
独轮双足行走机器人.pdf

曦晨****22

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

独轮双足行走机器人.pdf
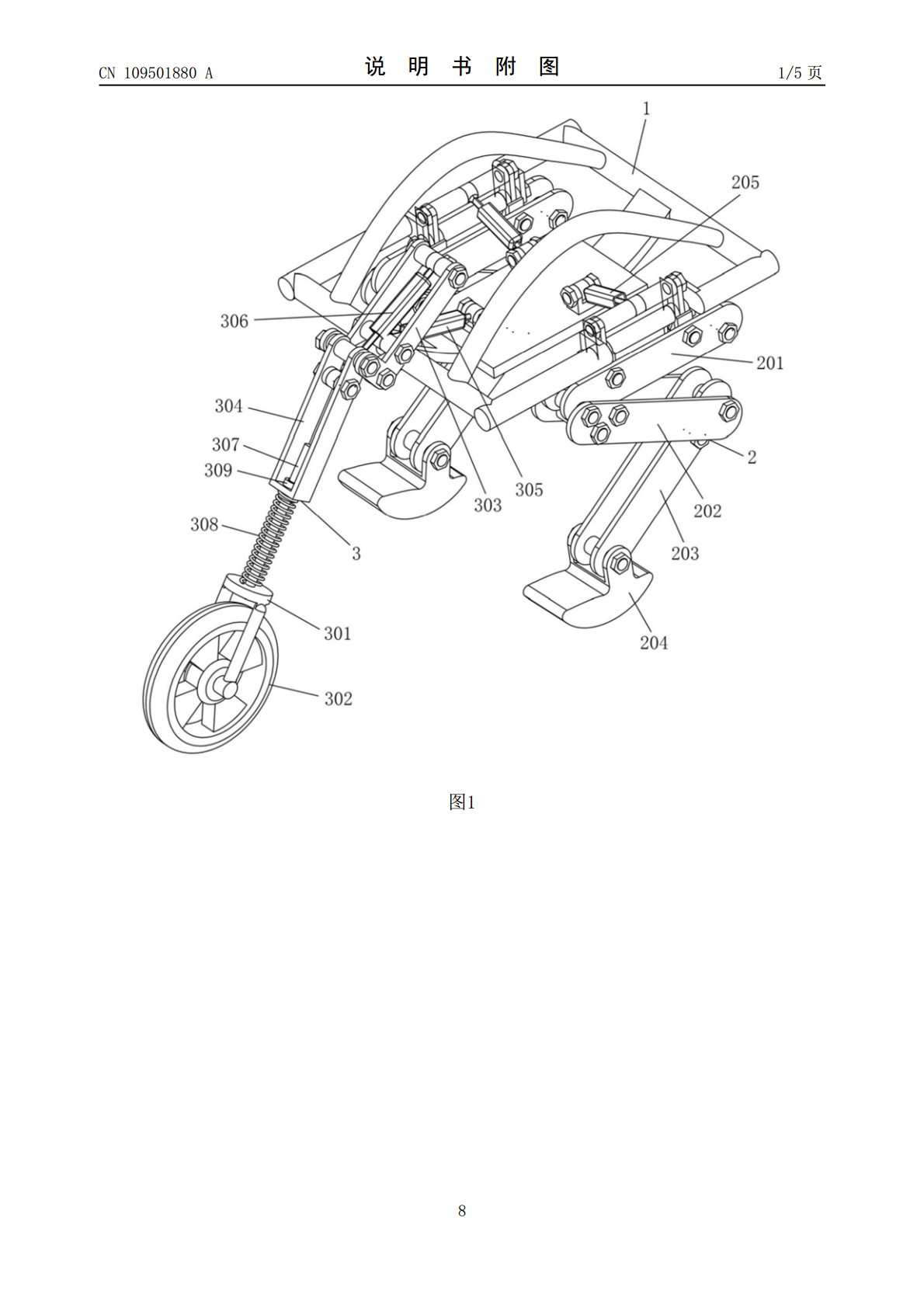
本发明公开了一种独轮双足行走机器人,包括机体和安装在机体上的两条仿生腿,机体上还安装有轮腿,轮腿包括腿架和安装在腿架上的一个以上行走滚轮,腿架通过调节组件以能调节高度的方式安装在机体上。该独轮双足行走机器人具有运动灵活性好、适应能力强、适用范围广、结构简单紧凑、成本低廉等优点。
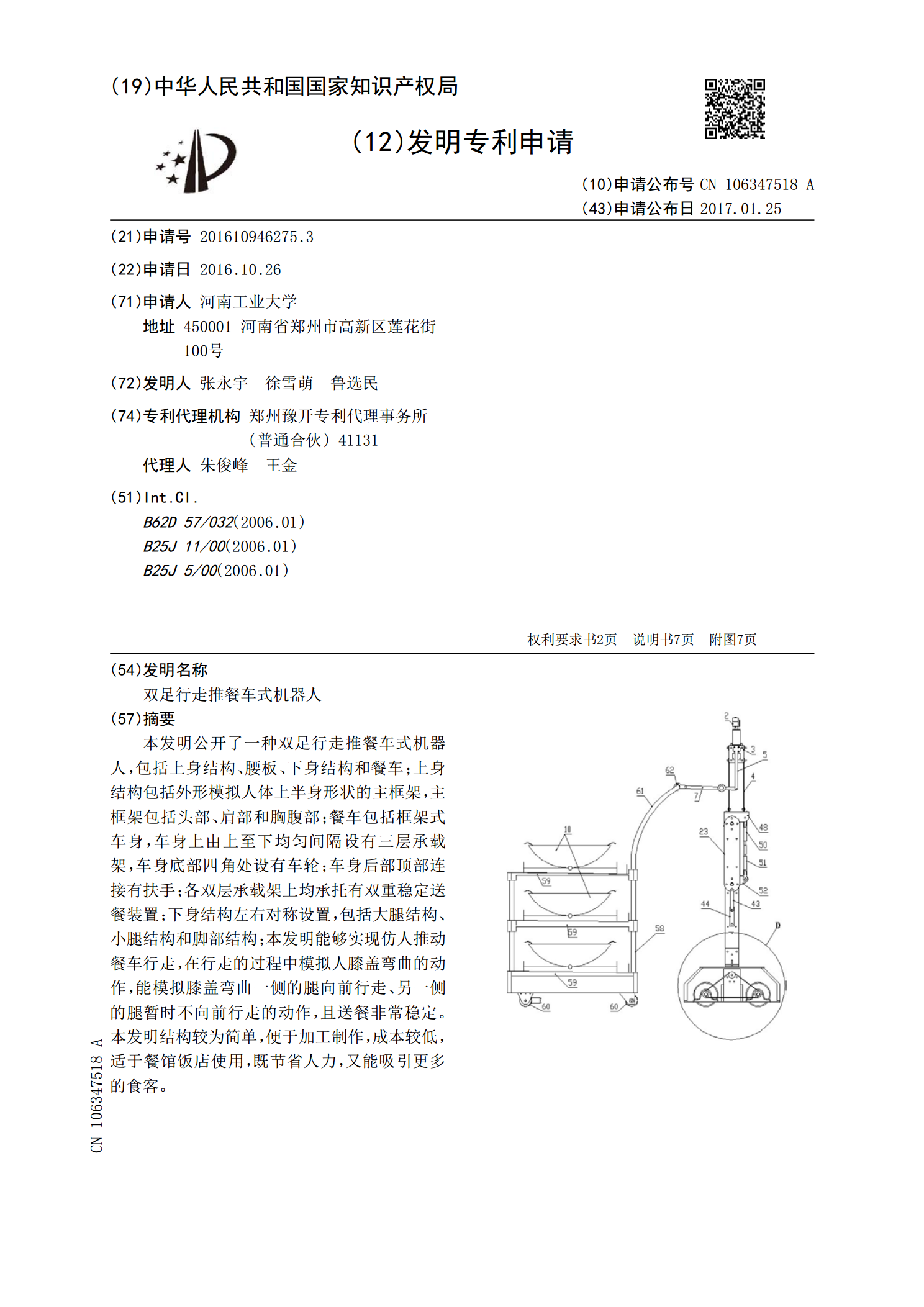
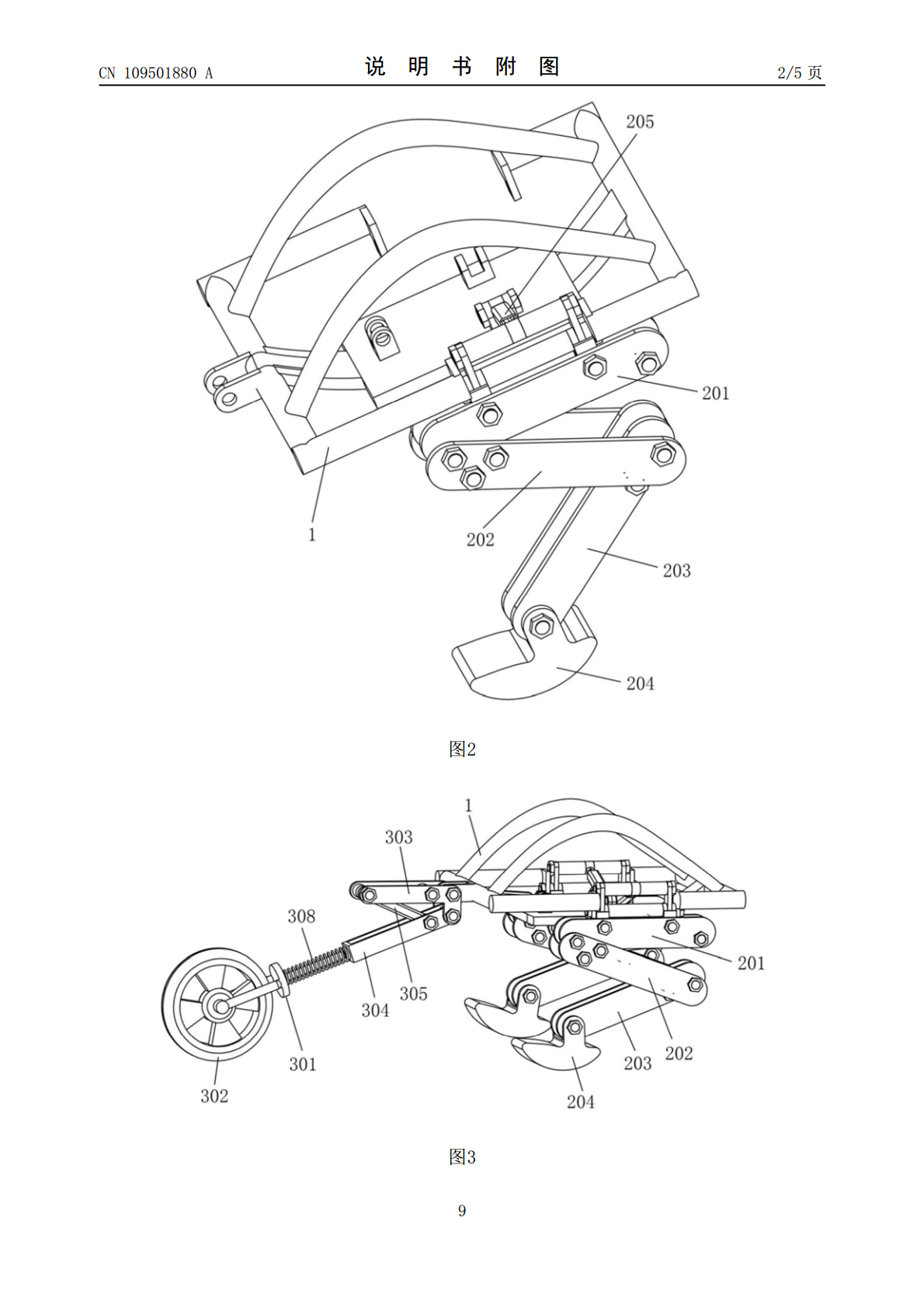
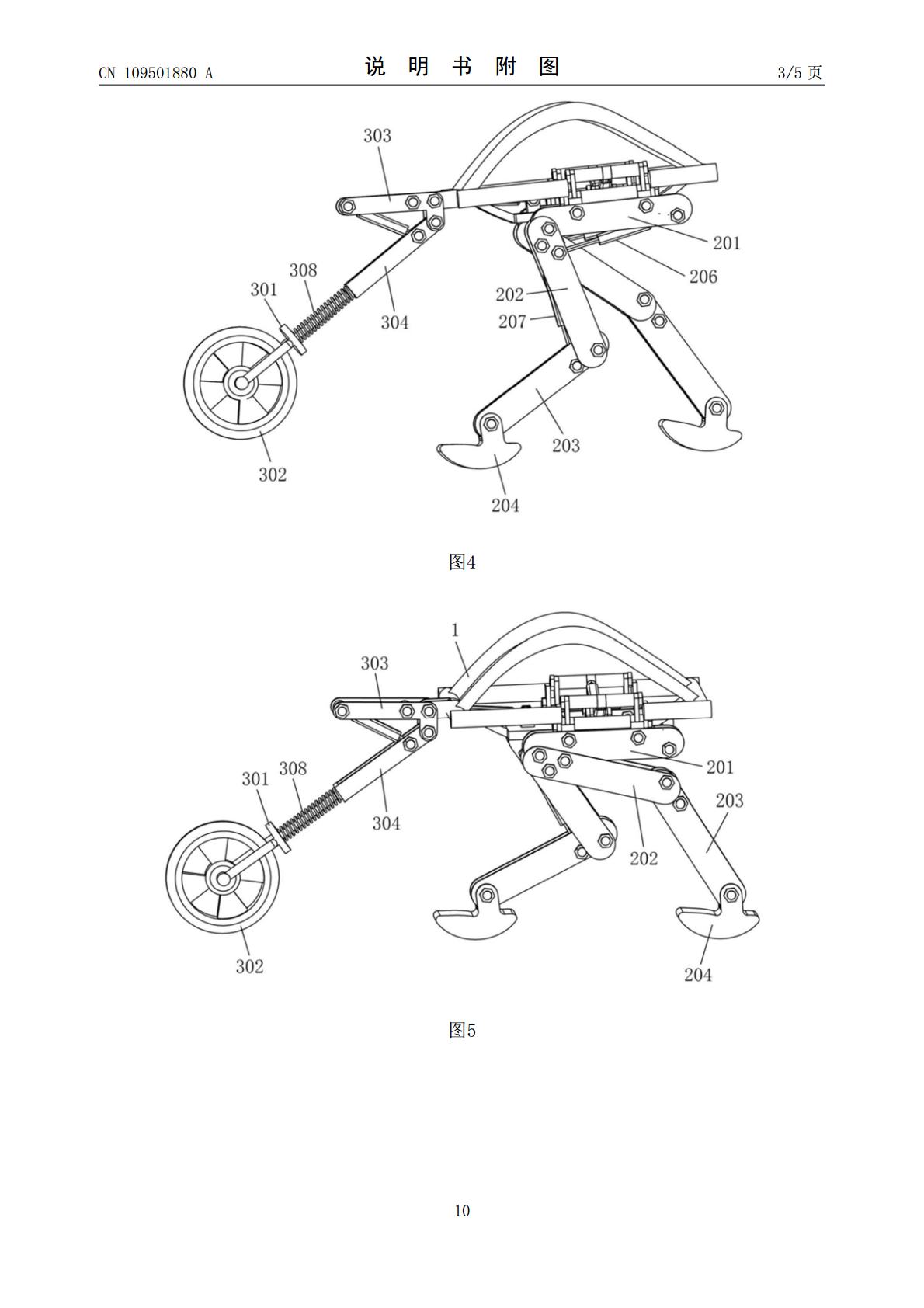
双足行走推餐车式机器人.pdf
本发明公开了一种双足行走推餐车式机器人,包括上身结构、腰板、下身结构和餐车;上身结构包括外形模拟人体上半身形状的主框架,主框架包括头部、肩部和胸腹部;餐车包括框架式车身,车身上由上至下均匀间隔设有三层承载架,车身底部四角处设有车轮;车身后部顶部连接有扶手;各双层承载架上均承托有双重稳定送餐装置;下身结构左右对称设置,包括大腿结构、小腿结构和脚部结构;本发明能够实现仿人推动餐车行走,在行走的过程中模拟人膝盖弯曲的动作,能模拟膝盖弯曲一侧的腿向前行走、另一侧的腿暂时不向前行走的动作,且送餐非常稳定。本发明结构

一种双足行走机器人.pdf
本发明涉及机器人技术领域,尤其是一种双足行走机器人,包括四边形框架,所述四边形框架内部设有动力传输机构,所述旋转电机的动力输出轴上固接有第四带轮,所述第四带轮通过皮带与固接在中间转轴上的第三带轮连接,中间转轴上同轴固接有两个第二带轮,两个第二带轮分别置于第三带轮两侧,每个连接板上均转动连接有一个竖直设置的支撑板,每个支撑板底端均固接有一个支撑脚,旋转电机上连接有plc控制器,所述plc控制器连接有自动避障模块、语音播报模块、无线控制模块。本装置结构简单,使用方便,制造成本很低,运动过程中能够通过自动避障模

双足行走机器人平衡控制译文.docx
外文资料:Robots1.IntroductionNowadays,theapplicationsofmachinesandrobotstoassisthumaninperformingtheirtaskshasbecomeincreasinglyextensive.Inindustrialapplications,theuseofroboticssystemhasreachedthelevelwhichsurpasseshumanabilityintermsofspeedandaccuracy.Onth

微型双足壁面行走机器人机构.pdf
一种微型双足壁面行走机器人机构,第二轴与机器人机架以第二转动副、第四转动副连接;第三齿轮通过第二离合器与第三轴连接;第三轴与机器人机架以第三转动副连接,并与第二行走吸附足以第二螺旋副连接;第一行走吸附足与机器人机架以第一圆柱副连接。本发明与现有技术相比,具有以下优点及突出性效果:该机器人机构通过行走吸附足与离合器之间的配合,可实现定轴轮系与行星轮系之间的变换,从而保证了工作状态时的稳定与较大的负载能力,且行走方式简单、驱动少。同时结构紧凑、尺寸小、成本低、重量轻、控制简单,负载力大,具有行走、越障等功能。