手.pdf
本发明公开了一种翻转式机械手,包括主动臂、从动臂和一对可同步翻转的夹爪,所述主动臂上装设有用于驱动主动臂摆动的摆动组件,所述主动臂后端与从动臂后端通过齿轮副连接,所述一对可同步翻转的夹爪分设于主动臂和从动臂上,至少一件夹爪上装设有可驱动夹爪翻转的旋转驱动件。该翻转式机械手具有结构简单紧凑、成本低廉、适用性强的优点。
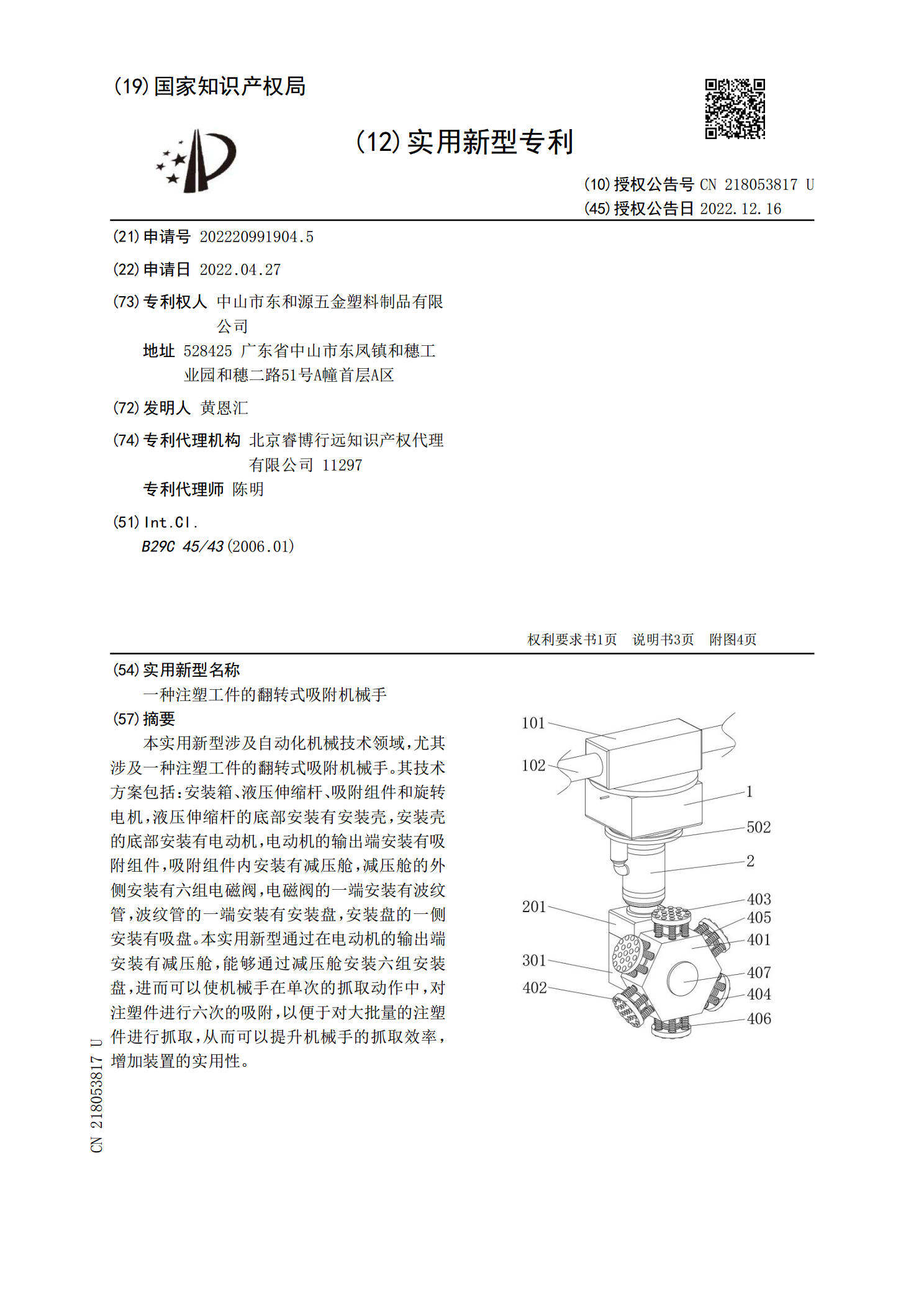
一种注塑工件的翻转式吸附机械手.pdf
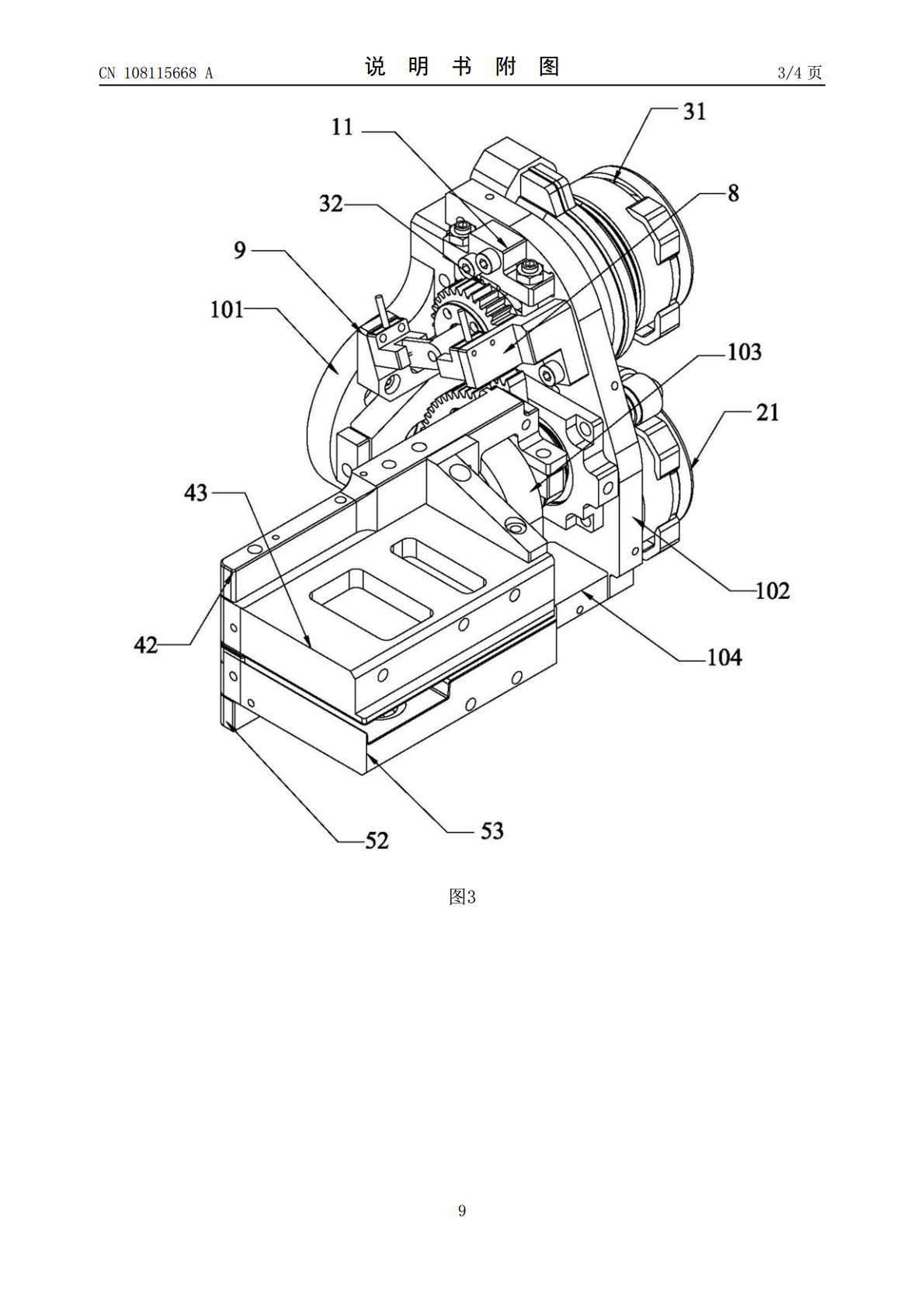
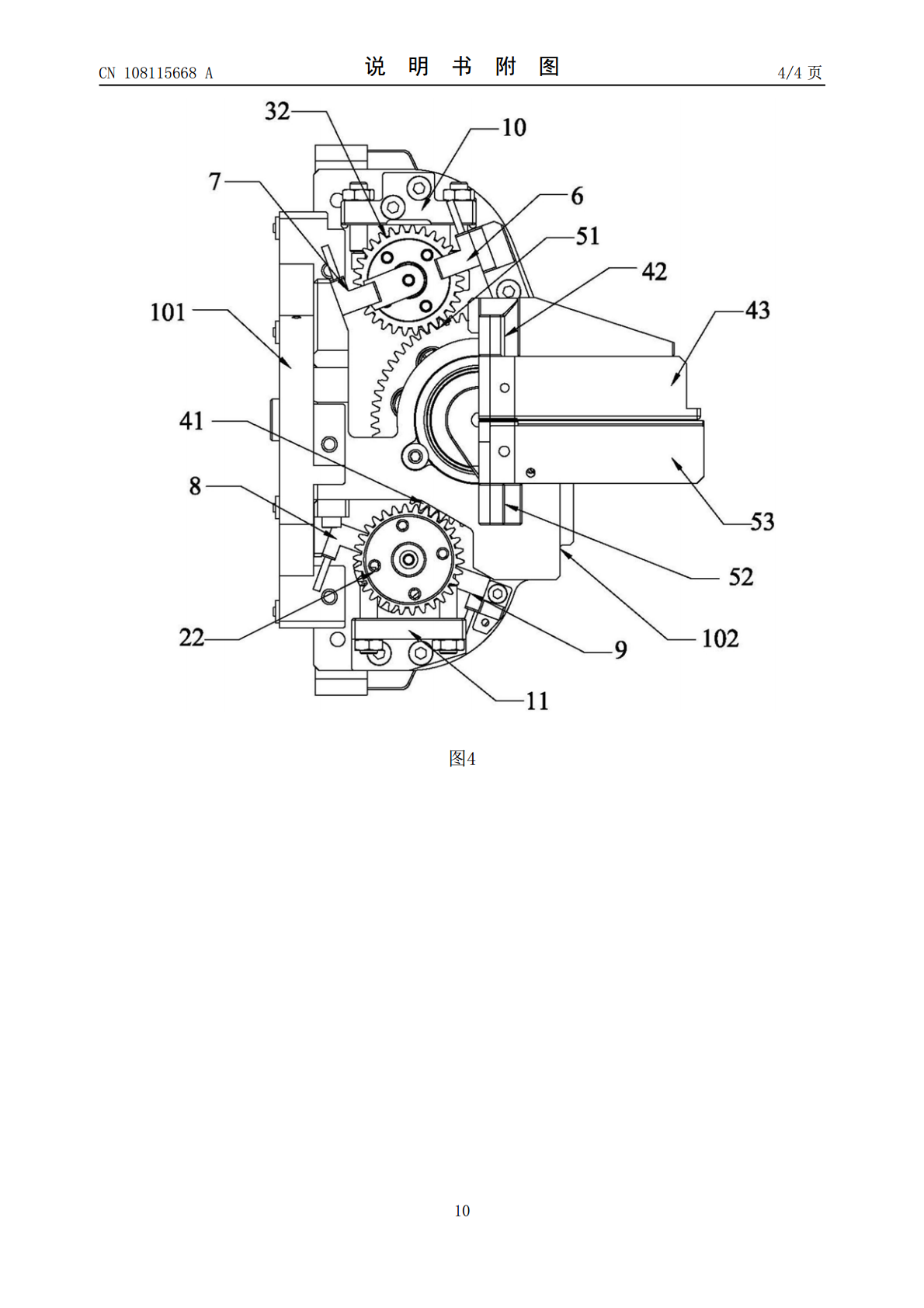
本实用新型涉及自动化机械技术领域,尤其涉及一种注塑工件的翻转式吸附机械手。其技术方案包括:安装箱、液压伸缩杆、吸附组件和旋转电机,液压伸缩杆的底部安装有安装壳,安装壳的底部安装有电动机,电动机的输出端安装有吸附组件,吸附组件内安装有减压舱,减压舱的外侧安装有六组电磁阀,电磁阀的一端安装有波纹管,波纹管的一端安装有安装盘,安装盘的一侧安装有吸盘。本实用新型通过在电动机的输出端安装有减压舱,能够通过减压舱安装六组安装盘,进而可以使机械手在单次的抓取动作中,对注塑件进行六次的吸附,以便于对大批量的注塑件进行抓取

一种翻转式双臂取放工件机械手.pdf
本发明涉及一种翻转式双臂取放工件机械手。一种翻转式双臂取放工件机械手,在斜底座(12)的上方安装有大底座(11),在大底座(11)的上方固定有旋转轴承座(7),在大底座(11)的两个外侧分别安装有控制电柜(10)和电磁阀柜体(27)。在Y轴型材支架(22)的另一端安装有Y轴端部外罩固定底座(20);在Y轴线性导轨(21)上安装有Z轴滑动底座(29),在Z轴滑动底座(29)的侧面设有Z轴线性滑块固定板(19),在Z轴线性滑块固定板(19)的上部设有Y轴坦克链(23)。本发明利用相关机械部件和电子部件结合,可

一种翻转式多工位上下料机械手.pdf
一种翻转式多工位上下料机械手,包括料盒、第一翻转机构、第二翻转机构、Z轴驱动机构、Y轴驱动机构、加工台和复数个吸附机构,料盒内设有复数个排序腔,排序腔内竖立排列放置待加工面板和已加工面板,待加工面板与已加工面板之间留有取料空间,加工台沿面板排列方向设于料盒的后方,Y轴驱动机构沿面板排列方向设于料盒的一侧,Y轴驱动机构与Z轴驱动机构连接,Z轴驱动机构与第一翻转机构连接,第一翻转机构悬空于料盒的上方,第二翻转机构设于第一翻转机构上,吸附机构与第二翻转机构连接。本发明结构合理,能实现多工位上下料,精度高、加工效